目录
1.摘要
随着无人航空系统在城市低空的快速发展,安全高效的低空交通管理亟需突破。飞前四维航迹优化是实现冲突探测与消解、生成无冲突航迹的关键技术。针对单一冲突消解策略难以适配多类型冲突的问题,本文提出一种具有可解释性的自适应冲突消解决策框架,该框架采用双层优化结构:通过概率模型自适应选择冲突消解策略,并利用混合整数非线性规划对调度、速度调整与航迹重规划等策略参数进行联合优化。同时,引入改进的随机分形搜索算法,通过惩罚引导与探索---开发平衡机制提升求解效率与稳定性。
2.基于风险的4D航线与飞行冲突建模
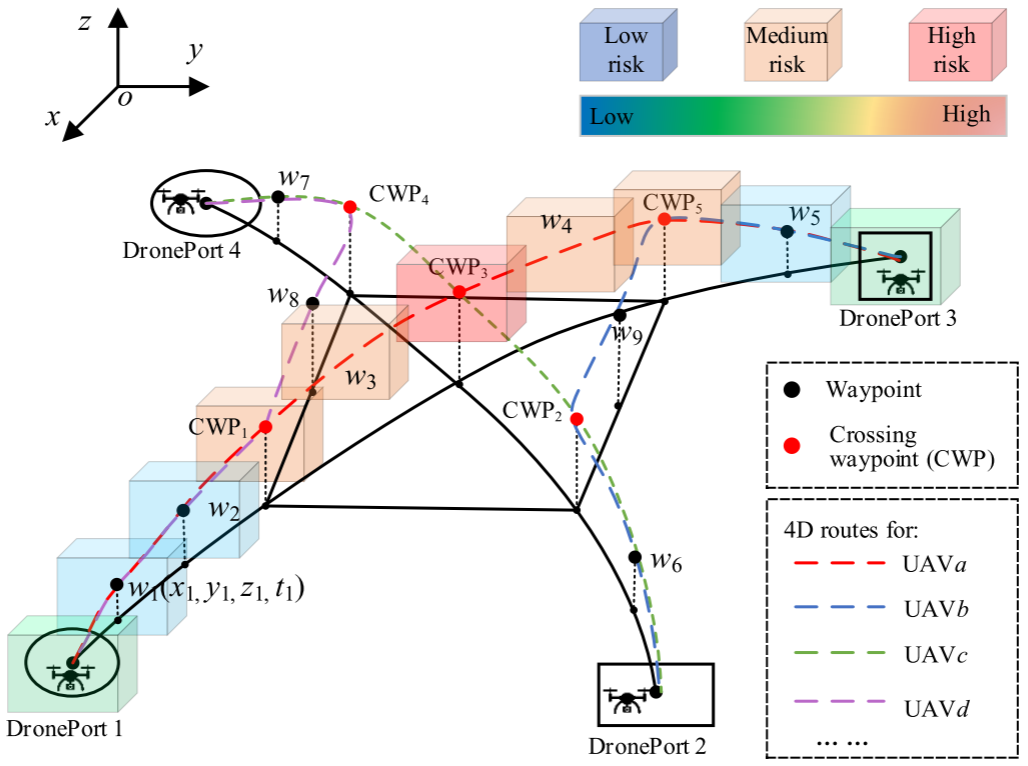
本文构建了基于风险的多无人机四维航迹建模与冲突检测方法,将航迹表示为包含空间与时间信息的离散航路点序列,并通过交叉航路点刻画潜在冲突。飞行冲突被定义为多架无人机在同一交叉点处到达时间间隔小于安全阈值的情况。在此基础上,通过联合优化航迹的空间与时间变量,采用自适应冲突消解策略,以降低冲突数量、第三方风险和运行成本,实现安全高效的飞前 4D 航迹优化。
3.冲突解决和4D路线优化
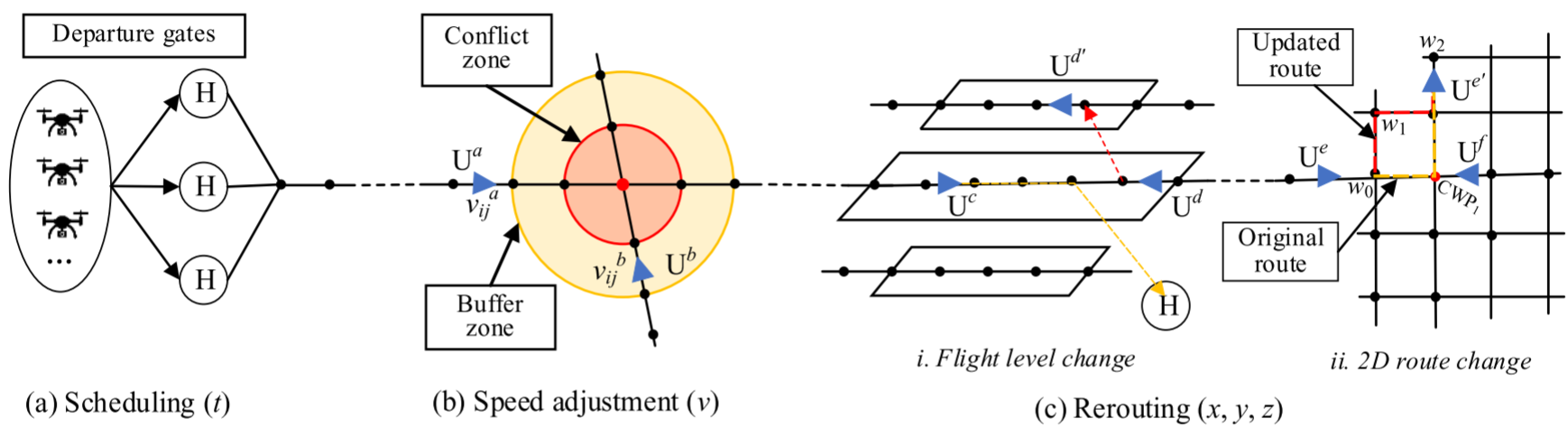
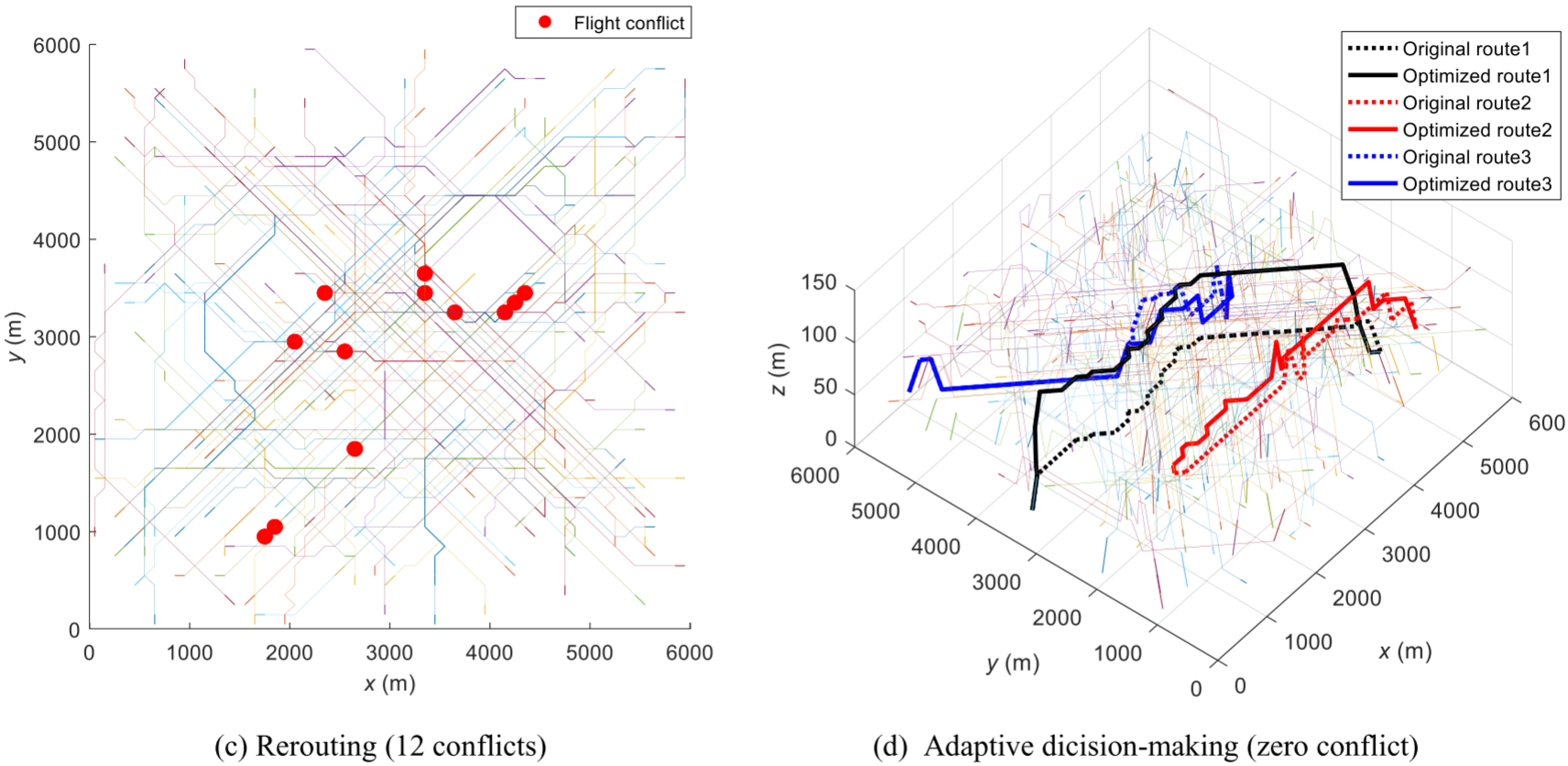
本文从时间与空间两个维度系统构建了多无人机飞行冲突消解策略,并提出面向 4D 航迹优化的决策框架。时间维策略包括起飞时刻调度与航段速度调整,通过改变 ETD 与 ETA 在全局或局部层面缓解冲突;空间维策略则通过航迹重规划实现冲突消解,包括飞行高度调整与二维航迹偏移,可有效应对时间策略难以解决的正面对向等冲突情形。
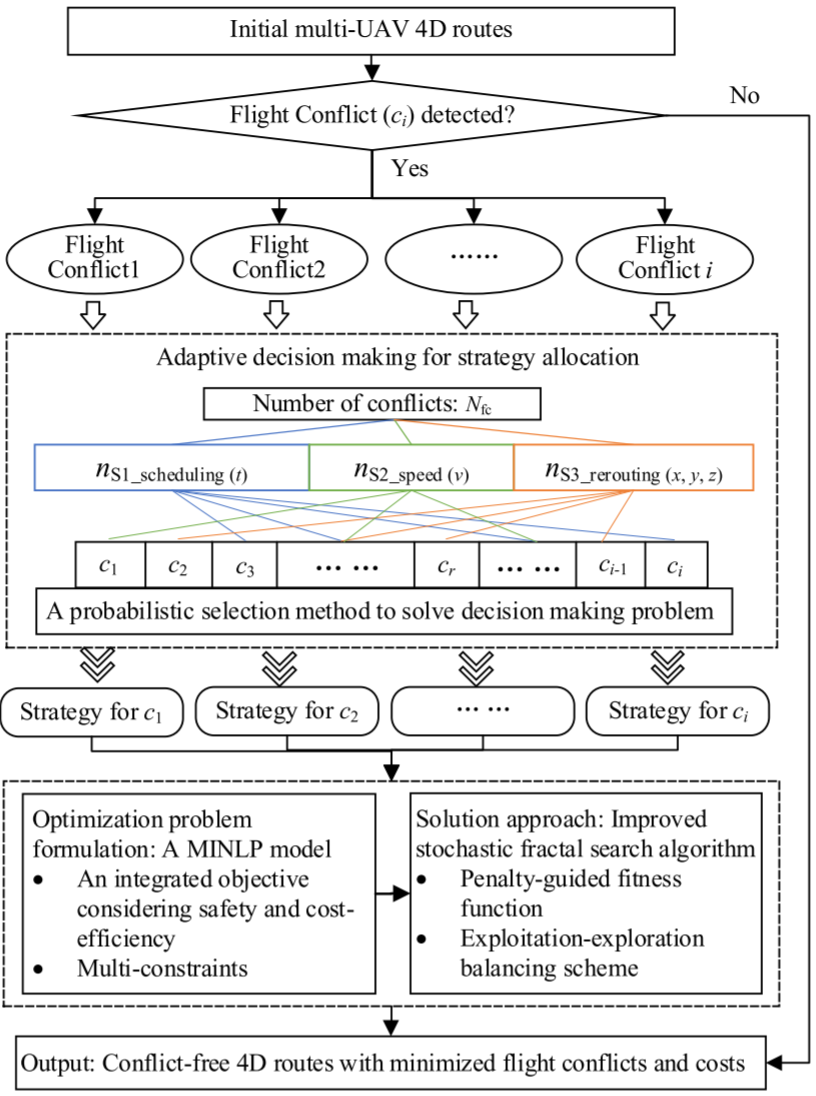
本文构建了一种面向多无人机 4D 航迹优化的双层决策框架。上层通过自适应决策机制为不同类型飞行冲突选择最优消解策略,下层基于混合整数非线性规划对航迹的空间与时间变量进行联合优化,并采用改进的随机分形搜索算法求解,该模型最小化第三方风险、飞行延误和运行成本为目标,在多重运行约束下生成安全、高效的无冲突 4D 航迹。
4.随机分形搜索算法
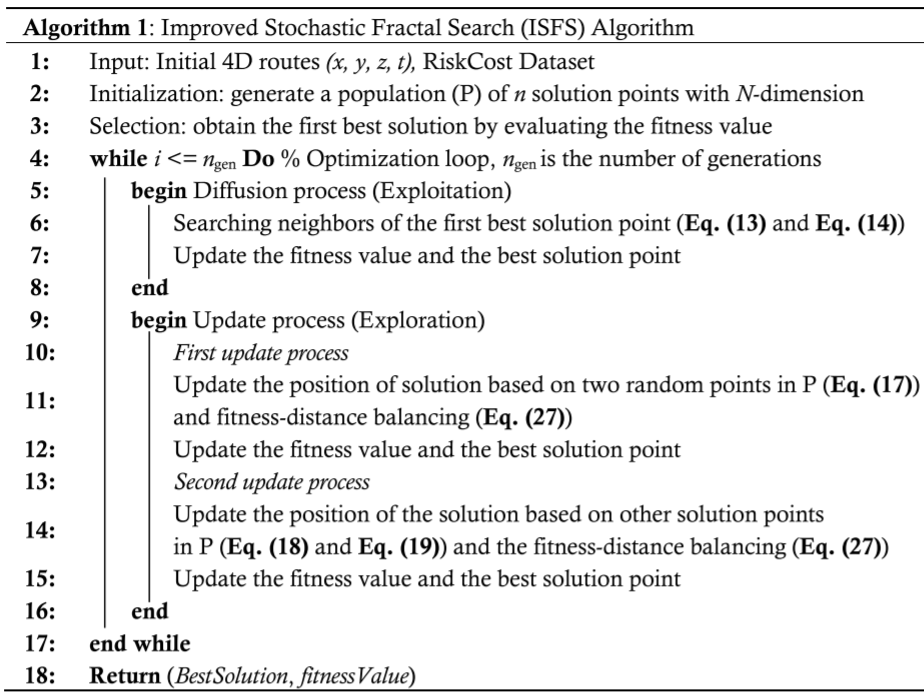
论文提出了一种结合惩罚引导适应度函数与探索---开发平衡机制改进随机分形搜索(ISFS)算法,用于高效求解多无人机 4D 航迹优化问题。在算法结构上,扩散过程侧重于局部开发,通过高斯随机游走在当前优解邻域内搜索;更新过程则增强全局探索能力,在保留优质解的同时维持解集多样性。
为突出飞行安全约束,论文将飞行冲突作为关键惩罚项引入适应度函数,对存在冲突的解施加强惩罚,引导搜索过程优先收敛至无冲突解空间。同时,论文引入基于适应度--距离平衡(FDB)的评分机制,在选择与更新过程中综合考虑解的质量与其相对于全局最优解的距离,有效避免粒子过度聚集导致的早熟收敛。
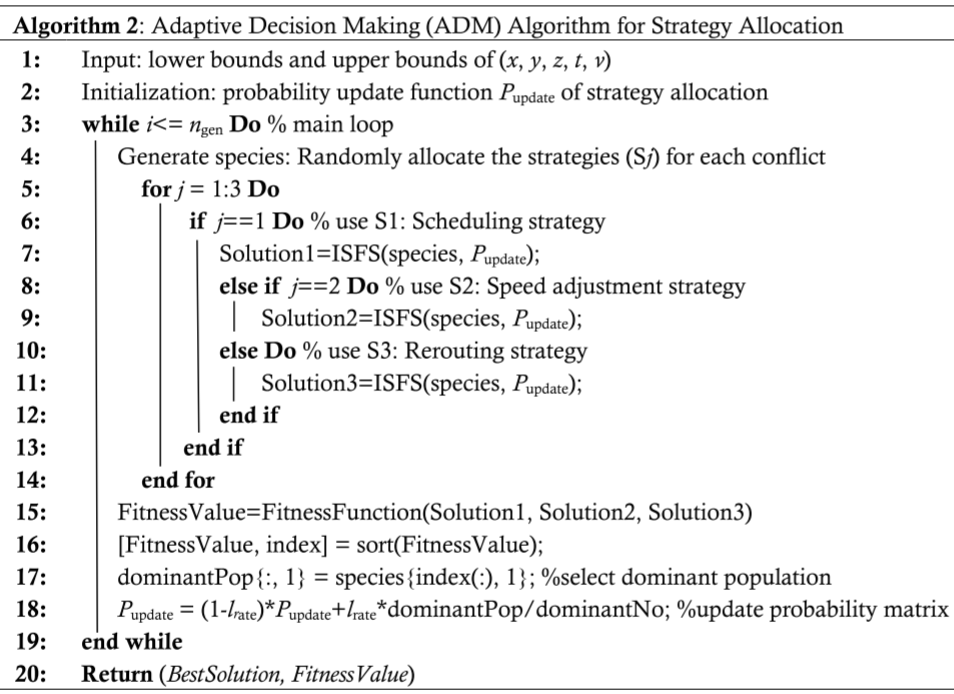
论文提出了一种基于ISFS的自适应决策机制(ADM)用于冲突消解策略分配,该方法通过概率模型迭代更新策略选择概率,在学习率控制下平衡历史经验利用与新策略探索,并结合 ISFS 对策略效果进行评估,从而逐步收敛至最优策略配置。
5.结果展示
6.参考文献
1 Pang B, Low K H, Lv C. Adaptive conflict resolution for multi-UAV 4D routes optimization using stochastic fractal search algorithmJ. Transportation Research Part C: Emerging Technologies, 2022, 139: 103666.
7.代码获取
xx
8.算法辅导·应用定制·读者交流
xx