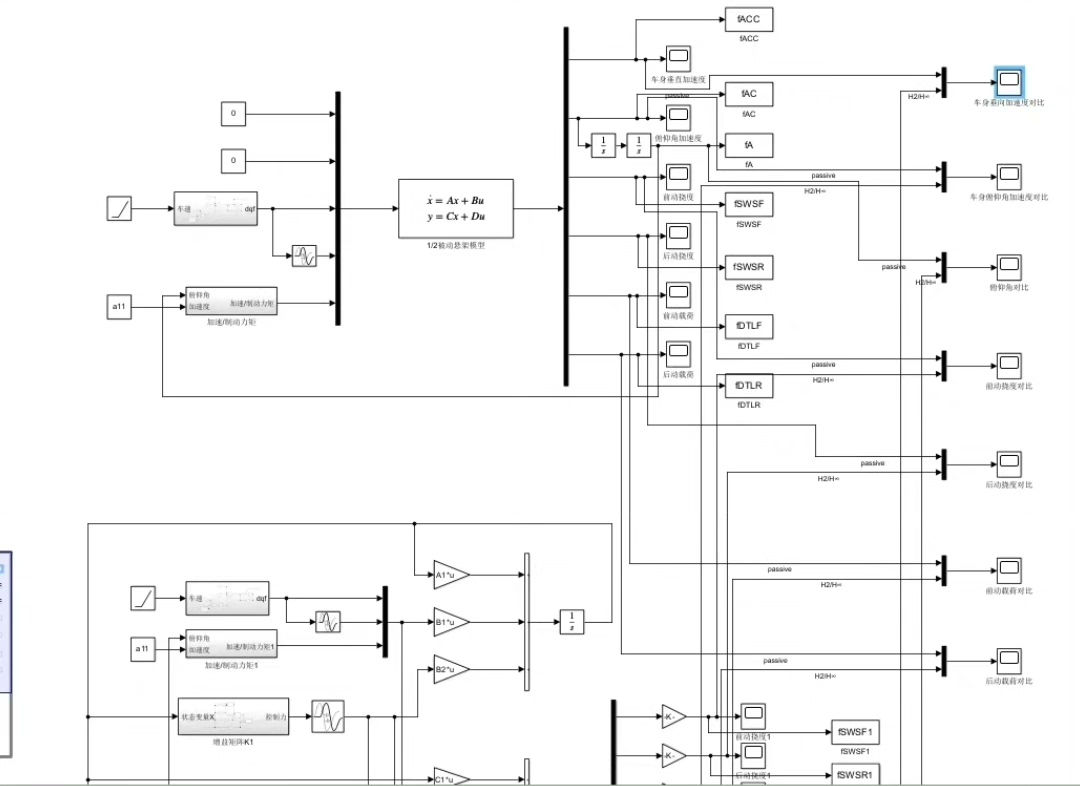
matlab/simulink半车主动悬架建模:基于ADRC(自抗扰控制)的主动悬架控制。 主体模型为半车主动悬架,采取ADRC控制。 输出为车身加速度,悬架动挠度,轮胎动变形。 默认输入为正弦路面输入。 有与pid控制的效果对比。
在汽车悬架系统的研究领域,如何提升车辆行驶的平顺性和操纵稳定性一直是热门话题。今天咱就来唠唠基于 Matlab/Simulink 的半车主动悬架建模,主角是自抗扰控制(ADRC),顺便和经典的 PID 控制来个效果大比拼。
半车主动悬架主体模型搭建
咱先把半车主动悬架模型在 Simulink 里搞起来。这个模型就像是汽车悬架的一个简化"替身",它主要考虑车身垂直方向的运动、悬架的压缩与拉伸,以及轮胎与路面的接触变形。在 Simulink 里,我们可以通过各种模块来构建这个模型,就像搭乐高一样。
比如,车身质量可以用一个积分器模块来模拟其运动,悬架弹簧和阻尼则可以用相应的力模块来表示。这里简单给个伪代码示意一下悬架力的计算(Matlab 风格):
matlab
% 假设已经定义了弹簧刚度 k 和阻尼系数 c
% 悬架动挠度 z_s - z_u
deflection = z_s - z_u;
% 悬架力 F_suspension = k * deflection + c * (dz_s/dt - dz_u/dt)
F_suspension = k * deflection + c * (diff(z_s)/dt - diff(z_u)/dt);这里 zs**是车身位移,z u 是悬架下质量位移,通过这些计算来模拟悬架力对车身运动的影响。
ADRC 控制闪亮登场
ADRC 这玩意儿可不简单,它能把系统内部和外部的干扰统统"抗住",让系统输出更稳定。在 Simulink 里实现 ADRC 控制,首先得了解它的几个关键部分:跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈控制律(NLSEF)。
跟踪微分器(TD)
TD 的作用是安排过渡过程,让系统输出能够平滑地跟踪输入信号。咱来段简单的 TD 代码:
matlab
function [x1, x2] = TD(r, h, x1, x2)
% r 是输入参考信号,h 是步长
d = r * h;
a0 = x2;
y = x1 - r;
a1 = sqrt(a0^2 + 8 * r * abs(y) / h);
if a0 >= 0
a = (a0 + a1) / 2;
else
a = (a0 - a1) / 2;
end
if abs(y) <= d
x2 = x2 - (a / h) * y;
else
x2 = x2 - sign(y) * r;
end
x1 = x1 + h * x2;
end这段代码通过不断调整 x1 和 x2,让 x1 能够较好地跟踪输入 r,并且输出是平滑的,避免了传统直接跟踪可能出现的超调等问题。
扩张状态观测器(ESO)
ESO 就像是一个"侦察兵",能实时观测系统的状态和干扰。代码大概长这样:
matlab
function [z1, z2, z3] = ESO(y, u, z1, z2, z3, b0, beta01, beta02, beta03, alpha1, alpha2, alpha3, h)
% y 是系统输出,u 是控制输入
e = z1 - y;
z1 = z1 + h * (z2 - beta01 * fal(e, alpha1, delta));
z2 = z2 + h * (z3 - beta02 * fal(e, alpha2, delta) + b0 * u);
z3 = z3 - h * beta03 * fal(e, alpha3, delta);
end这里通过不断更新 z1、z2 和 z3,把系统状态和干扰都给"观测"出来了,为后续的控制提供有力支持。
非线性状态误差反馈控制律(NLSEF)
有了 TD 和 ESO 的成果,NLSEF 就负责根据观测到的状态和误差来计算最终的控制输入。代码类似这样:
matlab
function u0 = NLSEF(v1, v2, z1, z2, z3, kp, kd, alpha01, alpha02, delta)
e1 = v1 - z1;
e2 = v2 - z2;
u0 = kp * fal(e1, alpha01, delta) + kd * fal(e2, alpha02, delta) - z3;
end通过这几个部分的协同工作,ADRC 就能实现对主动悬架的有效控制啦。
PID 控制也来凑个热闹
PID 控制作为控制领域的"老大哥",简单易懂还好用。在 Simulink 里,PID 控制模块直接就能用。它通过比例(P)、积分(I)和微分(D)三个环节来调整控制量,代码实现也比较简单:
matlab
% 假设设定值为 setpoint,当前反馈值为 feedback
error = setpoint - feedback;
% 积分项累加
integral = integral + error * dt;
% 微分项计算
derivative = (error - previous_error) / dt;
% PID 控制输出
control_output = Kp * error + Ki * integral + Kd * derivative;
previous_error = error;这里 Kp、Ki 和 Kd 分别是比例、积分和微分系数,通过调整这几个系数来优化控制效果。
效果对比:ADRC vs PID
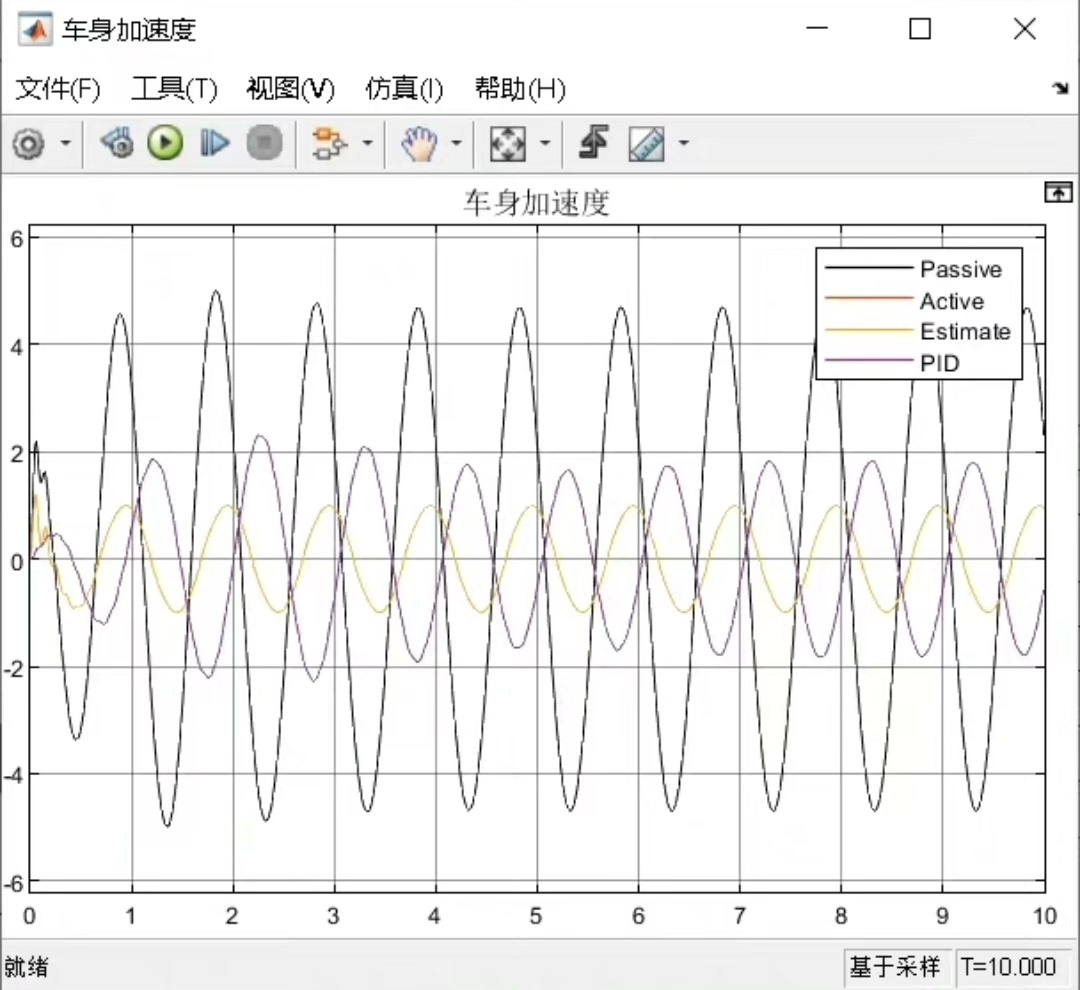
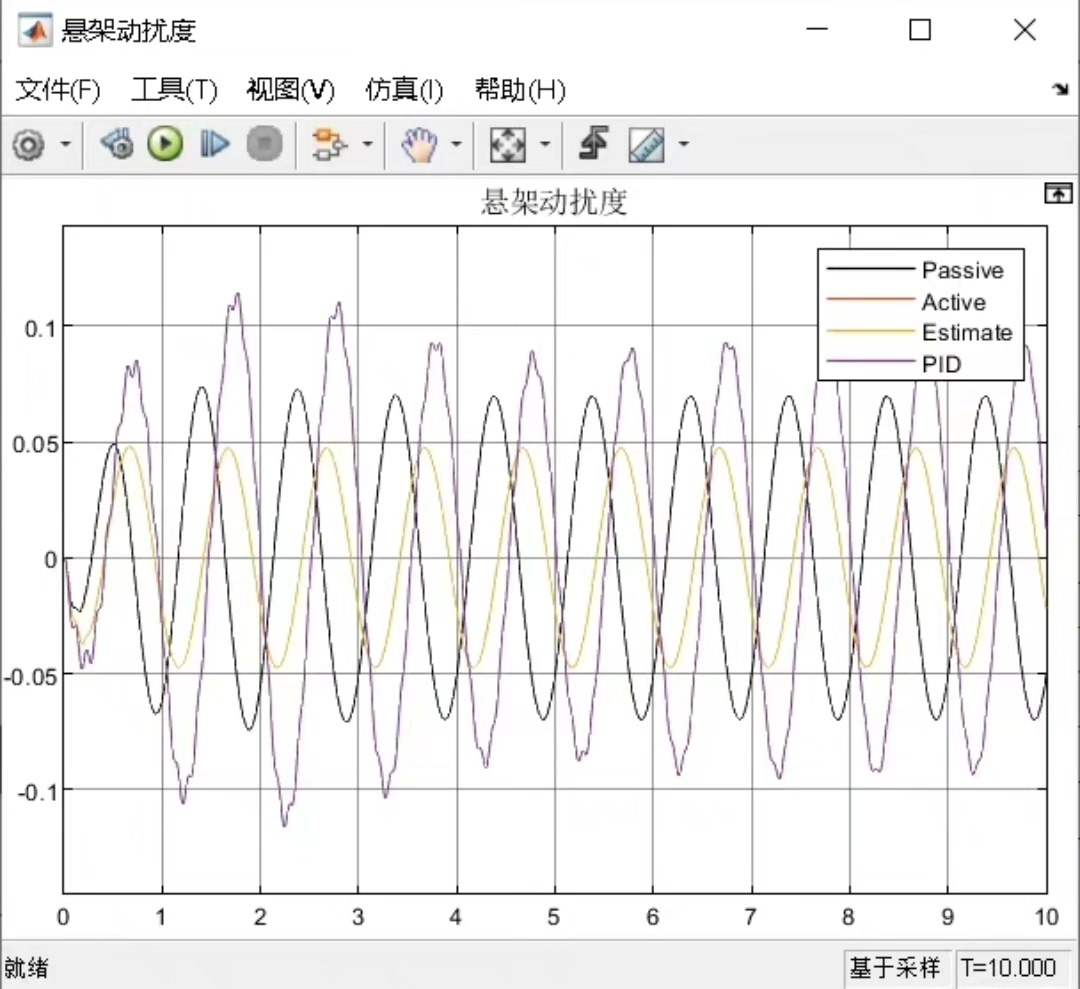
我们设定默认输入为正弦路面输入,就像车辆行驶在那种有规律起伏的路面上。运行模型后,看看 ADRC 和 PID 控制下的输出:车身加速度,悬架动挠度,轮胎动变形。
从结果上看,ADRC 控制下的车身加速度在面对正弦路面输入时,波动相对较小,能让车内乘客感觉更平稳。这是因为 ADRC 强大的抗干扰能力,能及时"应对"路面带来的各种干扰。
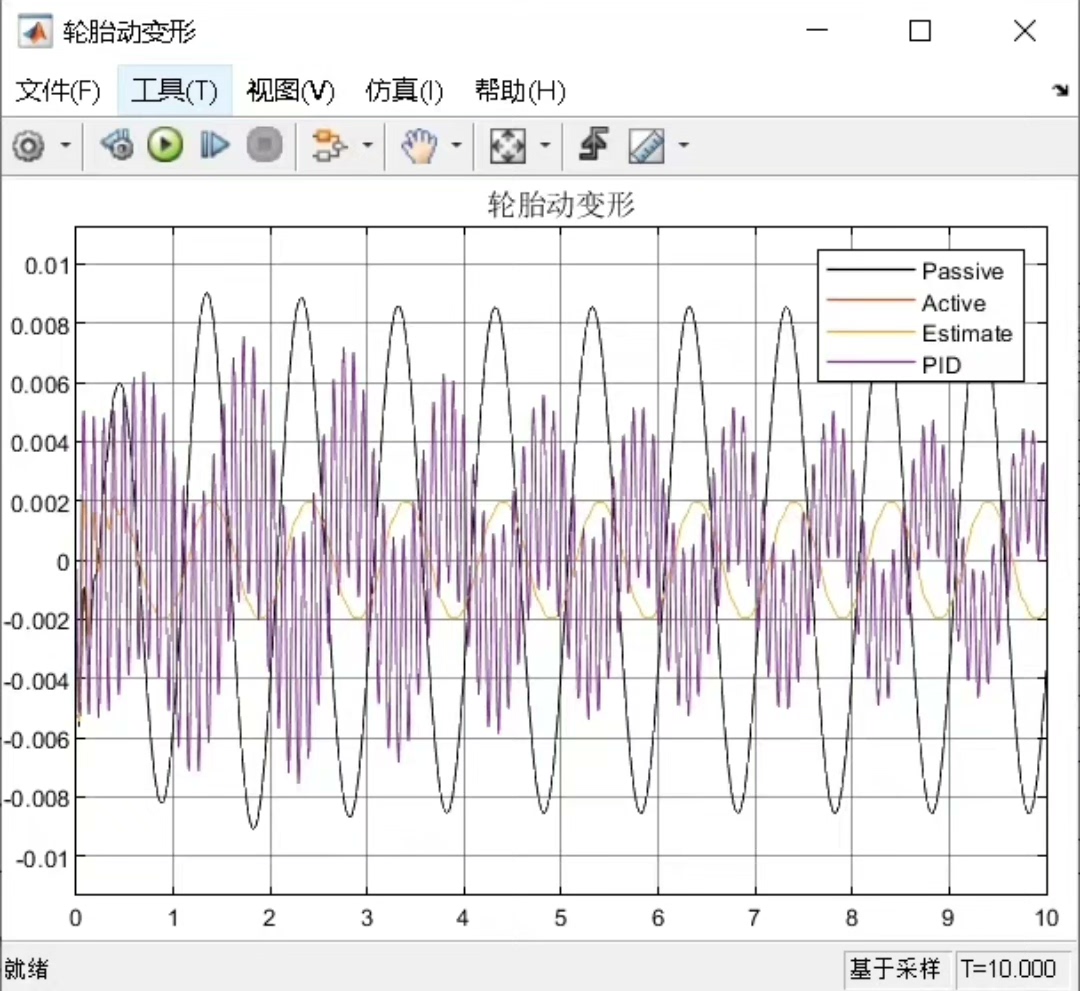
而 PID 控制呢,如果参数调得好,也能有不错的效果,但在面对一些复杂干扰时,可能就不如 ADRC 那么"淡定"了。比如在路面起伏变化较大时,PID 控制下的悬架动挠度可能会出现较大的波动,影响车辆的舒适性和操纵稳定性。
总的来说,这次 Matlab/Simulink 半车主动悬架建模之旅,让我们看到了 ADRC 和 PID 在主动悬架控制上各有千秋。ADRC 以其独特的抗干扰能力在复杂路况下表现出色,而 PID 则凭借简单易调在一些场景中也能发挥作用。希望这篇博文能给研究汽车悬架控制的小伙伴们一些启发。