#include "stm32f10x.h" // Device header
#include "delay.h"
#include "stdio.h"
unsigned int a;
int fputc(int ch, FILE *f)//重定义打印函数,可以使用printf
{
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, (uint8_t)ch); //USART1->DR = (u8) ch
return ch;
}
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
GPIO_InitTypeDef GPIO_STRUTURE;
GPIO_STRUTURE.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_STRUTURE.GPIO_Pin=GPIO_Pin_9;
GPIO_STRUTURE.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_STRUTURE);
GPIO_STRUTURE.GPIO_Mode=GPIO_Mode_IPU;
GPIO_STRUTURE.GPIO_Pin=GPIO_Pin_10;
GPIO_Init(GPIOA,&GPIO_STRUTURE);
GPIO_STRUTURE.GPIO_Mode=GPIO_Mode_AIN;
GPIO_STRUTURE.GPIO_Pin=GPIO_Pin_1;//adc1对应
GPIO_Init(GPIOA,&GPIO_STRUTURE);
USART_InitTypeDef USART_STRUTURE;
USART_STRUTURE.USART_BaudRate=9600;
USART_STRUTURE.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_STRUTURE.USART_Mode=USART_Mode_Tx| USART_Mode_Rx;
USART_STRUTURE.USART_Parity=USART_Parity_No;
USART_STRUTURE.USART_StopBits=USART_StopBits_1;
USART_STRUTURE.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1,&USART_STRUTURE);
USART_Cmd(USART1,ENABLE);//串口设置
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
ADC_DeInit(ADC1);
ADC_InitTypeDef ADC_STRUTURE;
ADC_STRUTURE.ADC_ContinuousConvMode=DISABLE;
ADC_STRUTURE.ADC_DataAlign=ADC_DataAlign_Right;
ADC_STRUTURE.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;
ADC_STRUTURE.ADC_Mode=ADC_Mode_Independent;
ADC_STRUTURE.ADC_NbrOfChannel=1;
ADC_STRUTURE.ADC_ScanConvMode=DISABLE;
ADC_Init(ADC1,&ADC_STRUTURE);
ADC_Cmd(ADC1,ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));//adc配置
printf("你好,hello,world!\r\n");//复位键按下输出
delay(1000);
while(1)
{
ADC_RegularChannelConfig(ADC1,ADC_Channel_1,1,ADC_SampleTime_239Cycles5);
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC)== RESET);
a=ADC_GetConversionValue(ADC1);
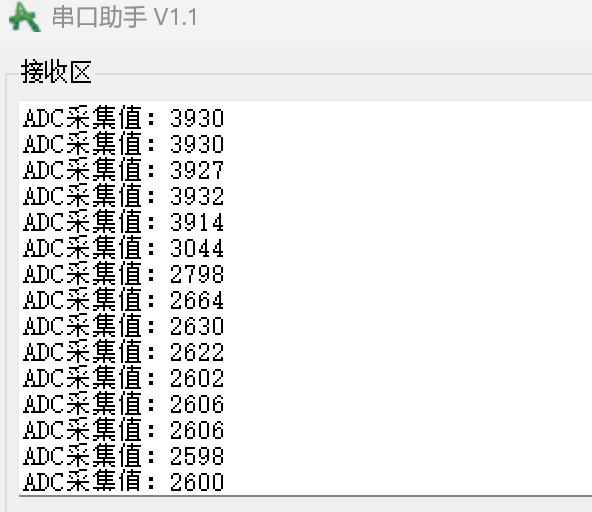
printf("ADC采集值:%d\r\n", a);//循环输出
delay(1000) ;
}
}光照从暗(遮挡)到亮,值越小