在工业控制、汽车电子等 CANFD 总线应用场景中,节点数量直接影响系统覆盖范围与数据交互效率。节点数量并非无限制扩展,其受总线特性、硬件设计、协议配置等多重因素约束。本文将深入解析 CANFD 总线节点数量限制的核心原因,提供切实可行的扩展方案,并梳理科学的测试验证方法,为多节点系统设计提供技术支撑。
一、CANFD 总线节点数量的核心限制因素
CANFD 总线的节点扩展能力并非由单一因素决定,而是硬件特性、总线参数与拓扑结构共同作用的结果:
总线负载容限:CANFD 总线的显性电平驱动能力有限,每个节点的输入电容会累积加载到总线上,当节点数量过多时,总线电容超标,导致信号上升沿 / 下降沿变缓,超出 ISO 11898-2 标准要求(通常总线电容需≤1200pF)。
终端电阻匹配:总线阻抗匹配直接影响信号完整性,多节点场景下,节点间距差异会导致阻抗离散,信号反射增强,尤其高速传输(≥2Mbps)时,反射信号叠加易造成数据误码,间接限制节点数量。
协议时序裕量:CANFD 的仲裁机制与数据传输时序存在固有约束,节点数量增加会导致总线竞争加剧,若仲裁域波特率过高,易出现仲裁失败或帧丢失,尤其 CANFD 加速模式下时序裕量更紧张。
收发器驱动能力:普通 CANFD 收发器的总线驱动电流有限(通常显性输出电流≤200mA),多节点同时接收数据时,总负载电流可能超出收发器承受范围,导致驱动电路过载保护。
二、突破节点数量限制的实用方案
针对上述限制因素,可通过硬件优化、参数配置与拓扑调整三方面提升节点扩展能力:
1. 硬件选型与优化
选用高驱动能力收发器:优先选择总线驱动电流大、输入电容小的 CANFD 收发器(如 ASM1042 系列,输入电容≤10pF,显性驱动电流可达 200mA),降低单节点对总线的负载影响。
优化终端电阻配置:采用 "头尾 + 中间" 多点终端电阻方案,根据节点数量调整电阻值,减少信号反射。
降低节点电容负载:每个节点的 CANH/CANL 引脚串联小阻值电阻(22Ω~47Ω),抑制节点电容对总线的影响,同时增强 EMC 抗干扰能力。
2. 总线参数与协议配置
合理设置波特率:节点数量≥20 时,建议仲裁域波特率≤500kbps,数据域波特率≤2Mbps,避免高速传输下的时序冲突;节点数量≤10 时,可适当提升至 5Mbps(需匹配终端电阻)。
禁用 CANFD 加速模式:多节点场景下,CANFD 加速模式对信号质量要求极高,易出现个别节点通讯异常,建议使用标准 CANFD 协议,平衡传输效率与稳定性。
优化数据帧结构:减少单帧数据长度(建议≤32 字节),增加帧间隔时间(≥50μs),降低总线占用率,减少节点间数据冲突。
3. 拓扑结构调整
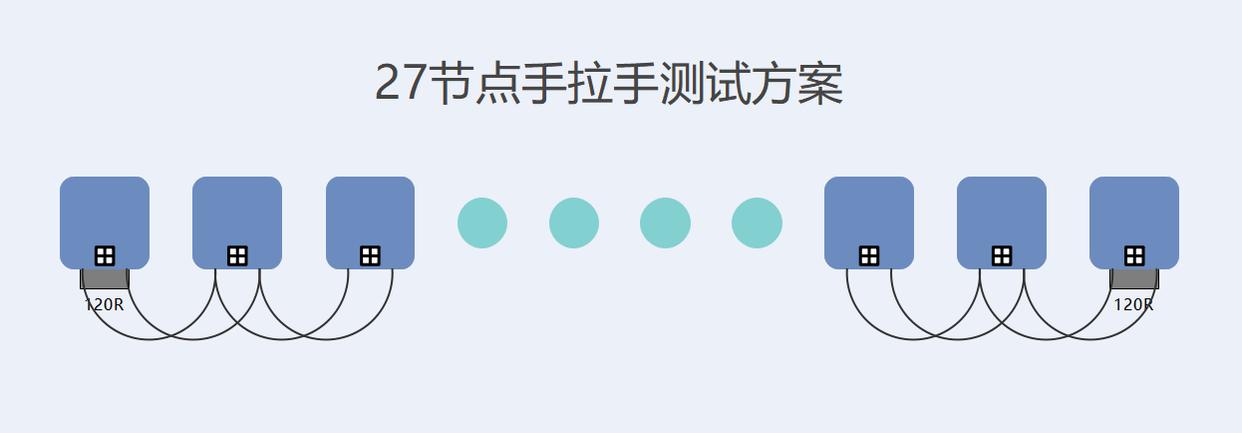
采用星型 + 手拉手混合拓扑:核心节点采用星型布局,分支节点采用手拉手连接,缩短单条总线的节点间距,降低总线电容累积与信号衰减。
分段延长总线距离:当节点分布范围广时,采用总线中继器分段扩展,每段节点数量控制在 15 个以内,通过中继器隔离不同网段的负载与干扰。
控制节点间距:手拉手拓扑中,相邻节点间距建议≤1 米,总线长度≤10 米(2Mbps 速率下),若需更长距离,需降低速率或增加中继器。
三、多节点扩展的测试验证方法
节点数量扩展后,需通过系统性测试确保通讯稳定性,核心测试内容如下:
1. 节点容量极限测试
逐步增加节点数量:从 10 个节点开始,每次增加 5 个节点,在目标波特率下进行 1 万帧并发传输测试,记录丢帧率、误码率,直至出现稳定通讯异常,确定极限节点数量。
压力测试验证:极限节点数量下,连续 72 小时满负载传输(每节点每秒发送 100 帧),监测总线电压、帧率稳定性及收发器温升,确保无过载保护触发。
2. 物理层参数测试
信号完整性测试:测量 CANH/CANL 的显性 / 隐性电平、差分电压(VDiff≥1.5V)、上升沿 / 下降沿时间(≤250ns@2Mbps),确保符合 ISO 标准。
总线负载测试:通过示波器测量总线电容与阻抗,确保总线电容≤1200pF,阻抗匹配误差≤±10%。
3. 抗干扰与稳定性测试
电磁干扰测试:在工业环境下,通过电磁辐射与传导干扰测试,验证多节点总线的 EMC 性能,确保无干扰导致的节点通讯中断。
温湿度环境测试:在 - 40℃~125℃温度范围、10%~90% 湿度条件下,进行多节点通讯测试,验证极端环境下的稳定性(尤其汽车级、宇航级应用)。
四、典型应用场景的节点配置建议
工业控制场景(≤20 节点):采用手拉手拓扑,总线阻抗 60Ω,数据域波特率 2Mbps,选用工业级收发器(如 ASM1042I6SA),无需中继器即可稳定运行。
汽车电子场景(20~30 节点):混合拓扑结构,分段配置终端电阻,数据域波特率 1Mbps, 禁用 CANFD 加速,确保车身控制、传感器网络的可靠通讯。
广域分布场景(>30 节点):采用中继器分段扩展,每段 15 个节点,核心网段波特率 500kbps,通过网关汇总数据,平衡覆盖范围与传输效率。