关键信息:
-
对于
xEventListItem,会设置其xItemValue为configMAX_PRIORITIES - uxPriority。这样,在事件列表中,值越小(优先级越高)的任务会排在前面 。 -
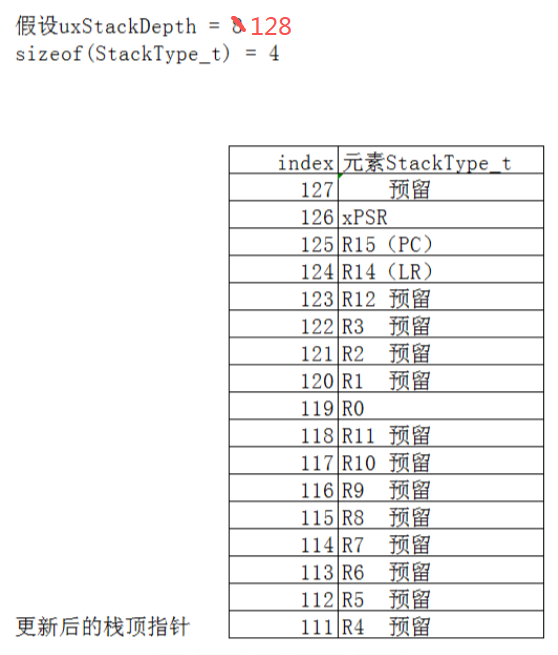
关于栈顶的最高的四字节的作用:
pxTopOfStack = &( pxNewTCB->pxStackuxStackDepth - 1 );
在pxPortInitialiseStack函数中,第一步执行了pxTopOfStack自减操作,预留了一个元素的空间。
代码中注释:
/* Offset added to account for the way the MCU uses the stack on entry/exit of interrupts. */
目前没有找到合理的解释,暂时认为是为了匹配真实的中断而预留的四个字节的空间。
- 初始化完栈空间后的内存分布,总共保存了16个寄存器:
- 栈指针R13未在保存列表中,它是如何压栈、出栈的?
以下内容由AI生成。
在 FreeRTOS 中,prvInitialiseNewTask是一个核心的静态函数 (由 static关键字修饰,仅在 task.c文件内部使用),它负责对已分配好内存的新任务进行详细的初始化设置。这个函数是任务创建过程(如 xTaskCreate)中的关键一环,完成了从"一块内存"到"一个可调度任务"的转变 。
下面这个表格概括了 prvInitialiseNewTask函数的基本信息。
| 特性 | 说明 |
|---|---|
| 函数类型 | 静态函数(static),内部使用 |
| 主要调用者 | xTaskCreate, xTaskCreateStatic |
| 核心职责 | 初始化任务控制块(TCB)的各个字段,设置任务名称、优先级、列表项,并初始化任务堆栈 |
| 关键输出 | 一个完全初始化、准备好可被调度的任务控制块(TCB) |
💡 函数参数详解
prvInitialiseNewTask函数接受多个参数,这些参数共同定义了新任务的属性 :
-
pxTaskCode:指向任务具体实现函数的指针。该函数通常是一个永不返回的无限循环。 -
pcName:一个字符串,用于标识任务,便于调试。其长度不能超过FreeRTOSConfig.h中configMAX_TASK_NAME_LEN的定义 。 -
ulStackDepth:指定任务堆栈的深度(字数)。实际分配的字节数为ulStackDepth * sizeof(StackType_t)。 -
pvParameters:一个泛型指针(void *),用于在任务创建时向任务函数传递参数 。 -
uxPriority:指定任务的优先级。有效的优先级范围是 0(最低优先级,通常是空闲任务)到(configMAX_PRIORITIES - 1)(最高优先级)。 -
pxCreatedTask:用于回传新创建任务的句柄(TaskHandle_t),后续可用于引用此任务(如删除、更改优先级等)。 -
pxNewTCB:指向已分配内存的任务控制块(TCB)的指针,函数将对此 TCB 进行初始化 。 -
xRegions:与内存保护单元(MPU)相关的内存区域指针 。
🔄 初始化流程详解
prvInitialiseNewTask函数的初始化工作可以概括为以下几个关键步骤:
-
堆栈初始化与栈顶计算
-
堆栈填充 :如果使能了堆栈溢出检测(
configCHECK_FOR_STACK_OVERFLOW > 1)或追踪功能(configUSE_TRACE_FACILITY == 1),函数会使用一个已知值(通常是tskSTACK_FILL_BYTE,其值多为0xa5U)来填充整个任务堆栈。这主要用于辅助调试,可以通过检查内存中该模式被覆盖的情况来判断堆栈的使用深度 。 -
计算栈顶地址 :根据处理器架构的堆栈增长方向(通过
portSTACK_GROWTH定义,例如 ARM Cortex-M 通常为向下增长),计算出正确的栈顶地址(pxTopOfStack),并确保其按字节对齐(通常是 8 字节对齐)。
-
-
TCB 基础字段初始化
-
任务名称 :将传入的任务名称字符串复制到 TCB 的
pcTaskName数组中,并确保字符串以\0结尾 。 -
任务优先级 :检查并确保设置的优先级在有效范围内。如果优先级
uxPriority大于或等于configMAX_PRIORITIES,则将其设置为configMAX_PRIORITIES - 1。然后将优先级值存入 TCB 的uxPriority字段。如果使能了互斥信号量(configUSE_MUTEXES == 1),还会初始化优先级继承机制相关的uxBasePriority等字段 。
-
-
列表项初始化
-
任务控制块中包含两个重要的列表项:
xStateListItem(用于将任务挂载到就绪、阻塞、挂起等状态列表)和xEventListItem(用于事件列表)。 -
函数会调用
vListInitialiseItem初始化这两个列表项 。 -
使用
listSET_LIST_ITEM_OWNER宏将列表项的pvOwner指向所属的 TCB,这样就能从列表项方便地找到其所属的任务 。 -
对于
xEventListItem,会设置其xItemValue为configMAX_PRIORITIES - uxPriority。这样,在事件列表中,值越小(优先级越高)的任务会排在前面 。
-
-
其他功能字段初始化
-
根据
FreeRTOSConfig.h中的配置,函数会初始化 TCB 中的其他功能字段,例如 :-
临界区嵌套计数器(
uxCriticalNesting) -
线程本地存储指针(
pvThreadLocalStoragePointers) -
任务通知相关字段(
ulNotifiedValue,ucNotifyState) -
运行时间统计计数器(
ulRunTimeCounter)等。
-
-
-
任务堆栈初始化
-
这是非常关键的一步。函数调用架构相关的
pxPortInitialiseStack函数,模拟一个任务被中断后的现场,将必要的初始值按特定顺序压入任务堆栈 。 -
初始化的寄存器通常包括:
-
xPSR :程序状态寄存器,通常设置为
portINITIAL_XPSR(如0x01000000),表示 Thumb 状态。 -
PC (R15) :程序计数器,初始化为任务函数的入口地址(
pxTaskCode)。 -
LR (R14) :链接寄存器,初始化为一个退出函数(如
prvTaskExitError),以便任务函数返回时能进行错误处理。 -
R0 :通常用于传递任务参数(
pvParameters)。 -
其他寄存器(如 R1-R12)也可能被初始化或保留为特定值 。
-
-
初始化后的堆栈指针(栈顶地址)会保存在 TCB 的
pxTopOfStack字段中,用于后续的上下文切换 。
-
-
生成任务句柄
- 最后,如果传入的
pxCreatedTask参数非空,函数会将初始化好的 TCB 指针赋值给*pxCreatedTask,生成任务句柄供外部使用 。
- 最后,如果传入的
⚠️ 核心要点与关联
理解 prvInitialiseNewTask时,有几个关键点需要注意:
-
内存已分配 :该函数假定 TCB 和任务堆栈所需的内存已经成功分配 。在动态创建中,这由
xTaskCreate通过pvPortMalloc完成;在静态创建中,则由用户提供 。 -
任务尚未就绪 :
prvInitialiseNewTask执行完毕后,任务虽然已经初始化,但还没有被调度器识别 。通常紧接着会调用prvAddNewTaskToReadyList函数,将新任务的 TCB 添加到就绪列表(ready list)中,任务才真正处于可被调度的状态 。 -
硬件相关性 :堆栈的初始化细节(通过
pxPortInitialiseStack)和堆栈增长方向(portSTACK_GROWTH)是高度依赖于具体的处理器架构(移植层)的 。
prvInitialiseNewTask函数就像是为新任务置办"身份证"和"初始状态", meticulously 设置好任务运行所需的一切静态数据,为第一次被调度执行做好万全准备。