hello~这里是维构lbs智能定位,如果有项目需求和技术交流欢迎来私信我们~点击文章最下方可获取室内定位解决方案。
上篇 室内定位无线技术的分类和原理全解析(一)系统解析室内定位无线技术的分类与原理,涵盖射频、声波、光学及新兴技术四大类。从蓝牙、Wi-Fi、UWB到RFID,再到超声波、可见光、毫米波雷达等地磁方案,详解各类技术的核心原理、优缺点及典型应用场景,全面覆盖低成本普及与高精度需求的多元场景,本文我们将从主流室内定位无线技术的参数对比、核心算法和选型指南展开论述。
一、主流室内定位无线技术的参数对比
|-------------|---------------------------|-------------|----------------|-------------|---------------|---------------------|----------------------------|
| 技术类型 | 定位精度 | 部署成本 | 覆盖距离 | 抗干扰性 | 典型场景 | 核心优势 | 核心劣势 |
| 蓝牙BLE(RSSI) | 1-5米 | 低(信标几十元/个) | 10-50米 | 中(受Wi-Fi干扰) | 商场、养老院、资产追踪 | 低功耗、部署灵活 | 精度一般,易受干扰 |
| 蓝牙BLE(AoA) | 0.3-0.5米(需蓝牙 5.1 及以上协议支持) | 中(需AoA天线阵列) | 10-30米 | 中 | 高精度资产追踪、机器人导航 | 精度高,兼顾成本 | 天线阵列部署复杂 ,易受多径效应影响,需校准相位偏差 |
| Wi-Fi | 2-8米(传统 RSSI ) | 极低(利用现有路由器) | 50-100米 | 中(受同频干扰) | 写字楼、酒店、导购 | 零部署成本,覆盖广 | 精度低,依赖Wi-Fi密度 |
| UWB | 0.1-0.5米 | 高(基站几千元/个) | 50-100米(开阔环境下) | 高(抗金属/墙体遮挡) | 工业车间、矿井、手术室 | 精度最高,抗干扰强,支持多标签并发定位 | 成本高,需专用硬件,基站间时钟同步要求高 |
| RFID(无源) | 1-3米(区域级近距离方案) | 极低(标签几分钱/个 | 1-3米 | 高 | 资产盘点、图书馆 | 标签成本极低,读取快 | 精度低,读取距离近 |
| 超声波 | 0.1-1米 | 低 | 5-10米 | 低(受噪声干扰) | 机器人避障、小空间定位 | 精度高,成本低 | 穿透性差,距离短 |
| 可见光VLC | 0.1-0.5米 | 中(复用LED灯) | 5-10米 | 高(无射频干扰) | 医院、加油站 | 抗干扰强,无辐射 | 依赖视线,遮挡失效 |
二、主流室内定位无线技术的核心算法
核心定位算法是技术原理落地的关键,所有室内定位无线技术的核心,都是通过"信号特征"(强度、时间、角度)计算目标的位置,以下是三类最常用的核心算法:
1.RSSI三角定位算法(蓝牙和Wi-Fi通用的低成本方案)
核心逻辑:3个已知坐标的信标,分别测量与终端的信号强度(RSSI),通过衰减模型换算距离,再用三角几何计算终端坐标,信号衰减模型易受环境影响,实际应用中常结合动态指纹或机器学习(如 K - 近邻)优化精度。
python
RSSI 三角定位算法 的核心实现代码
import math
import numpy as np
from sklearn.neighbors import KNeighborsRegressor
# ===================== 1. 基础配置:信标参数与环境校准 =====================
# 已知坐标的3个信标(示例:蓝牙信标/Wi-Fi路由器)
beacons = {
"beacon1": {"x": 0, "y": 0, "rssi_1m": -45}, # 1米处参考RSSI(需实际校准)
"beacon2": {"x": 10, "y": 0, "rssi_1m": -46},
"beacon3": {"x": 5, "y": 8.66, "rssi_1m": -44}
}
# 环境衰减因子n(自由空间n=2,室内多径环境n=2.5~4,需实测校准)
ENV_ATTENUATION_FACTOR = 3.0
# ===================== 2. RSSI转距离:对数衰减模型 =====================
def rssi_to_distance(rssi, rssi_1m, n=ENV_ATTENUATION_FACTOR):
"""
从RSSI计算终端到信标的距离
:param rssi: 实测信号强度(dBm)
:param rssi_1m: 1米处参考RSSI(dBm)
:param n: 环境衰减因子
:return: 估算距离(米)
"""
if rssi == 0:
return 0 # 信号丢失,返回0
distance = 10 ** ((rssi_1m - rssi) / (10 * n))
return round(distance, 2)
# ===================== 3. 三角定位核心算法 =====================
def trilateration(beacon_coords, distances):
"""
三角定位解算终端坐标
:param beacon_coords: 信标坐标列表 [(x1,y1), (x2,y2), (x3,y3)]
:param distances: 终端到各信标的距离列表 [d1, d2, d3]
:return: 终端估算坐标 (x, y)
"""
# 提取三个信标的坐标
x1, y1 = beacon_coords[0]
x2, y2 = beacon_coords[1]
x3, y3 = beacon_coords[2]
d1, d2, d3 = distances
# 三角定位方程组求解(基于最小二乘法)
A = 2 * (x2 - x1)
B = 2 * (y2 - y1)
C = d1**2 - d2**2 - x1**2 + x2**2 - y1**2 + y2**2
D = 2 * (x3 - x2)
E = 2 * (y3 - y2)
F = d2**2 - d3**2 - x2**2 + x3**2 - y2**2 + y3**2
# 解二元一次方程组 Ax + By = C;Dx + Ey = F
denominator = A * E - B * D
if denominator == 0:
return (0, 0) # 信标共线,无法解算
x = (C * E - B * F) / denominator
y = (A * F - C * D) / denominator
return (round(x, 2), round(y, 2))
# ===================== 4. KNN优化精度(动态指纹库) =====================
def knn_optimize(raw_coords, fingerprint_data, k=3):
"""
用K近邻优化原始定位结果(基于场景指纹库)
:param raw_coords: 三角定位原始坐标 (x, y)
:param fingerprint_data: 指纹库 [ (x1,y1,rssi1,rssi2,rssi3), ... ]
:param k: 近邻数
:return: 优化后坐标 (x, y)
"""
# 提取特征(RSSI)和标签(真实坐标)
X = np.array([[d[2], d[3], d[4]] for d in fingerprint_data])
y = np.array([[d[0], d[1]] for d in fingerprint_data])
# 训练KNN模型
knn = KNeighborsRegressor(n_neighbors=k)
knn.fit(X, y)
# 假设原始定位时的RSSI数据(需从实际采集的RSSI传入)
# 此处示例:取指纹库中最接近原始坐标的RSSI特征
rssi_features = np.array([[
fingerprint_data[np.argmin([math.hypot(d[0]-raw_coords[0], d[1]-raw_coords[1]) for d in fingerprint_data])][2],
fingerprint_data[np.argmin([math.hypot(d[0]-raw_coords[0], d[1]-raw_coords[1]) for d in fingerprint_data])][3],
fingerprint_data[np.argmin([math.hypot(d[0]-raw_coords[0], d[1]-raw_coords[1]) for d in fingerprint_data])][4]
]])
# 预测优化后的坐标
optimized_coords = knn.predict(rssi_features)[0]
return (round(optimized_coords[0], 2), round(optimized_coords[1], 2))
# ===================== 5. 完整流程测试 =====================
if __name__ == "__main__":
# 步骤1:模拟终端实测3个信标的RSSI值(实际场景需硬件采集)
measured_rssi = {"beacon1": -65, "beacon2": -70, "beacon3": -68}
# 步骤2:RSSI转距离
distances = []
beacon_coords = []
for beacon_name, params in beacons.items():
beacon_coords.append((params["x"], params["y"]))
distance = rssi_to_distance(measured_rssi[beacon_name], params["rssi_1m"])
distances.append(distance)
print(f"信标距离估算:{distances} 米")
# 步骤3:三角定位解算原始坐标
raw_x, raw_y = trilateration(beacon_coords, distances)
print(f"三角定位原始坐标:({raw_x}, {raw_y})")
# 步骤4:KNN优化(模拟场景指纹库,实际需提前采集)
# 指纹库格式:[(真实x, 真实y, 信标1RSSI, 信标2RSSI, 信标3RSSI), ...]
fingerprint_db = [
(1.2, 1.5, -64, -71, -67),
(1.0, 1.3, -65, -70, -68),
(0.8, 1.1, -66, -69, -69),
(5.0, 4.3, -55, -58, -56),
(5.2, 4.5, -54, -59, -57)
]
optimized_x, optimized_y = knn_optimize((raw_x, raw_y), fingerprint_db)
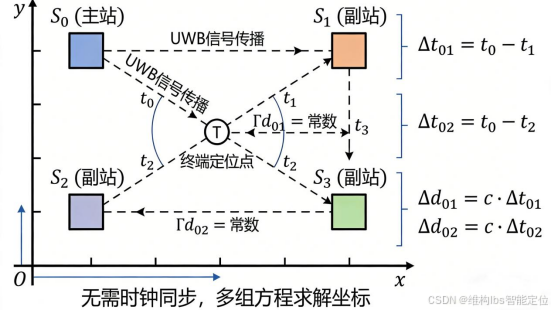
print(f"KNN优化后坐标:({optimized_x}, {optimized_y})")2.TDOA定位算法(UWB核心的高精度方案)
核心逻辑:终端发送信号,二维定位需 3 个基站,三维定位需 4 个基站,计算信号到达不同基站的"时间差",通过多组时间差建立方程,求解终端坐标(无需终端与基站同步时钟,是UWB的主流方案)。
3.AoA定位算法(蓝牙AoA/UWB辅助,角度定位)
核心逻辑:通过天线阵列测量信号相位差推导入射角度,线阵支持一维角度定位,矩形阵 / 圆阵可实现二维角度定位,结合2个以上基站的角度信息,交叉定位终端坐标(精度高于RSSI,低于TDOA)。
三、主流室内定位无线技术的选型指南(避免踩坑,匹配场景需求)
选型的核心是"精度需求-场景特性-成本预算"三者的平衡,以下是常见场景的选型建议:
1.民用场景(低成本、易部署)
需求:精度1-5米,无需专用硬件,快速落地。
推荐:蓝牙BLE(RSSI模式)、wi-fi定位。
案例:商场导购、展馆导航、小区访客定位,传统 Wi-Fi RSSI 精度有限,若需提升精度且已有兼容路由器,可采用 "Wi-Fi FTM" 作为高精度低成本备选,适用于已部署支持 FTM 功能路由器的写字楼、机场等场景。
2.工业场景(高精度、抗干扰)
需求:精度0.1-1米,抗金属/墙体遮挡,支持高速移动。
推荐:UWB(TDOA模式)、蓝牙AoA。无需厘米级精度时,优先选蓝牙 AoA 而非 UWB,可降低 50% 以上部署成本。
案例:工业AGV导航、矿井人员定位、车间设备追踪。
3.资产盘点场景(低成本、批量识别)
需求:区域级定位(无需精准坐标),标签成本极低,支持批量读取。
推荐:无源RFID。
案例:图书馆书籍盘点、商超货物管理、企业固定资产盘点。
3.特殊场景( 无 射频干扰、密闭空间)
需求:无射频辐射,抗电磁干扰,小空间定位。
推荐:可见光VLC、超声波。
案例:医院手术室、加油站、地下管廊。
当然在行业落地上,多技术融合、硬件复用化、AI优化精度、轻量化部署已成为趋势,室内定位无线技术,已实现了空间感知、资产追踪、人员管理的核心价值,选择技术时,无需盲目追求精度,而是要匹配场景的核心需求。
希望本篇对大家有所帮助~点击下方可获取解决方案↓↓↓↓↓↓↓