
摘要
随着机器人技术在工业生产、医疗救援、户外勘探等领域的广泛应用,续航能力与供电稳定性成为制约机器人作业效能的关键因素。多备用电池与主电池的不断电切换管理模块,通过优化电源拓扑结构、精准控制切换时序、实时监测电池状态,实现主备电池间无间断供电切换,有效延长机器人续航时间,避免供电中断导致的作业失败或设备损坏。本文系统阐述该管理模块的核心工作原理,包括电源拓扑设计、切换控制机制、电池状态监测与均衡管理,结合典型应用场景分析模块的实践价值,并展望未来技术发展趋势,为机器人电源系统的优化设计提供理论参考与实践借鉴。
关键词
机器人;备用电池;主电池;不断电切换;电源管理模块;供电稳定性
一、引言
机器人作为自动化技术的核心载体,其作业范围已从结构化工厂环境拓展至复杂动态的户外场景、精密操作的医疗场景等。在长时间连续作业需求下,单一电池的续航能力难以满足实际需求,而传统电池更换方式需中断机器人运行,不仅降低作业效率,还可能导致关键数据丢失或作业流程中断。例如,工业巡检机器人若在高压设备巡检中因供电中断停机,可能错过设备故障预警时机;医疗手术机器人的供电中断则直接威胁患者生命安全。
多备用电池与主电池的不断电切换管理模块,通过构建主备互补的供电架构,在主电池电量不足、故障或需要维护时,无缝切换至备用电池供电,实现 "充电 - 放电 - 切换" 的闭环管理。该模块不仅解决了机器人续航瓶颈,还提升了供电系统的可靠性与容错能力,成为高端机器人电源系统的核心组成部分。本文基于电力电子技术、自动控制理论与电池管理技术,深入剖析模块的工作原理,并结合实际应用场景验证其有效性。
二、不断电切换管理模块的核心工作原理
不断电切换管理模块的核心目标是在主备电池切换过程中,保证负载端电压连续、无明显波动,同时实现电池状态的实时监测与智能调度。其工作原理主要包括电源拓扑结构设计、切换控制机制、电池状态监测与均衡管理三部分。
(一)电源拓扑结构设计
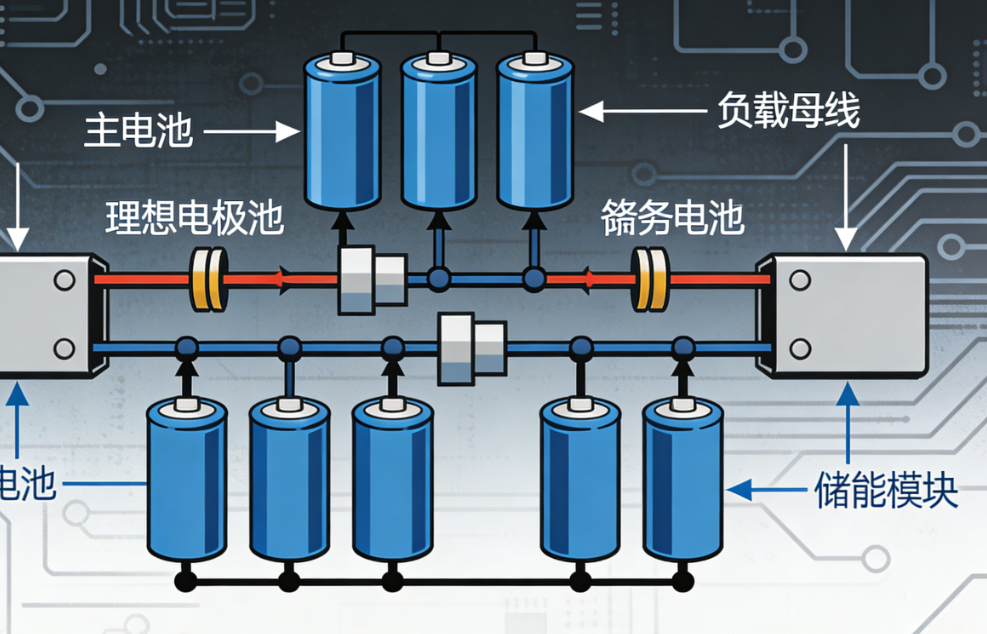
电源拓扑是实现不断电切换的硬件基础,核心在于构建 "主电池 - 备用电池 - 负载" 的冗余供电路径,并通过功率器件保障切换过程中的电能连续供应。典型的拓扑结构主要包括并联冗余拓扑与切换开关拓扑结合的形式,具体设计如下:
- 主备电池并联架构:主电池与备用电池通过各自的单向导通器件(如理想二极管、MOSFET)并联连接至负载母线。理想二极管或 MOSFET 的作用是防止电池之间的反向电流,确保主电池供电时备用电池不放电,同时在切换过程中快速导通备用电池回路。该架构的优势在于切换路径短,响应速度快,可有效降低切换过程中的电压跌落。
- 辅助电源缓冲电路:为进一步减小切换瞬间的电压波动,在负载母线两端并联电容储能模块与辅助电源缓冲电路。电容储能模块可在切换间隙释放电能,维持母线电压稳定;辅助电源(如超级电容、小型锂电池)则在主备电池切换的毫秒级间隙提供补充供电,确保负载端无断电感知。
- 功率器件选型:切换过程中功率器件的导通与关断速度直接影响切换效果,因此需选用低导通电阻、高开关频率的 MOSFET 或 IGBT 作为核心开关器件。同时,为避免开关器件的误触发,需配置驱动电路与过压、过流保护电路,确保功率器件的安全工作。
(二)切换控制机制
切换控制机制是模块的 "大脑",负责根据电池状态、负载需求等信号,精准控制主备电池的切换时序,实现无间断供电。其核心包括切换触发条件、切换时序控制与闭环反馈调节三部分:
- 切换触发条件:触发主备切换的信号主要来自电池状态监测单元与外部控制指令。常见的触发条件包括:主电池剩余电量(SOC)低于设定阈值(如 20%);主电池出现过压、过流、过热等故障;用户发出手动切换指令;负载功率突变导致主电池供电不足。为避免频繁切换,需设置滞回阈值,例如主电池 SOC 回升至 30% 以上时,才切换回主电池供电。
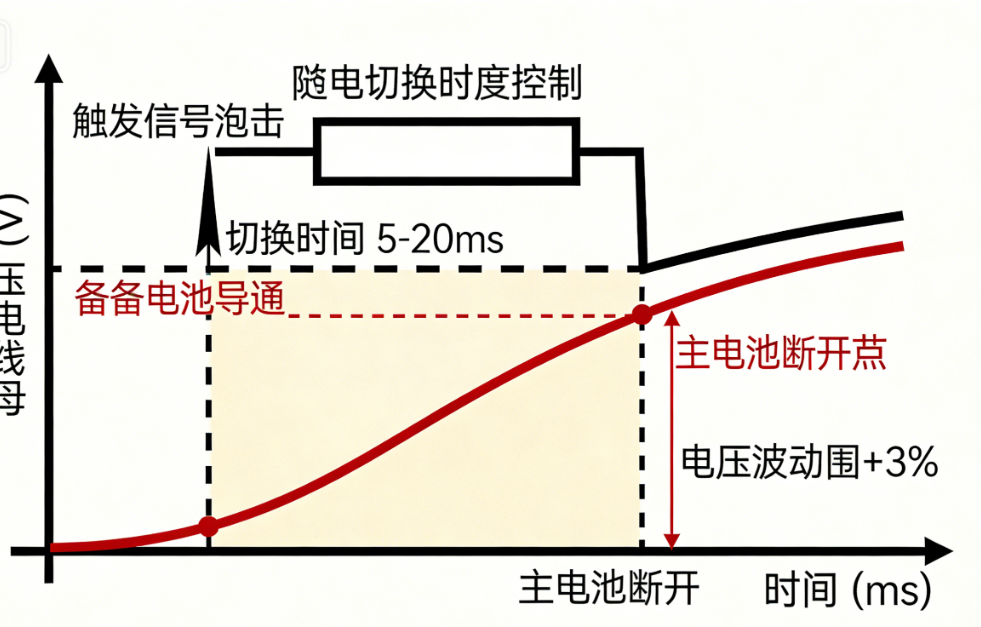
- 切换时序控制:切换时序采用 "先通后断" 的原则,即先导通备用电池的供电回路,待备用电池稳定接入负载母线后,再断开主电池的供电回路。该时序可确保负载母线始终有电源供电,避免切换间隙的断电。具体过程为:控制单元接收到切换触发信号后,首先驱动备用电池回路的 MOSFET 导通,通过电压采样电路检测母线电压是否稳定;当母线电压波动小于设定值(如 ±5%)时,驱动主电池回路的 MOSFET 关断,完成切换。整个切换过程的时间需控制在毫秒级(通常 5-20ms),确保负载端无明显感知。
- 闭环反馈调节:为应对负载功率变化与电池状态波动,切换控制单元通过闭环反馈机制实时调节切换参数。例如,当负载功率增大时,提前导通备用电池,避免主电池因过载导致电压跌落;通过监测电池内阻变化,动态调整切换阈值,确保电池在最佳状态下工作。
(三)电池状态监测与均衡管理

电池状态监测(BMS)是实现智能切换与电池保护的前提,而均衡管理则保障多备用电池的一致性,延长电池组整体寿命。
- 电池状态监测:监测单元通过电压、电流、温度传感器,实时采集主备电池的关键参数,包括剩余电量(SOC)、健康状态(SOH)、端电压、充放电电流、电池温度等。SOC 估算采用安时积分法结合开路电压校准,确保估算精度;SOH 通过电池内阻、容量衰减率等参数评估,及时预警老化电池。监测数据实时传输至控制单元,为切换决策提供依据。
- 电池均衡管理:多备用电池在长期充放电过程中,由于电池单体的一致性差异,可能出现电量不均衡现象,影响整体供电效率与电池寿命。均衡管理模块通过被动均衡或主动均衡方式,调节各电池单体的充放电电流:被动均衡采用电阻放电,将电压过高的单体电量通过电阻消耗;主动均衡则通过电感、电容等储能元件,将高电压单体的电量转移至低电压单体,均衡效率更高,适用于大容量电池组。
三、不断电切换管理模块的典型应用场景
不断电切换管理模块凭借其高可靠性、长续航、无间断供电的优势,已广泛应用于各类对供电稳定性要求严苛的机器人领域,以下为典型应用场景分析:
(一)工业巡检机器人
工业巡检机器人需在高压变电站、化工园区、矿山等复杂环境中长时间连续作业,巡检周期通常为几小时至几十小时,且作业过程中不能中断。传统单一电池供电的机器人需频繁停机更换电池,不仅降低巡检效率,还可能遗漏设备故障点。
配置多备用电池不断电切换管理模块后,工业巡检机器人可实现 "边作业边切换电池":主电池供电时,备用电池处于待命状态,当主电池 SOC 低于阈值时,模块自动切换至备用电池供电,此时工作人员可更换耗尽的主电池,无需停机。例如,某变电站巡检机器人配置 3 组备用电池,通过切换管理模块实现 24 小时不间断巡检,巡检效率提升 60%,故障漏检率降低 80%。同时,模块的过压、过流保护功能可应对变电站复杂的电磁环境,确保机器人供电安全。
(二)医疗手术机器人
医疗手术机器人在微创手术、骨科手术等场景中,需具备极高的供电稳定性,供电中断哪怕是毫秒级,都可能导致手术器械失控,引发医疗事故。此外,手术过程中无法停机更换电池,因此对续航能力与切换平滑性要求极高。
不断电切换管理模块在医疗手术机器人中的应用,主要通过 "主电池 + 2 组以上备用电池" 的冗余架构,结合高精度切换控制,实现零感知切换。例如,某腹腔镜手术机器人采用主电池 + 2 组备用电池的设计,切换管理模块的切换时间小于 5ms,母线电压波动小于 ±3%,完全满足手术器械的工作要求。同时,模块的电池状态监测功能可实时显示电池剩余电量与健康状态,医生可提前预判电池更换时机,避免手术过程中出现意外。
(三)户外勘探与救援机器人
户外勘探机器人(如地质勘探、极地探测)与救援机器人(如地震救援、消防救援)需在无人区、恶劣环境中作业,续航时间与供电可靠性直接决定作业成败。此类场景下,电池可能面临低温、振动、冲击等极端条件,容易出现故障,因此需要切换管理模块具备强环境适应性与高容错能力。
在户外场景中,不断电切换管理模块通过以下方式保障供电:一是采用宽温域功率器件与电池保温技术,确保模块在 - 40℃~60℃环境中正常工作;二是配置多组备用电池,结合太阳能充电板,实现 "切换 - 充电" 循环,延长续航时间;三是具备故障自诊断功能,当某组备用电池故障时,自动屏蔽故障电池,切换至其他正常备用电池,提升系统容错性。例如,某极地探测机器人配置 4 组备用电池与太阳能充电模块,通过切换管理模块实现 72 小时不间断作业,成功完成极地冰盖地质数据采集。
(四)服务机器人
服务机器人(如酒店配送机器人、机场引导机器人)需在人流密集的公共场所长时间连续运行,供电中断会影响服务体验,甚至导致机器人 "瘫痪" 在通道中。此类机器人对切换的平滑性与电池的小型化要求较高。
不断电切换管理模块在服务机器人中的应用,采用小型化、集成化设计,将模块与电池组整合为一体,节省安装空间。同时,通过优化切换控制算法,确保切换过程中机器人的电机、传感器等设备正常工作,无卡顿或停机现象。例如,某酒店配送机器人配置 2 组备用电池,切换管理模块的体积仅为传统电源模块的 1/3,切换过程中机器人的行驶速度、导航精度无明显变化,单次充电可连续工作 12 小时,满足酒店全天服务需求。
四、技术挑战与发展趋势
(一)当前技术挑战
尽管不断电切换管理模块已取得广泛应用,但在极端环境适应性、切换效率、成本控制等方面仍面临挑战:一是在高温、低温、强电磁干扰等极端环境下,电池性能与功率器件稳定性下降,可能导致切换失败或电压波动过大;二是大容量电池组的切换过程中,电流冲击较大,容易损坏功率器件,且切换时间难以进一步缩短;三是高集成度、高精度的模块成本较高,限制了其在中低端机器人中的应用;四是多电池组的均衡管理效率有待提升,尤其是主动均衡技术的成本与复杂度较高。
(二)未来发展趋势
针对上述挑战,结合电力电子技术、电池技术与人工智能技术的发展,不断电切换管理模块将呈现以下发展趋势:
- 智能化升级:引入人工智能算法(如强化学习、神经网络),实现电池状态的精准预测与切换策略的自适应优化。例如,通过学习机器人的作业轨迹与负载变化规律,提前预判电池电量消耗速度,优化切换时机,减少不必要的切换。
- 高效化与小型化:采用宽禁带半导体材料(如碳化硅 SiC、氮化镓 GaN)替代传统硅基功率器件,降低器件导通电阻与开关损耗,提升切换效率,同时减小模块体积与重量;开发一体化集成方案,将电源拓扑、控制电路、电池管理单元整合为单一芯片,进一步提升集成度。
- 极端环境适配:优化模块的热设计与电磁兼容设计,采用耐高低温材料与防护结构,提升模块在极端环境下的可靠性;开发低温电池激活技术与高温散热技术,确保电池与模块在恶劣条件下正常工作。
- 低成本与通用化:通过规模化生产与技术简化,降低模块成本,推动其在中低端机器人中的普及;设计通用接口与标准化协议,实现模块与不同类型机器人、不同规格电池的兼容,提升通用性。
五、结论
机器人多备用电池与主电池的不断电切换管理模块,通过优化电源拓扑结构、精准控制切换时序、实时监测电池状态,实现了主备电池间的无间断供电切换,有效解决了机器人续航不足与供电中断的痛点。该模块的核心价值在于提升机器人的作业效率、可靠性与安全性,已在工业巡检、医疗手术、户外勘探、服务等多个领域得到成功应用。
当前,模块在极端环境适应性、切换效率、成本控制等方面仍面临挑战,但随着宽禁带半导体技术、人工智能算法、电池技术的不断进步,未来将朝着智能化、高效化、小型化、通用化的方向发展。不断电切换管理模块作为机器人电源系统的核心组成部分,其技术创新与应用拓展将为机器人技术的进一步普及与升级提供重要支撑,推动机器人在更多复杂场景中发挥更大价值。