【DDPM 扩散模型】Part 7:最后总结!Denoising Diffusion Probabilistic Models论文全维度详解
这是整个扩散模型体系从「基础 → 全局」的总结。
希望这篇文章能够让你真正理解DDPM
1. 模型总览
扩散模型包含两个过程:
- 正向过程 (Forward Process / Diffusion Process, qqq):固定规则的马尔可夫链,逐渐向数据添加高斯噪声,直至数据变成纯噪声。
- 反向过程 (Reverse Process, pθp_\thetapθ) :参数化的马尔可夫链,训练神经网络去学习逆向去噪的概率分布,从纯噪声还原数据。

2. 正向过程 (Forward Process)
正向过程被定义为一个固定的马尔可夫链。给定真实数据分布 x0∼q(x0)x_0 \sim q(x_0)x0∼q(x0),我们在每一步添加少量高斯噪声。
2.1 单步转移公式
q(xt∣xt−1)=N(xt;1−βtxt−1,βtI)q(x_t | x_{t-1}) = \mathcal{N}(x_t; \sqrt{1 - \beta_t}x_{t-1}, \beta_t \mathbf{I})q(xt∣xt−1)=N(xt;1−βt xt−1,βtI)
- xtx_txt:当前时间步的图像变量。
- βt\beta_tβt :方差调度参数 (Variance Schedule) 。这是一个预先设定的超参数(常数),随 ttt 线性增加(如 10−4→0.0210^{-4} \to 0.0210−4→0.02)。它决定了每一步加噪的幅度。
- 1−βt\sqrt{1 - \beta_t}1−βt :对上一步图像 xt−1x_{t-1}xt−1 的缩放系数。为了防止在不断加噪过程中数值爆炸,必须衰减原始信号,以保持方差稳定。
- N\mathcal{N}N:表示高斯(正态)分布。
2.2 任意步转移公式 (重参数化技巧)
为了高效训练,我们需要直接从 x0x_0x0 得到 xtx_txt,而不是循环 ttt 次。
定义新变量:
- αt=1−βt\alpha_t = 1 - \beta_tαt=1−βt
- αˉt=∏s=1tαs\bar{\alpha}t = \prod{s=1}^t \alpha_sαˉt=∏s=1tαs (累积乘积)
推导出的边缘分布公式为:
q(xt∣x0)=N(xt;αˉtx0,(1−αˉt)I)q(x_t | x_0) = \mathcal{N}(x_t; \sqrt{\bar{\alpha}_t}x_0, (1 - \bar{\alpha}_t)\mathbf{I})q(xt∣x0)=N(xt;αˉt x0,(1−αˉt)I)
采样形式(用于代码实现):
xt=αˉtx0+1−αˉtϵ,ϵ∼N(0,I)x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1 - \bar{\alpha}_t} \epsilon, \quad \epsilon \sim \mathcal{N}(0, \mathbf{I})xt=αˉt x0+1−αˉt ϵ,ϵ∼N(0,I)
- αˉtx0\sqrt{\bar{\alpha}_t} x_0αˉt x0 :信号项 。随着 ttt 增大,αˉt→0\bar{\alpha}_t \to 0αˉt→0,原始图像信息逐渐消失。
- 1−αˉtϵ\sqrt{1 - \bar{\alpha}_t} \epsilon1−αˉt ϵ :噪声项 。随着 ttt 增大,系数趋向 1,噪声主导图像。
- ϵ\epsilonϵ :从标准正态分布采样的真实噪声 ,这是后续训练的Target(标签)。
3. 反向过程与后验分布 (Reverse Process)
反向过程的目标是推断 q(xt−1∣xt)q(x_{t-1} | x_t)q(xt−1∣xt)。由于我们无法直接求得 q(xt−1∣xt)q(x_{t-1} | x_t)q(xt−1∣xt)(需要遍历整个数据集),我们使用神经网络 pθp_\thetapθ 来近似它。
3.1 近似分布定义
pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))p_\theta(x_{t-1} | x_t) = \mathcal{N}(x_{t-1}; \mu_\theta(x_t, t), \Sigma_\theta(x_t, t))pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))
- μθ(xt,t)\mu_\theta(x_t, t)μθ(xt,t) :模型需要预测的均值(核心学习目标)。
- Σθ(xt,t)\Sigma_\theta(x_t, t)Σθ(xt,t) :模型需要预测的方差 。在 DDPM 论文中,作者将其固定为常数 σt2I\sigma_t^2 \mathbf{I}σt2I(通常设为 βtI\beta_t \mathbf{I}βtI),不进行训练。
3.2 真实的后验均值 (μ~t\tilde{\mu}_tμ~t)
为了指导模型预测均值 μθ\mu_\thetaμθ,我们需要知道理论上的真实后验均值 μ~t\tilde{\mu}_tμ~t 是什么。
利用贝叶斯公式 q(xt−1∣xt,x0)q(x_{t-1} | x_t, x_0)q(xt−1∣xt,x0),可以推导出:
μ~t(xt,x0)=1αt(xt−βt1−αˉtϵ)\tilde{\mu}_t(x_t, x_0) = \frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{\beta_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon \Big)μ~t(xt,x0)=αt 1(xt−1−αˉt βtϵ)
- 这个公式表明:如果我们知道 xtx_txt 和其中包含的噪声 ϵ\epsilonϵ,我们就能算出最佳的去噪方向,回到 xt−1x_{t-1}xt−1 的中心。
- 逻辑链 :
- 真实反向均值 μ~t\tilde{\mu}_tμ~t 由 xtx_txt 和 ϵ\epsilonϵ 决定。
- 模型输入是 xtx_txt,但不知道 ϵ\epsilonϵ。
- 因此,模型的任务变成了:预测 xtx_txt 中的噪声 ϵ\epsilonϵ。
4. 训练目标 (Training Objective)
4.1 参数化选择
根据 3.2 的推导,我们将模型的均值 μθ\mu_\thetaμθ 参数化为:
μθ(xt,t)=1αt(xt−βt1−αˉtϵθ(xt,t))\mu_\theta(x_t, t) = \frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{\beta_t}{\sqrt{1 - \bar{\alpha}t}} \epsilon\theta(x_t, t) \Big)μθ(xt,t)=αt 1(xt−1−αˉt βtϵθ(xt,t))
- ϵθ(xt,t)\epsilon_\theta(x_t, t)ϵθ(xt,t) :这是神经网络的直接输出。网络接收 xtx_txt 和 ttt,输出一个与图像同维度的噪声预测图。
- θ\thetaθ:神经网络(U-Net)的所有可学习参数(权重和偏置)。
4.2 简化损失函数 (Simplified Loss)
原始的变分下界 (ELBO) 包含复杂的 KL 散度项。论文证明,通过上述参数化,优化 KL 散度等价于优化预测噪声和真实噪声之间的 均方误差 (MSE):
Lsimple(θ)=Et,x0,ϵ∥ϵ−ϵθ(αˉtx0+1−αˉtϵ,t)∥2L_{\text{simple}}(\theta) = \mathbb{E}_{t, x_0, \epsilon} \Big \\\| \\epsilon - \\epsilon_\\theta(\\sqrt{\\bar{\\alpha}_t} x_0 + \\sqrt{1 - \\bar{\\alpha}_t} \\epsilon, t) \\\|\^2 \\BigLsimple(θ)=Et,x0,ϵ∥ϵ−ϵθ(αˉt x0+1−αˉt ϵ,t)∥2
- ϵ\epsilonϵ:正向过程中加入的真实噪声(Ground Truth)。
- ϵθ(...)\epsilon_\theta(...)ϵθ(...):模型根据脏图预测的噪声。
- 优化过程 :梯度下降更新 θ\thetaθ,使 ϵθ\epsilon_\thetaϵθ 无限接近 ϵ\epsilonϵ。
5. 算法流程 (Algorithms)
这是模型落地的具体步骤,对应论文中的伪代码。
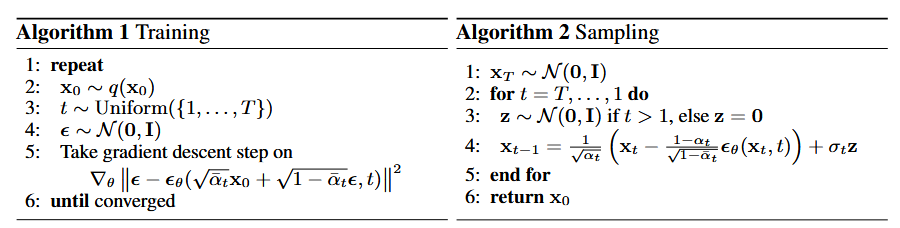
5.1 训练算法 (Training)
- Repeat:开始迭代训练。
- x0∼q(x0)x_0 \sim q(x_0)x0∼q(x0):从数据集中采样一张洁净图片。
- t∼Uniform({1,...,T})t \sim \text{Uniform}(\{1, \dots, T\})t∼Uniform({1,...,T}) :随机采样一个时间步(例如 t=500t=500t=500)。
- ϵ∼N(0,I)\epsilon \sim \mathcal{N}(0, \mathbf{I})ϵ∼N(0,I):采样一个标准高斯噪声。
- 构造 xtx_txt :计算 xt=αˉtx0+1−αˉtϵx_t = \sqrt{\bar{\alpha}_t}x_0 + \sqrt{1-\bar{\alpha}_t}\epsilonxt=αˉt x0+1−αˉt ϵ。
- 计算梯度 :计算损失 ∥ϵ−ϵθ(xt,t)∥2\| \epsilon - \epsilon_\theta(x_t, t) \|^2∥ϵ−ϵθ(xt,t)∥2 关于 θ\thetaθ 的梯度。
- 更新 θ\thetaθ:使用优化器(如 Adam)更新网络参数。
- Until converged:直到 Loss 不再下降。
5.2 采样算法 (Sampling / Inference)
- xT∼N(0,I)x_T \sim \mathcal{N}(0, \mathbf{I})xT∼N(0,I):从标准正态分布采样纯噪声。
- For t=T,...,1t = T, \dots, 1t=T,...,1 do:从最后一步倒推。
- z∼N(0,I)z \sim \mathcal{N}(0, \mathbf{I})z∼N(0,I) :采样随机噪声(如果 t=1t=1t=1 则 z=0z=0z=0)。
- 计算去噪步 :
xt−1=1αt(xt−1−αt1−αˉtϵθ(xt,t))+σtzx_{t-1} = \frac{1}{\sqrt{\alpha_t}} \Big( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar{\alpha}t}} \epsilon\theta(x_t, t) \Big) + \sigma_t zxt−1=αt 1(xt−1−αˉt 1−αtϵθ(xt,t))+σtz- 前半部分(大括号内):基于预测噪声算出的后验均值 μ~t\tilde{\mu}_tμ~t(确定性部分)。
- 后半部分 (σtz\sigma_t zσtz):随机扰动项。模拟朗之万动力学 (Langevin Dynamics),增加多样性,防止图像坍缩。
- End for。
- Return x0x_0x0:输出生成的图像。
6. 网络架构 (Model Architecture)
在实现中,ϵθ\epsilon_\thetaϵθ 具体由以下组件构成:
-
Backbone: U-Net
- 输入 :xtx_txt (例如 32×32×332 \times 32 \times 332×32×3)。
- 输出 :ϵpred\epsilon_\text{pred}ϵpred (与输入同尺寸 32×32×332 \times 32 \times 332×32×3)。
- 结构:包含下采样(Downsampling)提取特征,瓶颈层(Bottleneck)处理语义,上采样(Upsampling)恢复分辨率。
-
Time Embedding (位置编码)
- 问题 :U-Net 共享权重,必须知道当前处理的是 ttt 是多少。
- 解决 :使用 Transformer 中的正弦位置编码 (Sinusoidal Embedding) 将标量 ttt 映射为向量,通过 MLP 处理后,加到 U-Net 的每个残差块 (Residual Block) 中。
-
Self-Attention (自注意力)
- 位置 :通常在 U-Net 的低分辨率层(如 16×1616 \times 1616×16 特征图处)。
- 目的:捕捉长距离依赖(Global Context),解决卷积核感受野有限的问题。
7. 符号公式完整对照表
| 符号 | 定义/公式 | 含义与备注 |
|---|---|---|
| x0x_0x0 | Data | 真实数据(原图)。 |
| xTx_TxT | N(0,I)\mathcal{N}(0, \mathbf{I})N(0,I) | 纯高斯噪声,正向过程的终点,反向过程的起点。 |
| xtx_txt | Latent | 第 ttt 步的潜变量(含噪图像)。 |
| ϵ\epsilonϵ | Noise | 真实噪声 。训练时的 Target,服从 N(0,I)\mathcal{N}(0, \mathbf{I})N(0,I)。 |
| ϵθ\epsilon_\thetaϵθ | Function | 预测噪声 。神经网络的输出,依赖于输入 xt,tx_t, txt,t 和参数 θ\thetaθ。 |
| θ\thetaθ | Parameters | 神经网络(U-Net)的所有权重和偏置。 |
| βt\beta_tβt | Hyperparameter | 方差调度。控制每一步加噪的量。常数,线性增加。 |
| αt\alpha_tαt | 1−βt1 - \beta_t1−βt | 单步保留原始信息的比例。 |
| αˉt\bar{\alpha}_tαˉt | ∏s=1tαs\prod_{s=1}^t \alpha_s∏s=1tαs | 累积保留比例 。用于一步计算 xtx_txt。 |
| q(xt∣x0)q(x_t|x_0)q(xt∣x0) | Distribution | 正向扩散分布 。根据 αˉt\bar{\alpha}_tαˉt 直接定义的分布。 |
| pθ(xt−1∣xt)p_\theta(x_{t-1}|x_t)pθ(xt−1∣xt) | Distribution | 反向生成分布。模型试图拟合的目标分布。 |
| μ~t\tilde{\mu}_tμ~t | Formula | 真实后验均值 。已知 x0x_0x0 时,xt−1x_{t-1}xt−1 的理论最佳中心。 |
| μθ\mu_\thetaμθ | Formula | 预测均值 。模型通过预测 ϵθ\epsilon_\thetaϵθ 间接计算出的 xt−1x_{t-1}xt−1 中心。 |
| σt\sigma_tσt / Σ\SigmaΣ | Formula | 反向过程的方差。DDPM 中固定为 βt\beta_tβt 或 β~t\tilde{\beta}_tβ~t。 |
| TTT | Constant | 扩散总步数,通常为 1000。 |
| MSE | Loss | Mean Squared Error,均方误差。LsimpleL_{\text{simple}}Lsimple 的计算方式。 |
🎉祝你天天开心,我将更新更多有意思的内容,欢迎关注!
最后更新:2025年12月
作者:Echo