核心原理------搞懂"电调如何工作"。
这个阶段的目标是,从"是什么"深入到"怎么工作",理解电调内部的运行逻辑,为后续的选型、调试和故障排查打下坚实的理论基础。
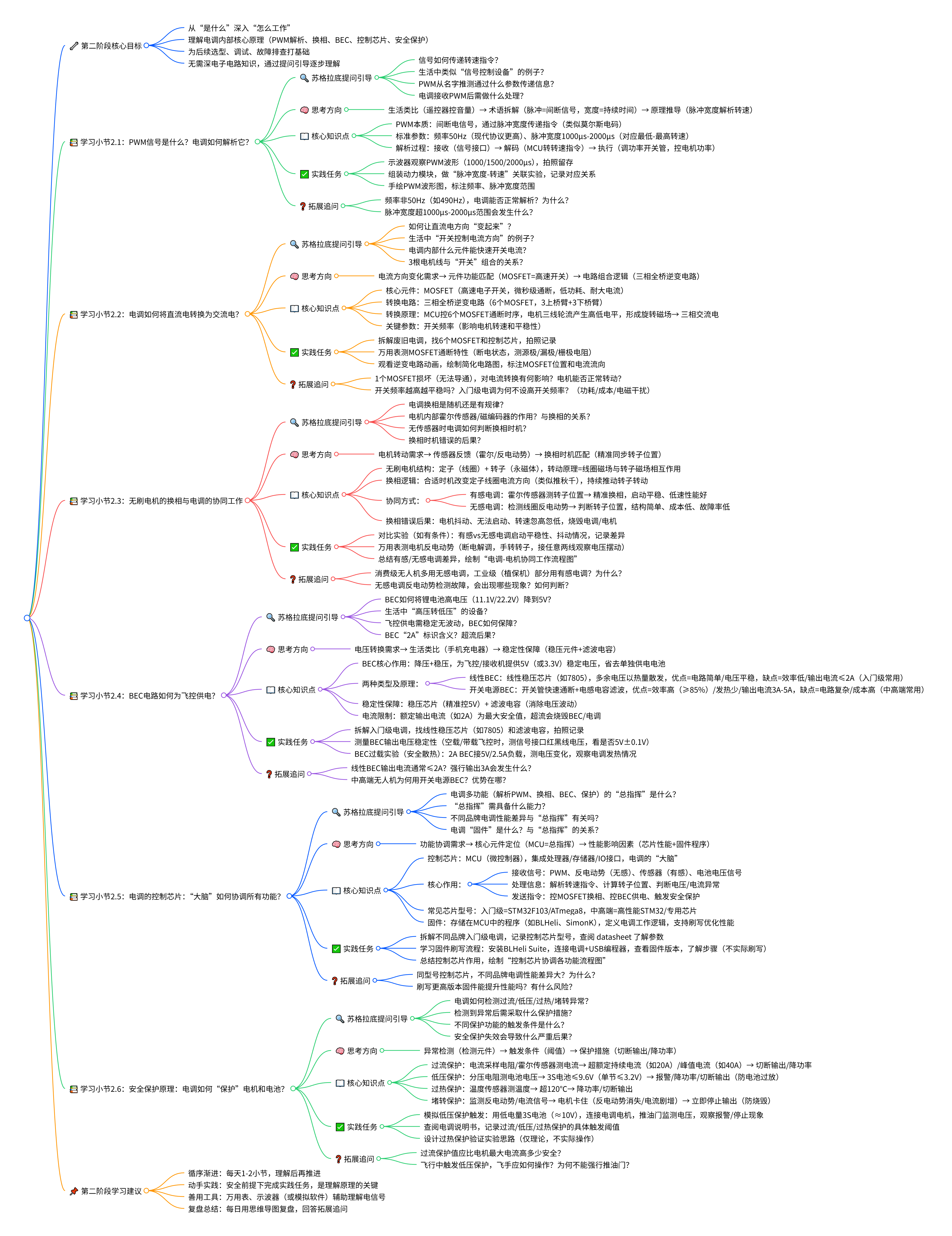
第二阶段:核心原理------搞懂"电调如何工作"(第4-10天)
核心目标:从"是什么"深入到"怎么工作",理解电调的内部核心原理(如PWM信号解析、换相原理、BEC工作原理),为后续选型、调试打下基础。本阶段需要少量电子电路基础概念,将通过提问引导逐步理解,无需恐惧。
| 学习小节 | 苏格拉底提问引导 | 思考方向 | 核心知识点(通俗易懂版) | 实践任务 | 拓展追问 |
|---|---|---|---|---|---|
| 2.1 先搞懂基础:PWM信号是什么?电调如何解析它? | 1. 上一阶段提到"电调通过接收飞控的PWM信号控制电机转速",你觉得"信号"是如何传递"转速指令"的? 2. 生活中有没有类似"用信号控制设备运行"的例子?(提示:遥控器控制电视音量) 3. PWM是"脉冲宽度调制"的缩写,从名字推测,它可能通过什么参数来传递信息? 4. 电调接收PWM信号后,需要做什么处理才能控制电机转速? | 从"生活类比→术语拆解→原理推导":先通过生活中"遥控器控音量"的例子理解"信号传递指令"的逻辑,再拆解"脉冲宽度调制"的含义(脉冲=间断的信号,宽度=信号持续时间),最后推导电调如何通过"脉冲宽度"解析转速指令。 | 1. PWM信号的本质 :一种"间断的电信号",通过"脉冲宽度"(信号持续的时间)来传递控制指令,类似"莫尔斯电码"(通过长短信号传递信息)。 2. 无人机PWM信号的标准参数 : - 频率 :通常为50Hz(每秒传递50个脉冲),但现代协议频率更高。 - 脉冲宽度范围 :约1000μs-2000μs(μs=微秒,1秒=100万微秒)。 - 对应转速 :1000μs对应电机最低转速(或停止),2000μs对应电机最高转速,中间宽度对应中间转速(如1500μs=中等转速)。 3. 电调解析PWM信号的过程 : - 接收 :通过信号控制接口接收飞控发送的PWM脉冲。 - 解码 :内部的"微控制器(MCU)"识别脉冲宽度,将其转换为"转速指令"。 - 执行:根据转速指令,MCU调整对功率开关管的控制,从而改变输送给电机的等效电压和功率,最终控制电机转速。 | 1. 用示波器(或虚拟示波器APP,如"手机示波器")观察飞控输出的PWM信号 : - 连接:将示波器探头接电调信号控制接口的信号线(白/黄线),地线接黑线。 - 观察:记录1000μs、1500μs、2000μs时的脉冲波形,拍照留存。 2. 做"PWM信号与转速"的关联实验 : - 准备:电调+无刷电机+飞控+锂电池,组装基础动力模块。 - 操作:通过遥控器调整油门,观察电机转速变化,同时用示波器观察PWM信号宽度的变化,记录"脉冲宽度-转速"的对应关系。 3. 在笔记本上绘制PWM信号波形图,标注关键参数(频率、脉冲宽度范围)。 | 1. 如果PWM信号的频率不是50Hz(比如变成490Hz),电调还能正常解析转速指令吗?为什么? 2. 为什么PWM信号的脉冲宽度要限制在1000μs-2000μs?超出这个范围会发生什么? |
| 2.2 核心原理1:电调如何将直流电转换为交流电? | 1. 直流电的特点是"电流方向不变",交流电是"电流方向周期性变化",你觉得怎么才能让直流电的方向"变起来"? 2. 生活中有没有"通过开关控制电流方向"的例子?(提示:手电筒的开关控制亮灭,类似控制电流通断) 3. 电调内部可能有什么元件能实现"快速开关电流"? 4. 3根电机线对应3种电流方向变化,这和"开关"的组合有什么关系? | 从"电流方向变化需求→元件功能匹配→电路组合逻辑"推导:要让直流电方向变化,需要"快速控制电流通断的开关元件";电调内部用MOS管作为开关,通过多个MOS管的组合开关,实现直流电到交流电的转换。 | 1. 电调内部核心元件 :MOSFET(金属-氧化物-半导体场效应晶体管) ,相当于"高速电子开关",能在极短时间内(微秒级)实现通断,且功耗低、耐电流能力强。 2. 转换电路 :"三相全桥逆变电路",由6个MOSFET组成(3个上桥臂、3个下桥臂),对应电机的3根线。 3. 转换原理(通俗版) : - 微控制器(MCU)控制6个MOSFET的"通断顺序"和"通断时间"。 - 通过精确控制这6个开关的时序,在电机的三根线上轮流产生高电平、低电平或断开的状态,从而形成旋转磁场,驱动电机转子。 - 这个过程将电池的直流电转换成了驱动无刷电机所需的三相交流电。 4. 关键参数:"开关频率"(MOSFET切换通断的频率),直接影响电机的转速和运行平稳性。 | 1. 拆解1个废旧入门级电调,观察内部结构 : - 找到6个MOSFET(通常是黑色小方块,有3个引脚),记录其位置和数量。 - 找到控制芯片(通常是较大的黑色芯片,有多个引脚),拍照留存。 2. 用万用表测量MOSFET的通断状态(断电状态下) : - 测量MOSFET的源极、漏极、栅极之间的电阻,记录通断情况。 - 了解"MOSFET导通时电阻极小,断开时电阻极大"的特性。 3. 观看"三相全桥逆变电路工作动画",在笔记本上绘制电路简化图,标注6个MOSFET的位置和电流流向。 | 1. 如果电调内部的1个MOSFET损坏(无法导通),会对电流转换产生什么影响?电机还能正常转动吗? 2. 开关频率越高,电机的运行越平稳吗?为什么入门级电调不把开关频率设得很高?(提示:功耗、成本、电磁干扰) |
| 2.3 核心原理2:无刷电机的换相与电调的协同工作 | 1. 上一节提到电调通过6个MOSFET切换电流方向,你觉得电调是"随机切换"还是"有规律切换"? 2. 无刷电机内部有"霍尔传感器"或"磁编码器",它们的作用是什么?和电调的换相有什么关系? 3. 如果电机内部没有传感器,电调还能知道什么时候该换相吗? 4. 电调的换相时机如果错了,会发生什么? | 从"电机转动需求→传感器反馈→换相时机匹配"推导:电机要持续、平稳转动,电调的换相必须和电机内部的转子位置同步;传感器的作用是"检测转子位置",并把信息反馈给电调,让电调精准把握换相时机。 | 1. 无刷电机的核心结构 :定子(固定部分,有线圈)、转子(转动部分,有永磁体);电机转动的原理是"线圈通电产生磁场,与转子永磁体的磁场相互作用,推动转子转动"。 2. 换相的核心逻辑 :要让转子持续转动,必须在"合适的时机"改变定子线圈的电流方向,使磁场始终推动转子转动(类似"推秋千",要在秋千到最高点时推)。 3. 电调与电机的协同方式(两种类型) : - 有感电调 :电机内部有霍尔传感器,实时检测转子位置,将位置信号反馈给电调;电调根据位置信号,精准控制换相时机。优点:启动平稳、低速性能好,适合云台电机、精准控制场景。 - 无感电调 :电机内部无传感器,电调通过"检测电机线圈的反电动势"(电机转动时线圈产生的反向电压)来判断转子位置。优点:结构简单、成本低、故障率低,适合大多数消费级无人机。 4. 换相错误的后果:电机抖动、无法启动、转速忽高忽低,严重时烧毁电调或电机。 | 1. 对比实验:有感电调vs无感电调的启动性能(如有条件) : - 准备:有感电调、无感电调各1个,相同型号无刷电机1个,锂电池、飞控。 - 操作:分别连接两种电调与电机,在低速状态下启动电机,观察启动的平稳性、抖动情况,记录差异。 2. 用万用表测量电机的反电动势(演示原理) : - 操作:断开电调与电机的连接,用手快速转动电机转子。 - 观察:将万用表调至直流电压档,接电机的任意两根线,观察指针或数值的摆动,理解"反电动势反映转子位置"的原理。 3. 在笔记本上总结有感电调和无感电调的差异,绘制"电调-电机协同工作流程图"。 | 1. 为什么消费级无人机大多用无感电调,而工业级无人机(如植保机)部分用有感电调? 2. 如果无感电调的"反电动势检测功能"故障,会出现哪些现象?如何判断? |
| 2.4 核心原理3:BEC电路如何为飞控供电? | 1. 上一阶段提到"电调的BEC功能为飞控提供5V稳定电压",而锂电池的电压是11.1V(3S)或22.2V(6S),你觉得BEC是如何把高电压降到5V的? 2. 生活中有没有"高压转低压"的设备?(提示:手机充电器,将220V市电转为5V/9V) 3. 飞控对供电的要求是"稳定、无波动",BEC如何保证输出电压的稳定性? 4. BEC的"2A"标识是什么意思?如果连接的设备总电流超过2A,会发生什么? | 从"电压转换需求→生活类比→稳定性保障"推导:BEC的核心是"降压电路",类似手机充电器;要保证电压稳定,需要"稳压元件";输出电流限制是为了避免BEC过载烧毁。 | 1. BEC的核心作用 :"降压+稳压",将锂电池的高电压(如11.1V)转换为飞控、接收机等小功率部件需要的5V(或3.3V)稳定电压,同时为这些部件供电,省去单独供电的电池。 2. BEC的两种类型及原理 : - 线性BEC :通过"线性稳压芯片"(如7805芯片)实现降压,原理是"将多余的电压以热量形式散发掉"。优点:电路简单、成本低、输出电压平稳;缺点:效率低(电压差越大,发热越严重)、输出电流小(通常≤2A);入门级电调多采用线性BEC。 - 开关电源BEC(SMPS BEC) :通过"开关管"快速通断,将高电压转换为高频脉冲,再通过电感、电容滤波,得到稳定的低电压。优点:效率高(≥85%)、发热少、输出电流大(可达3A-5A);缺点:电路复杂、成本高;中高端电调多采用。 3. 稳定性保障 :BEC内部包含"稳压芯片"和"滤波电容",稳压芯片负责将电压精准控制在5V,滤波电容负责消除电压波动(类似"蓄水池",稳定水流)。 4. 电流限制:BEC的额定输出电流(如2A)是最大安全电流,若连接的设备(飞控+接收机+LED灯等)总电流超过2A,会导致BEC过热烧毁,甚至影响电调主体功能。 | 1. 拆解入门级电调,找到BEC电路部分 : - 找到线性稳压芯片(如7805,通常有3个引脚,标注"7805")和滤波电容(圆柱形,有正负极),拍照记录。 2. 测量BEC的输出电压和稳定性 : - 连接:电调动力输入接口接锂电池,信号控制接口的红线和黑线接万用表(红笔接红线,黑笔接黑线)。 - 测量:记录空载时(不接飞控)和带载时(接飞控)的电压值,观察是否稳定在5V±0.1V。 3. 做BEC过载实验(注意安全,做好散热) : - 准备:2A BEC电调1个,5V/2.5A负载(如多个LED灯串联)。 - 操作:将负载接BEC输出端,测量电压变化,观察电调是否发热,记录过载时的现象(如电压下降、电调发烫)。 | 1. 为什么线性BEC的输出电流通常≤2A?如果强行让它输出3A,会发生什么? 2. 中高端无人机为什么采用开关电源BEC?和线性BEC相比,优势体现在哪里? |
| 2.5 电调的控制芯片:"大脑"如何协调所有功能? | 1. 电调有很多功能:解析PWM信号、控制MOSFET换相、BEC供电、安全保护,这些功能需要一个"总指挥"来协调,你觉得这个"总指挥"是什么? 2. 这个"总指挥"需要具备什么能力?(提示:接收信号、处理信息、发送指令) 3. 不同品牌的电调性能差异,是否和这个"总指挥"的性能有关? 4. 电调的"固件"是什么?和"总指挥"有什么关系? | 从"功能协调需求→核心元件定位→性能影响因素"推导:电调的"控制芯片"是核心指挥元件,负责协调所有功能;芯片性能和固件程序直接决定电调的响应速度、稳定性等性能。 | 1. 电调的"大脑" :微控制器(MCU) ,是一块集成了处理器、存储器、输入/输出接口的微型芯片,相当于电调的"总指挥"。 2. 控制芯片的核心作用 : - 接收输入信号 :PWM控制信号、电机反电动势信号(无感电调)、传感器信号(有感电调)、电池电压信号。 - 处理信息 :解析PWM信号得到转速指令、计算电机转子位置、判断电池电压是否过低、检测电流是否过载。 - 发送控制指令 :控制MOSFET的通断顺序和时间(换相)、控制BEC电路的供电、触发安全保护机制(如过载时切断输出)。 3. 常见控制芯片型号 :入门级电调多采用STM32系列(如STM32F103)、ATmega系列(如ATmega8),中高端电调采用性能更强的STM32系列或专用芯片。 4. 电调固件:存储在控制芯片存储器中的程序,相当于"大脑的思维逻辑",定义了电调解析信号、控制换相、实现保护功能的具体方式;不同固件的电调,性能差异明显(如响应速度、平稳性),部分电调支持刷写固件(如BLHeli、SimonK固件)优化性能。 | 1. 拆解不同品牌的入门级电调,找到控制芯片 : - 观察芯片上的型号标识(如"STM32F103"),记录不同品牌电调的芯片型号。 - 查阅芯片 datasheet(数据手册),了解其基本参数(如处理器频率、存储器容量)。 2. 了解电调固件的刷写过程 : - 准备:支持刷写固件的电调(如BLHeli电调)、USB编程器、电脑。 - 操作:安装刷写软件(如BLHeli Suite),连接电调和编程器,查看当前固件版本,学习刷写固件的基本步骤(不实际刷写,重点了解流程)。 3. 在笔记本上总结控制芯片的核心作用,绘制"控制芯片协调各功能的流程图"。 | 1. 为什么同型号的控制芯片,不同品牌的电调性能差异很大? 2. 刷写更高版本的固件,能提升电调的性能吗?有什么风险? |
| 2.6 安全保护原理:电调如何"保护"电机和电池? | 1. 上一阶段提到电调有过流、低压、过热、堵转保护功能,你觉得电调是如何"检测"到这些异常情况的? 2. 检测到异常后,电调应该采取什么措施才能避免损坏部件? 3. 不同保护功能的"触发条件"是什么?(比如多少电压算低压,多少电流算过流) 4. 如果电调的安全保护功能失效,会导致什么严重后果? | 从"异常检测→触发条件→保护措施"推导:电调通过各种"检测元件"(如电流传感器、电压传感器、温度传感器)获取异常信号,由控制芯片判断是否触发保护,再执行相应的保护措施(如切断输出、降功率)。 | 1. 过流保护原理 : - 检测 :电调内部串联"电流采样电阻"或使用霍尔电流传感器,电流通过时会产生电压降,控制芯片通过测量电压降计算实际电流。 - 触发条件 :实际电流超过电调的额定持续电流(如20A),或瞬间峰值电流超过额定峰值电流(如40A)。 - 保护措施 :立即切断电机输出,或降低输出功率,避免MOSFET和电机烧毁。 2. 低压保护原理 : - 检测 :控制芯片通过分压电阻测量锂电池的电压。 - 触发条件 :电压低于设定值(如3S电池的保护电压是9.6V,单节锂电池电压低于3.2V)。 - 保护措施 :发出报警信号(如电机间歇性停转),或逐步降低输出功率,最终切断输出,避免锂电池过放损坏。 3. 过热保护原理 : - 检测 :电调内部的控制芯片或MOSFET附近装有"温度传感器",实时检测温度。 - 触发条件 :温度超过设定阈值(如120℃)。 - 保护措施 :降低输出功率,减少发热,若温度持续升高则切断输出。 4. 堵转保护原理 : - 检测 :在电机启动或运行中,控制芯片监测反电动势信号或电流信号。若电机被卡住(堵转),反电动势消失或电流急剧上升。 - 触发条件 :检测到电机长时间无法正常换相或电流异常高。 - 保护措施:立即停止输出,防止电机和电调因大电流而烧毁。 | 1. 模拟低压保护触发 : - 准备:电调、电机、一块电量较低的3S锂电池(电压约10V)、万用表。 - 操作:连接好系统,缓慢推油门让电机转动,同时用万用表监测电池电压。观察当电压降至保护阈值附近时,电调和电机是否有报警提示(如电机发出特定响声)或停止工作。 2. 查阅电调说明书 :找到你所用电调的过流、低压、过热保护的具体触发阈值,记录在笔记本上。 3. 思考实验:设计一个简单的实验思路,来验证电调的过热保护功能(注意:此实验有风险,仅做理论设计,不实际操作)。 | 1. 电调的过流保护值应该设置得比电机最大电流高多少比较安全? 2. 如果无人机在飞行中触发低压保护,飞手应该如何操作?为什么不能强行推油门? |
第二阶段学习建议:
- 循序渐进:每天学习1-2个小节,确保完全理解后再进入下一节。
- 动手实践:实践任务是理解原理的关键,务必在安全的前提下完成。
- 善用工具:万用表、示波器(或模拟软件)是理解电信号的好帮手。
- 复盘总结:每天学习结束后,尝试用思维导图复盘当天内容,并回答"拓展追问"中的问题。
完成本阶段学习后,你将不再是一个只知"电调是什么"的菜鸟,而是一个初步理解其内部工作原理的"准专家"。接下来,我们将进入第三阶段:选型与匹配------如何为无人机选择合适的电调,将理论应用于实践。