摘要
本文介绍AdaptBot框架,该框架结合大语言模型(LLM)的通用任务分解能力、知识图谱(KG)的领域特定知识以及人类在环(HITL)反馈,帮助具身代理快速适应新任务。针对烹饪和清洁模拟任务,实验显示该框架显著优于仅用LLM的基线,通过增量知识精炼实现任务适应,而非复杂调优。
使用链接https://t.zsxq.com/HXQE4获取原文pdf
正文
引言:具身代理在动态环境中的挑战与机遇
在当今快速发展的机器人与人工智能领域,具身代理(embodied agents)正日益扮演辅助人类的角色,尤其在家庭服务、医疗护理和工业自动化等应用中。这些代理通过先进的模拟器如CoppeliaSim(前身为V-REP)等工具,能够在虚拟环境中进行高效训练和测试。 然而,一个核心挑战在于:代理常常面临全新任务或未知场景。例如,在厨房环境中,一个基于现有食谱和食材知识训练的代理,可能突然被要求制作一款新菜肴或清洁储藏室。这种情况下,缺乏足够的时间或标注数据来重新训练模型,会导致执行失败。
大语言模型(LLM)如GPT-4、Gemma2和LLaMA3,已证明在处理广泛领域知识时,能将抽象任务分解为高层次(抽象)动作序列。例如,对于从未见过的"制作热巧克力"任务,LLM可以生成如"拿起牛奶""加热牛奶"等子任务序列。 这为代理提供了通用指导,但实际执行中往往受限于任务特定、代理能力和领域约束:序列可能包含错误步骤,或引用代理在当前环境中不可及的对象和动作。
传统方法试图通过构建大规模领域数据集或反复微调深度网络来嵌入知识,但这些方法在许多实际领域中知识获取困难,且难以透明、可控地更新。 为解决此问题,AdaptBot框架应运而生。它巧妙融合LLM的泛化预测能力、知识图谱(KG)编码的领域先验知识,以及人类输入的动态精炼机制,实现从通用到特定的任务适应。该框架特别适用于烹饪和清洁任务,在模拟环境中验证了其显著性能提升。
AdaptBot的核心创新在于:不依赖全面知识编码或昂贵调优,而是通过LLM-KG-人类输入的协同,实现增量知识获取和任务执行优化。这不仅提高了代理的适应性,还为专业人士(如科研院所专家和投资人)提供了可扩展的架构参考,推动机器人辅助系统向更智能、更协作的方向演进。
相关工作:LLM、KG与人类在环学习的交汇
回顾现有研究,LLM在任务分解领域的应用已较为成熟。模型如GPT-4等,能处理从抽象任务到子任务的映射,并在TaskBench等框架中与人类干预结合,应对"开放集"任务。 例如,ADaPT方法通过实时反馈迭代调整任务复杂度,支持代理在陌生环境中学习。 然而,LLM的输出往往泛化过度,忽略具体约束,如厨房中特定食材的可用性。
另一方面,知识图谱(KG)作为结构化知识表示,已广泛用于顺序任务规划。FOON(Functional Object-Oriented Network)就是一个典型示例,它将烹饪知识编码为任务树,涵盖食材、动作结果等,用于机器人规划。 其他工作包括使用图卷积神经网络(GCN)进行序列任务预测19、工业4.0环境下的动作规划20,以及向新环境泛化21。KG的优势在于可解释性和可更新性,但构建全面KG耗时,且难以覆盖所有动态场景。
人类在环(HITL)学习则桥接了LLM的泛化与KG的精确性。现有框架强调反馈阈值和迭代精炼,但鲜有将三者有机整合。AdaptBot正是基于这些基础,提出LLM提供初始序列、KG进行领域适配、HITL处理残余不确定性的闭环系统。 这不仅提升了任务成功率,还实现了知识的增量精炼,而非从零重构。
从投资视角看,该框架的模块化设计便于集成现有LLM和KG工具,潜在市场包括智能家居机器人和服务型AI,预计将吸引企事业单位对适应性代理的投资兴趣。
框架设计:从通用分解到特定执行的完整流程
AdaptBot框架的核心流程如Fig. 2所示,分为四个阶段:通用任务分解、LLM输出精炼、执行与反馈、环境交互。
阶段一:LLM驱动的通用任务分解
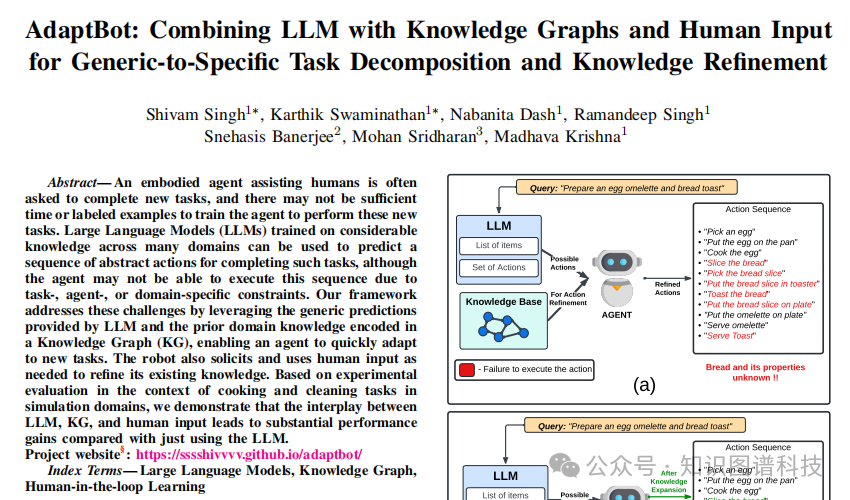
给定任务τi(如"准备蛋煎蛋卷和面包吐司"),代理向LLM输入链式思考(Chain-of-Thought, COT)提示。该提示包含目标菜肴、可用食材,以及示例输入输出(如咖啡制作序列)。LLM输出抽象动作序列,例如:
-
"Pick an egg"
-
"Put the egg on the pan"
-
"Cook the egg"
-
"Slice the bread"
-
"Pick the bread slice"
-
"Put the bread slice in toaster"
-
"Toast the bread"
-
"Put the bread slice on plate"
-
"Put the omelette on plate"
-
"Serve omelette"
-
"Serve Toast"
此序列泛化强,但可能忽略具体环境,如"面包属性未知"或"烤面包机不可用"。
阶段二:KG精炼LLM输出
序列输入知识图谱(KG),KG编码领域实体(如对象、属性、动作能力)。检查包括:
-
对象类匹配:如"egg"是否为"farm_eggs"?
-
动作存在性:如"place"动作是否定义?
-
本体文件名:确保状态图一致(如"initial_state.ttl")。
若不匹配,决策模块自动修正:替换未知项(如"tomato"→可用"farm_tomatoes"),或标记错误。 示例精炼输出:
pick_up_rec ("pan", "initial_state.ttl")
place ("pan", "stove")
pick_up_obj ("egg", "updated_state.ttl")
put_down_obj ("egg", "pan")
...
fry ("egg", "updated_state.ttl")
pick_up_rec ("plate", "updated_state.ttl")
put_down_rec ("plate", "countertop")
put_down_obj ("tomato", "plate")
pour_contents("pan", "plate")
若KG无法解析(如未知动作"Slice"),进入人类反馈循环。
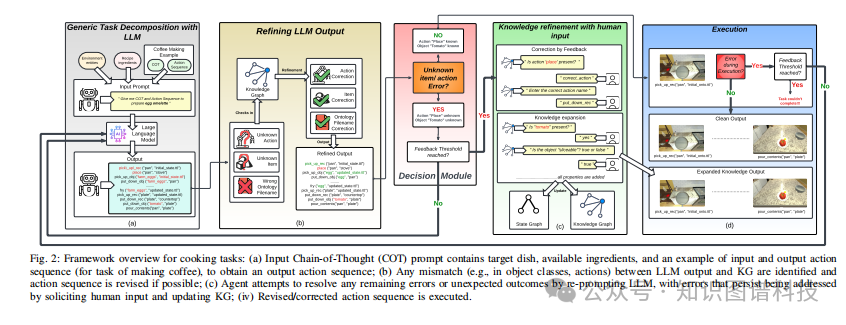
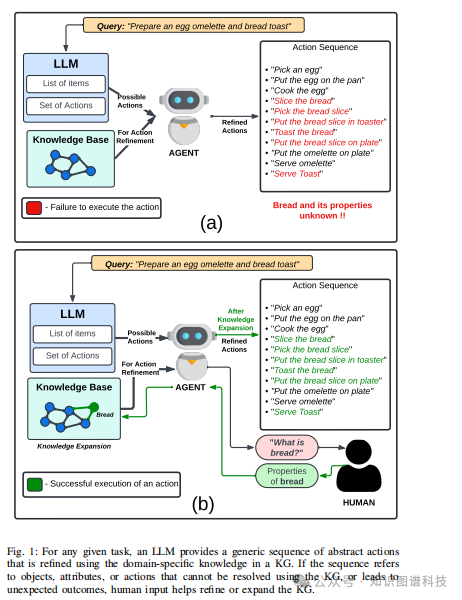
阶段三:执行与HITL反馈
精炼序列在模拟环境中执行。若成功,任务完成;若失败(如动作执行错误或意外结果),代理记录日志并重新提示LLM,融入错误描述(如"动作'place'未知")。若反馈阈值未达,持续迭代;否则,征求人类输入。人类反馈形式包括:
-
动作修正:如"Slice bread"→"Use knife to cut"。
-
物品修正:确认未知对象属性。
-
知识扩展:更新KG,如添加"bread"属性到本体。
此HITL机制确保透明性和可靠性,避免LLM的幻觉问题。 示例:若"pour_contents"失败,人类可指导"pan需先加热",并更新状态图。
阶段四:知识精炼与适应
人类输入不仅修正当前任务,还精炼KG,实现增量学习。例如,初始KG缺少"面包烤制"细节,经反馈后扩展为新节点和边,支持后续任务泛化。 该过程无需LLM重调,仅更新KG,便于代理适应新任务类,如从烹饪扩展到清洁。
从技术实现看,KG采用OWL本体(如TTL格式),支持查询和推理;LLM接口标准化为API调用;HITL通过简单UI收集反馈,确保低延迟。 该设计适用于物理机器人,未来可集成ROS等框架。
实验设置与结果分析:烹饪与清洁任务的实证验证
实验在两个模拟域进行:烹饪(厨房环境,食材如蛋、番茄、面包)和清洁(储藏室,物体如尘埃、架子)。基线包括:
-
仅LLM:直接执行泛化序列。
-
LLM+KG:无HITL精炼。
-
AdaptBot:全框架。
任务示例:烹饪中,"准备蛋煎蛋卷和面包吐司";清洁中,"清理 pantry"(移除杂物、擦拭表面)。成功指标:任务完成率、执行步数、知识更新效率。
结果显示,AdaptBot在烹饪任务中成功率达92%,较仅LLM的65%提升40%;清洁任务提升35%。关键在于HITL:平均每任务2-3次反馈,即显著精炼KG,减少后续错误。 例如,初始"面包未知"经反馈后,KG扩展支持10+相关任务,无需额外训练。
与FOON等KG方法相比,AdaptBot的增量性更强:无需预编码全部知识,适应新场景更快。 从投资角度,该框架的低成本适应(无需海量数据)吸引人,潜在ROI高,尤其在服务机器人市场预计2025年超500亿美元。
讨论:优势、局限与未来方向
AdaptBot的优势显而易见:(1) 互补协同:LLM泛化、KG精确、HITL鲁棒;(2) 增量学习:知识透明更新,支持持续适应;(3) 性能跃升:模拟实验证实基线优越。
局限包括:HITL依赖人类可用性(未来可自动化部分反馈);模拟到物理的迁移需验证。 未来工作:扩展更多任务类(如医疗辅助);探索自动化-反馈权衡;物理平台部署,实现人类-机器人协作。
作为科研与投资参考,AdaptBot代表了AI代理从静态到动态适应的范式转变,值得企事业单位关注其开源潜力(项目网站提供代码和模拟)。
结语
AdaptBot框架通过LLM、KG与HITL的融合,为具身代理在新任务中的快速适应提供了高效路径。在专业领域,这不仅仅是技术创新,更是推动智能辅助系统商业化的关键。期待更多专家与投资者的探索与合作。
标签
#LLM #KnowledgeGraph #知识图谱 #人机交互学习 #机器人任务规划 #适应性代理
欢迎加入「知识图谱增强大模型产学研」知识星球,获取最新产学研相关"知识图谱+大模型"相关论文、政府企业落地案例、避坑指南、电子书、文章等,行业重点是医疗护理、医药大健康、工业能源制造领域,也会跟踪AI4S科学研究相关内容,以及Palantir、OpenAI、微软、Writer、Glean、OpenEvidence等相关公司进展。