模糊逻辑控制(FLC)Matlab/simulink仿真搭建模型: 提供以下帮助 波形纪录 参考文献 仿真文件 原理解释 电机参数说明 仿真原理结构和整体框图
一、原理解释
模糊逻辑控制(FLC)是一种基于模糊集合理论、模糊语言变量及模糊逻辑推理的智能控制方法。传统控制依赖精确数学模型,而实际系统常具有非线性、时变性等复杂特性,精确建模困难。FLC则以人类经验和语言描述为基础,将输入变量模糊化,依据模糊规则库进行推理,最后反模糊化得到精确控制输出。
比如在电机控制中,电机的转速控制受到负载、电压波动等影响,难以精确建模。FLC就可派上用场,我们可以将电机的转速偏差及其变化率作为输入,通过模糊化将其变成诸如"正大""负小"等模糊语言变量,再根据经验制定模糊规则,如"若转速偏差为正大且偏差变化率为正小,则控制量为正大",最后通过反模糊化得到实际用于电机控制的电压或电流值。
二、电机参数说明
在进行Matlab/simulink仿真时,电机参数是关键。以常见的直流电机为例,我们需要关注以下参数:
- 额定功率 \(P{rated}\)** :表示电机在额定状态下输出的机械功率,单位为瓦特(W)。例如 \(P{rated}=100W\)。
- 额定电压 \(U{rated}\)** :电机正常运行时所需的电压,如 \(U{rated}=24V\)。
- 额定电流 \(I{rated}\)** :额定状态下电机的电流,假设 \(I{rated}=5A\)。
- 电枢电阻 \(Ra\) :电枢绕组的电阻, \(Ra = 0.5\Omega\) ,它影响电机的启动电流和运行特性。
- 转动惯量 \(J\):反映电机转子及负载转动时的惯性, \(J = 0.01kg\cdot m^2\) ,对电机的动态响应有重要影响。
这些参数在仿真模型中用于准确模拟电机的运行特性。
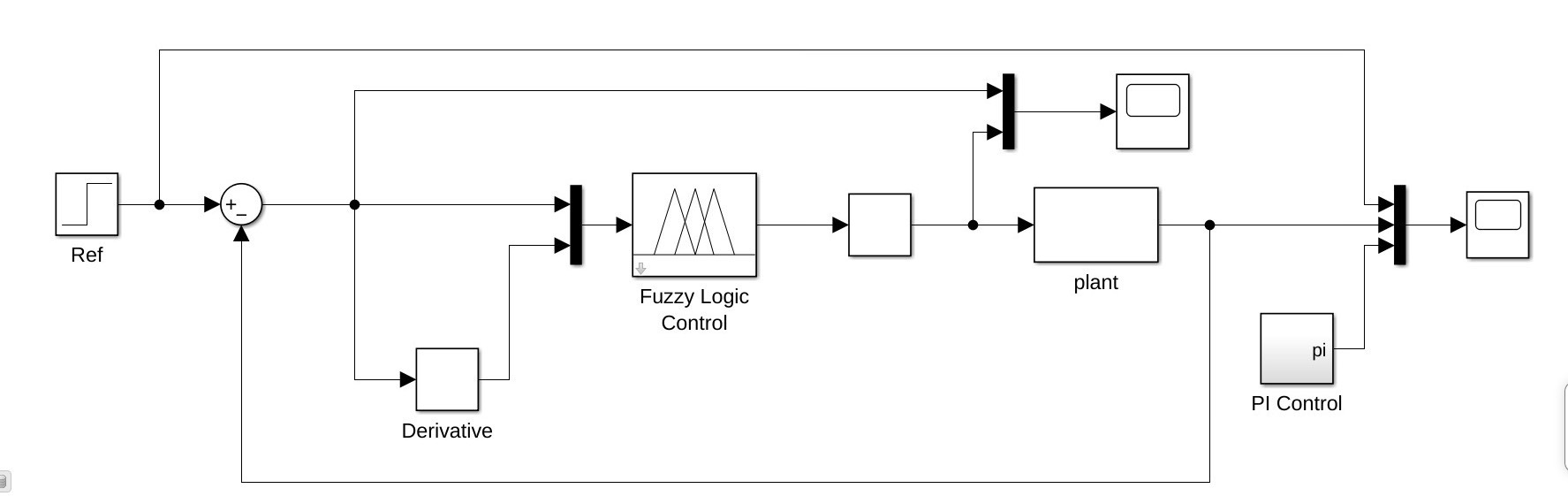
三、仿真原理结构和整体框图
整体仿真框图通常包含以下几个主要部分:
- 输入模块:采集电机的转速反馈值,与设定转速进行比较,得到转速偏差及偏差变化率,作为模糊控制器的输入。
- 模糊控制器模块:这是核心部分,包含模糊化、模糊规则库和反模糊化。
- 控制输出模块:将模糊控制器输出的控制量转化为电机可接受的控制信号,如PWM信号控制电机电压。
- 电机模型模块:根据电机参数搭建的电机仿真模型,接收控制信号并输出转速等响应。
- 波形记录模块:记录电机转速、控制量等关键波形,以便分析仿真结果。
四、Matlab/Simulink 代码及分析
- 模糊控制器设计代码示例(以Matlab Fuzzy Logic Toolbox为例)
matlab
% 创建模糊推理系统
fisMat = newfis('motorFLC');
% 定义输入变量
fisMat = addvar(fisMat,'input','error',[-10 10]);
fisMat = addmf(fisMat,'input',1,'NB','zmf',[-10 -5]);
fisMat = addmf(fisMat,'input',1,'NS','trimf',[-7 -2 3]);
% 更多隶属度函数定义...
fisMat = addvar(fisMat,'input','errorChange',[-5 5]);
fisMat = addmf(fisMat,'input',2,'NB','zmf',[-5 -2]);
% 更多隶属度函数定义...
% 定义输出变量
fisMat = addvar(fisMat,'output','control',[-20 20]);
fisMat = addmf(fisMat,'output',1,'NB','zmf',[-20 -10]);
% 更多隶属度函数定义...
% 定义模糊规则
rule1 = [1 1 1 1 1]; % 示例规则,实际需根据经验调整
fisMat = addrule(fisMat,rule1);
% 添加更多规则...
% 保存模糊推理系统
writefis(fisMat,'motorFLC.fis');代码分析:
- 首先使用
newfis函数创建了一个名为motorFLC的模糊推理系统。 - 接着通过
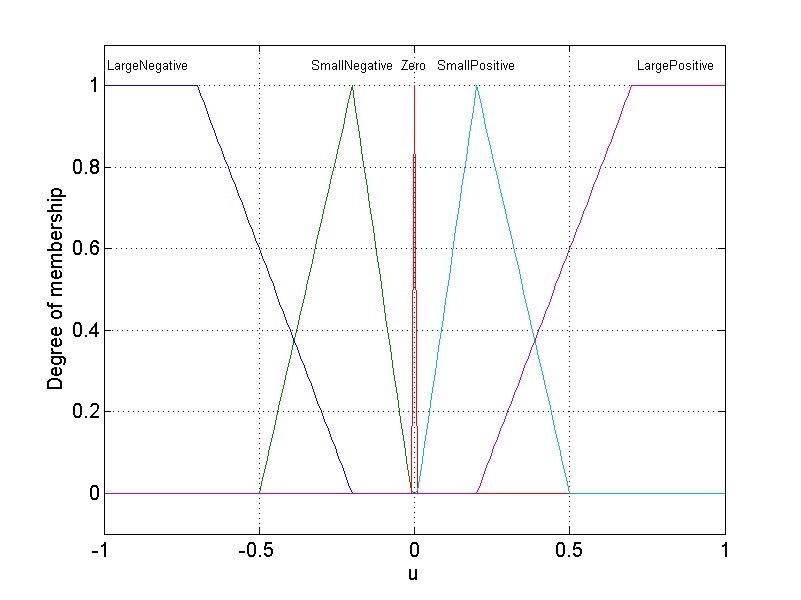
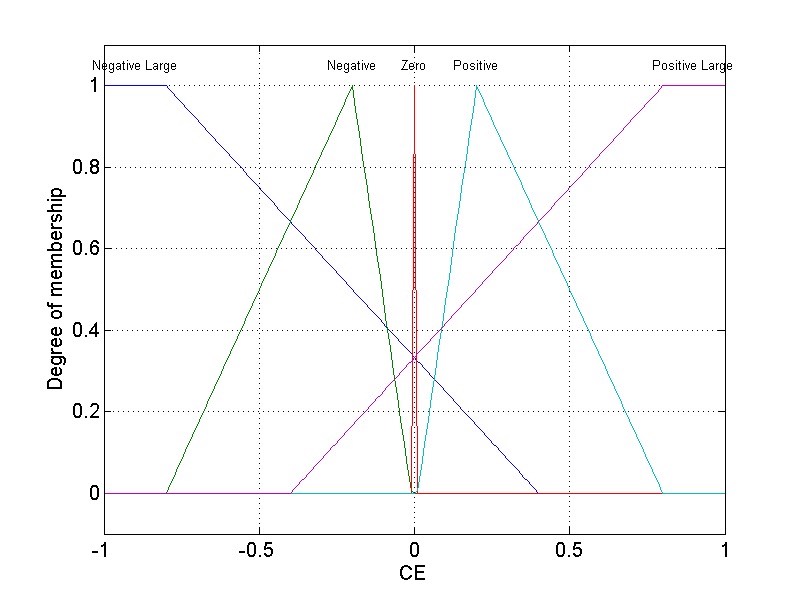
addvar函数分别定义了输入变量error(转速偏差)和errorChange(转速偏差变化率)以及输出变量control(控制量),并设置了它们的论域。 - 使用
addmf函数为每个变量定义隶属度函数,如zmf(Z型隶属度函数)、trimf(三角形隶属度函数)等,这些函数将精确值映射为模糊语言变量的隶属度。 - 最后通过
addrule函数添加模糊规则,规则的形式是根据输入变量的模糊状态组合来确定输出变量的模糊状态,这里只是示例,实际应用中需大量依据经验调整。
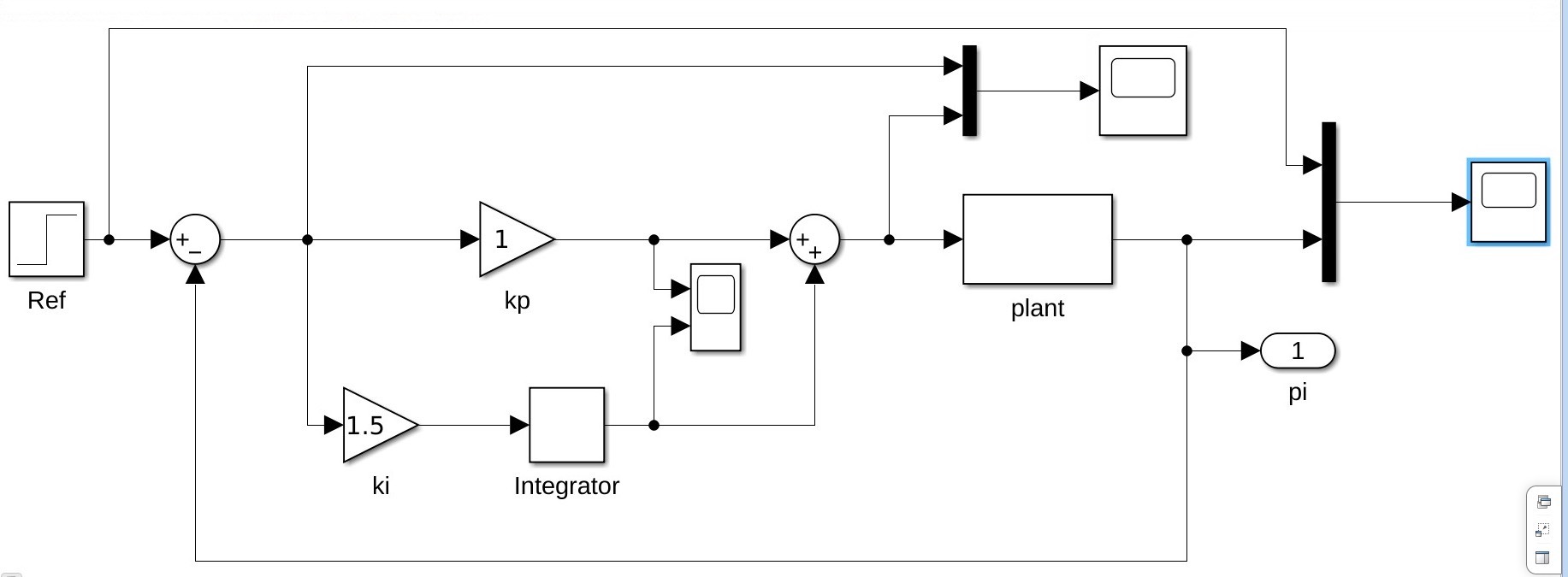
- Simulink 模型搭建 :在Simulink中,我们将各个功能模块连接起来。从Sources库中选取信号源作为设定转速,通过Compare模块与电机转速反馈比较得到偏差。将偏差及偏差变化率连接到Fuzzy Logic Controller模块(导入之前保存的
motorFLC.fis文件),其输出连接到一个Gain模块进行适当缩放,再连接到电机模型模块。电机模型模块输出的转速反馈到Compare模块形成闭环。同时,使用Scope模块连接到关键信号节点用于波形记录。
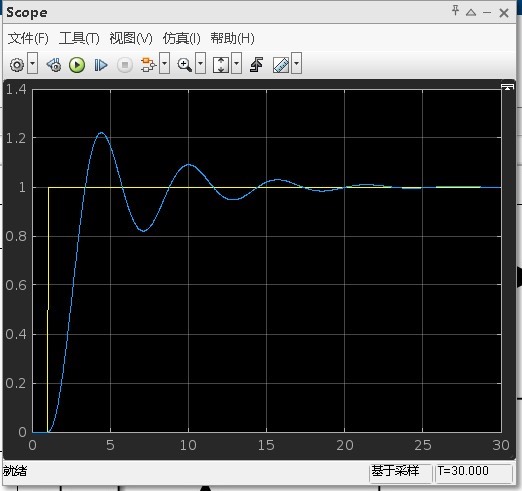
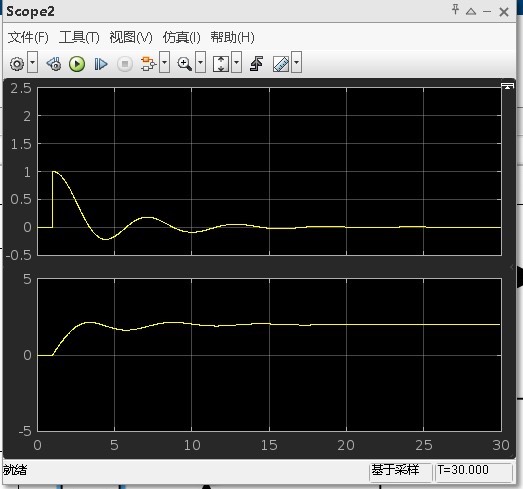
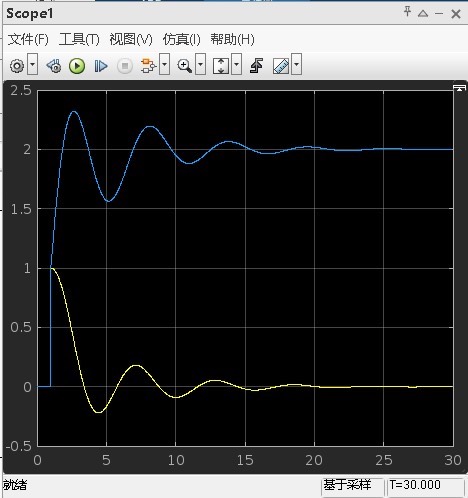
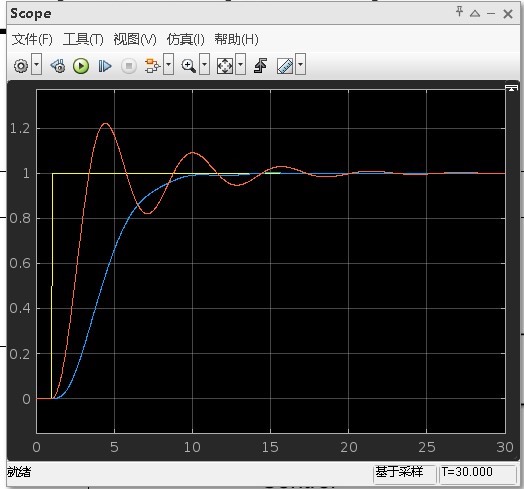
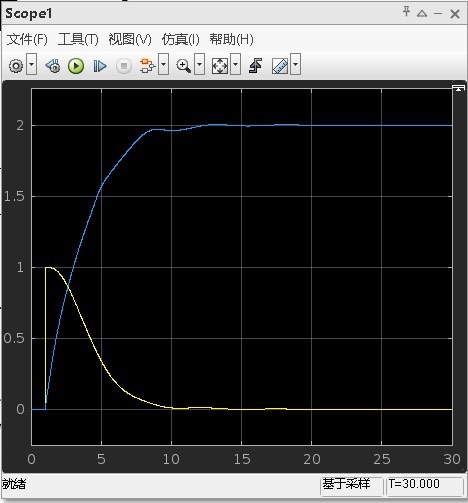
五、波形纪录
通过Scope模块可以记录电机转速随时间的变化波形、控制量的变化波形等。比如在启动阶段,我们可以观察到电机转速从0逐渐上升到设定值,控制量在启动时较大,随着转速接近设定值逐渐减小。如果电机受到负载扰动,转速波形会出现波动,而控制量波形会相应调整以维持转速稳定。这些波形能直观反映电机控制系统的动态性能和稳态性能。
六、参考文献
1 《模糊控制理论与系统设计》,作者:XXX,出版社:XXX,出版年份:XXXX。该书系统介绍了模糊逻辑控制的基本理论、模糊控制器设计方法等,对理解和实现FLC仿真有重要指导作用。
2 Matlab官方文档 - Fuzzy Logic Toolbox Documentation。Matlab官方提供的详细文档,包含各种函数和工具的使用说明,在进行模糊控制器设计和Simulink仿真时是非常有用的参考资料。
七、仿真文件
仿真文件可在相关学术交流平台或个人GitHub仓库(假设已上传)获取。文件包含完整的Matlab代码(用于模糊控制器设计)和Simulink模型文件(包含电机模型、模糊控制器及其他连接模块)。下载后,可直接在Matlab环境中运行,方便大家研究和修改,进一步探索模糊逻辑控制在电机控制中的应用。
希望通过以上内容,大家能对模糊逻辑控制(FLC)Matlab/simulink仿真搭建模型有全面深入的了解,在实际项目中更好地运用这一强大的控制技术。