技术要点:计算架构与核心能力

运行要点:从设计到实施的闭环
一个先进的飞控系统要稳定运行,需要在设计之初就系统性规划以下要点:
1. 架构与软硬件设计
异构融合与云边协同:机载端采用类似"灵筹"平台的多核异构架构,应对实时任务;同时需建立类似"神思智飞"的云边协同机制,让复杂、非实时计算上云,实现全局最优调度。
确定性的通信网络:对于超视距或集群应用,必须保证指令传输的低时延和确定性。可借鉴"庆阳模式",通过确定性网络技术,将端到端时延稳定控制在毫秒级。
开放与安全平衡:可采取"控制层封闭、应用层开放"的策略。核心飞控代码封闭以确保绝对安全,同时开放任务处理器接口,允许合作伙伴进行上层应用开发。
2. 数据处理与决策
多传感器深度融合:需要融合摄像头、雷达、IMU、GPS等多源传感器数据,这是实现精准环境感知和稳定控制的基础。
分层决策机制:将决策分为机载实时决策(如紧急避障)和云端策略决策(如全局任务规划)。例如,"神思智飞"能在10秒内完成追踪目标的接力锁定。
高效的算法部署:在机载有限算力下,需使用模型剪枝、蒸馏等技术压缩AI模型。同时,像"灵筹"平台那样提供标准化的开发工具,能大幅缩短算法适配周期。
3. 通信与协同
多模冗余通信:应集成4G/5G、卫星通信(如北斗)、自组网(Mesh)等多种链路,根据场景自动切换,确保链路永远在线。
集群智能协同:集群内无人机需能通过自组网共享信息,并基于协同控制模型,实现编队、搜索等群体智能行为。
4. 系统运行与保障
全周期可靠性保障:从设计就需遵循航空级标准,采用冗余设计(如双IMU、双处理器)。建立从研发、测试到部署的全链路质量管控和快速售后响应体系。
持续的迭代与服务:系统应支持OTA(空中升级),并能通过类似"联合创新实验室"的模式,与用户共同优化算法,加速技术转化。
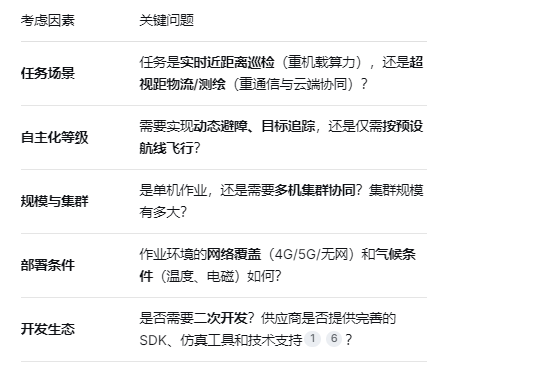
如何选择与规划
在规划或选择飞控算力方案时,你可以从以下几个问题入手进行思考: