你有没有过这样的经历:花了一周调参的模型,在训练集上准确率直奔99%,一到测试集就"翻车"到60%?对着混乱的误差曲线抓头发时,是不是忍不住想问:到底有没有一套理论,能让我们提前预判模型的泛化能力?
如果你在入门和进阶阶段已经摸清了模型的"操作手册",那今天这篇就带你钻进机器学习的"理论引擎室"。我们不谈调参技巧,不聊数据集预处理,专门拆解支撑起所有监督学习模型的核心理论------统计学习理论中的VC维、Rademacher复杂性,以及它们如何编织出"泛化误差边界"这张指导模型设计的"安全网"。
放心,哪怕你对"理论"二字有天然抵触,这篇也会用你熟悉的场景、生活化的类比,把这些抽象概念嚼碎了喂给你。更重要的是,每个理论点后我都会留一个"实战钩子",告诉你这些看似"无用"的理论,到底能帮你解决什么实际问题。
先搞懂一个核心矛盾:为什么"训练好"不等于"能用"?
在聊VC维和Rademacher复杂性之前,我们得先破解一个最基础的困惑:模型的"训练误差"和"泛化误差"到底差在哪?
想象一下:你要教一个机器人识别"猫"。你给它看了100张自家橘猫的照片,机器人很快就学会了------只要是"橘色、毛茸茸、有尾巴"的动物,它都判定为猫。可当你给它看一张布偶猫的照片时,它却摇了摇头;再给一张黑猫照片,它直接报错。
这里的问题很明显:机器人学的是"你家橘猫的特征",而不是"所有猫的通用特征"。训练误差就是机器人在"自家橘猫照片"上的识别错误率,泛化误差则是它在"所有猫照片"上的真实错误率。
统计学习理论的核心目标,就是想办法通过"训练误差"这个我们能观测到的指标,去估算"泛化误差"这个我们真正关心的指标。而要实现这个目标,我们需要先给模型的"学习能力"定个性------这就轮到VC维登场了。
VC维:模型"学习能力"的"度量衡"
第一次听到"VC维"时,我一度以为是某个大佬的名字缩写(比如"V先生和C先生提出的维度")。后来才知道,它是"Vapnik-Chervonenkis维"的简称,没错,还真就是两位大佬Vapnik和Chervonenkis提出的。
VC维的核心作用只有一个:衡量一个模型"最多能精准拟合多少个样本"的能力,换句话说,就是模型的"表达能力"上限。但这个"拟合"不是简单的"预测正确",而是更严格的"打散"(shattering)。
别急,"打散"这个词听着玄乎,我们用一个小游戏就能搞懂:
假设你面前有3个点,分别标为A、B、C。现在给每个点贴上"正例"(○)或"反例"(×)的标签,你能想到多少种不同的贴法?答案是8种(2³)------从"全○"到"全×",再到各种组合。
如果有一种模型(比如一条直线),能对这8种贴法中的每一种,都找到一条直线把○和×完美分开,那我们就说:这条直线组成的模型,能"打散"3个点。
那如果是4个点呢?你可以试着在纸上画4个点,不管怎么摆,你都找不到一条直线,能把所有2⁴=16种标签组合都完美分开。比如当4个点摆成正方形时,"对角为○,另外两个为×"的情况,直线就无法区分。
光说不练假把式,我们用Python代码在PyCharm中运行,直观验证"直线分类器能打散3点但不能打散4点"的结论。运行前需确保安装了numpy和matplotlib库(安装命令:pip install numpy matplotlib):
python
import numpy as np
import matplotlib.pyplot as plt
# 设置中文字体和负号显示(解决中文乱码问题)
plt.rcParams['font.sans-serif'] = ['SimHei', 'Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
# ---------------------- 1. 验证3个点可被直线打散 ----------------------
# 定义3个样本点(二维平面)
X_3 = np.array([[0, 0], [0, 1], [1, 0]])
# 生成3个点的所有2^3=8种标签组合(0为反例,1为正例)
all_labels_3 = [[0, 0, 0], [0, 0, 1], [0, 1, 0], [0, 1, 1],
[1, 0, 0], [1, 0, 1], [1, 1, 0], [1, 1, 1]]
# 创建2x4子图展示所有情况
fig, axes = plt.subplots(2, 4, figsize=(16, 8))
axes = axes.flatten()
for idx, labels in enumerate(all_labels_3):
# 分离正例和反例
pos = X_3[np.array(labels) == 1]
neg = X_3[np.array(labels) == 0]
# 绘制样本点
axes[idx].scatter(pos[:, 0], pos[:, 1], c='red', s=100, label='正例')
axes[idx].scatter(neg[:, 0], neg[:, 1], c='blue', s=100, label='反例')
# 找分类直线(这里用简单的线性分类器求解)
if len(pos) > 0 and len(neg) > 0:
# 用最小二乘法拟合分类线 ax + by + c = 0
X = np.hstack([X_3, np.ones((3, 1))])
y = np.array(labels) * 2 - 1 # 转换为-1和1
w = np.linalg.lstsq(X, y, rcond=None)[0]
a, b, c = w
# 绘制分类线(指定颜色和线型,避免格式错误)
x_line = np.linspace(-0.5, 1.5, 100)
y_line = (-a * x_line - c) / b
axes[idx].plot(x_line, y_line, color='green', linestyle='-') # 明确参数,更易读
axes[idx].set_title(f'标签组合{idx + 1}')
axes[idx].legend()
axes[idx].grid(True)
plt.suptitle('3个点的所有标签组合均可被直线打散', fontsize=16)
plt.tight_layout()
plt.savefig('3_points_shattering.png') # 运行后在PyCharm项目目录生成图片
plt.show()
# ---------------------- 2. 验证4个点不可被直线打散 ----------------------
# 定义4个正方形顶点(典型不可打散的4点分布)
X_4 = np.array([[0, 0], [0, 1], [1, 0], [1, 1]])
# 选择"对角为正例"的标签组合(直线无法区分)
labels_4 = [1, 0, 0, 1]
plt.figure(figsize=(8, 6))
pos = X_4[np.array(labels_4) == 1]
neg = X_4[np.array(labels_4) == 0]
# 绘制样本点
plt.scatter(pos[:, 0], pos[:, 1], c='red', s=100, label='正例')
plt.scatter(neg[:, 0], neg[:, 1], c='blue', s=100, label='反例')
# 修复核心错误:用color和linestyle参数明确指定(替代错误的"green--"格式)
x_line = np.linspace(-0.5, 1.5, 100)
y_line1 = x_line # 对角线
y_line2 = x_line + 0.5 # 上移对角线
y_line3 = x_line - 0.5 # 下移对角线
plt.plot(x_line, y_line1, color='green', linestyle='--', label='尝试分类线1')
plt.plot(x_line, y_line2, color='orange', linestyle='--', label='尝试分类线2')
plt.plot(x_line, y_line3, color='purple', linestyle='--', label='尝试分类线3')
plt.title('4个点的"对角标签"组合无法被直线打散', fontsize=14)
plt.legend()
plt.grid(True)
plt.savefig('4_points_not_shattering.png') # 运行后生成图片
plt.show()代码整体作用分析
这段代码演示了机器学习中VC维(Vapnik-Chervonenkis dimension)的核心概念------"打散(shattering)"。VC维是衡量一个假设类(如线性分类器)表示能力的数学工具,决定了模型的复杂度和泛化能力。
代码的核心目的:
-
证明在二维平面中,3个点可以被直线"打散"(即存在直线能够分开所有可能的标签组合)
-
证明在二维平面中,4个点无法被直线"打散"(存在某些标签组合无法用直线分开)
技术细节:
-
使用最小二乘法求解分类直线
-
通过可视化展示所有可能的标签组合
-
展示线性分类器的表达能力边界
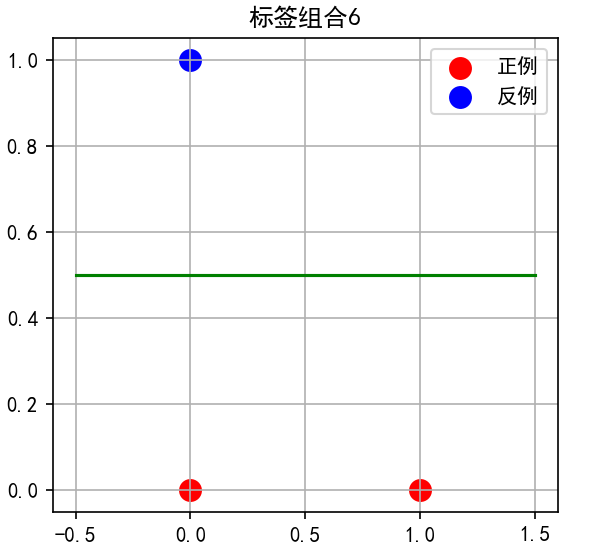
运行上述代码后,会生成两张图片:第一张3_points_shattering.png展示3个点的8种标签组合都能找到绿色分类线完美分离;第二张4_points_not_shattering.png中,无论绘制哪条直线(绿色、橙色、紫色虚线),都无法同时将红色对角点(正例)和蓝色对角点(反例)分开。这就直观证明了直线分类器的VC维是3。
第一张3_points_shattering.png:
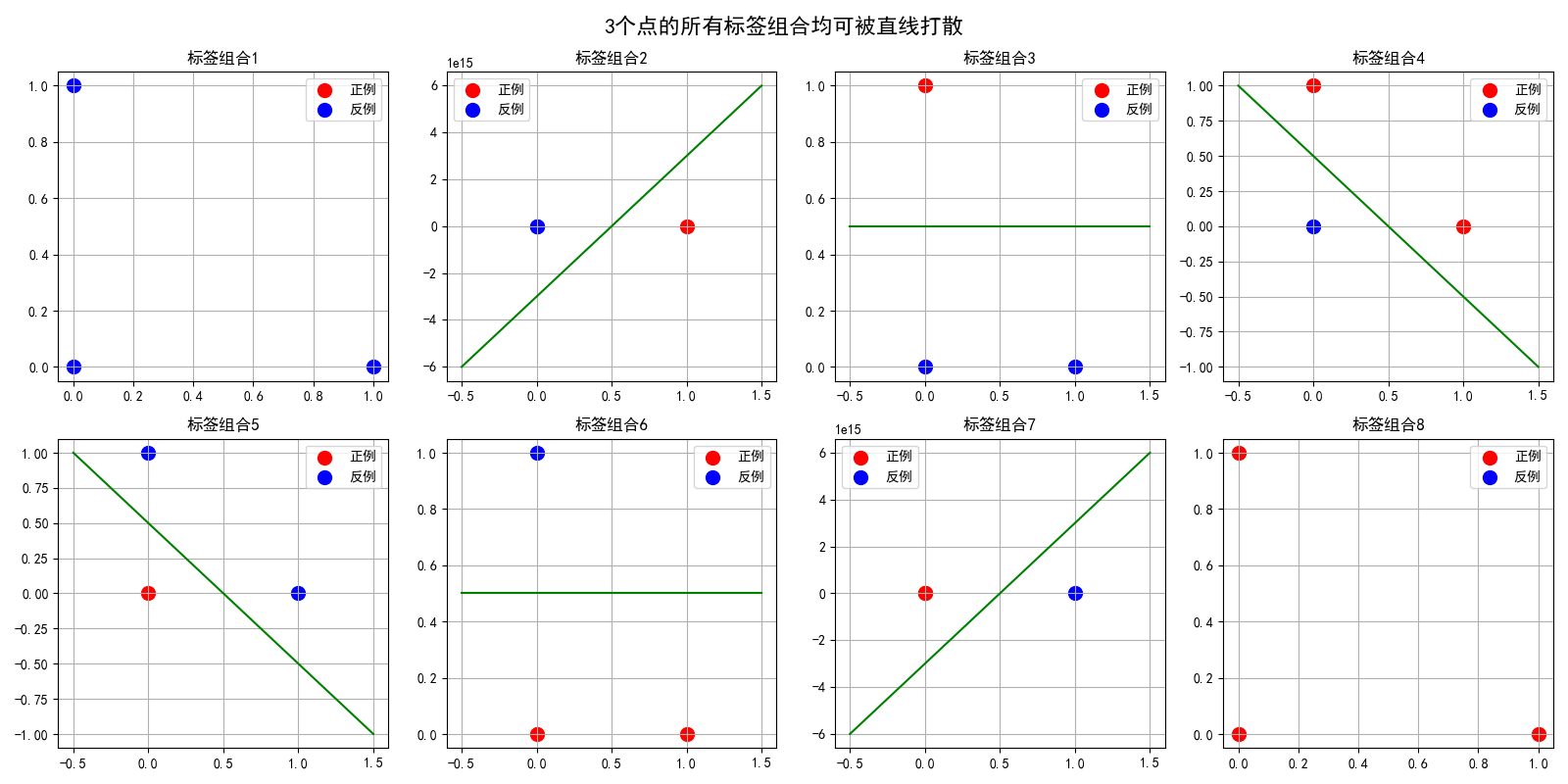
子图分析
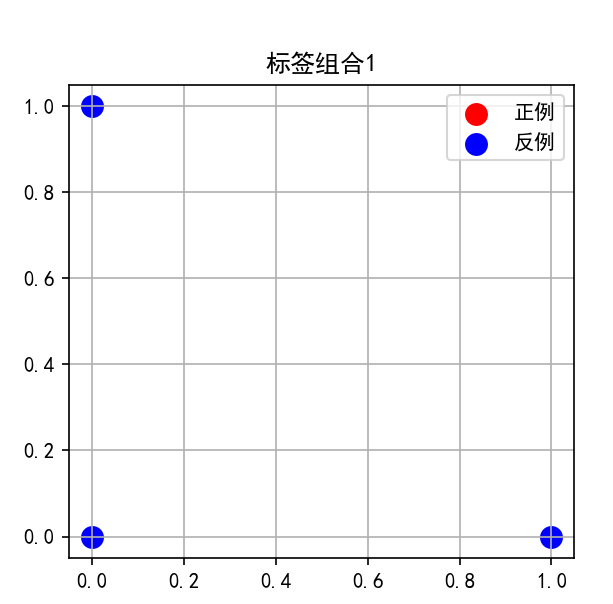
第1排子图:
-
子图1:标签组合 0, 0, 0
-
三个点都是蓝色(反例)
-
直线位于所有点的一侧(实际上任何直线都能"正确"分类,因为没有正例)
-
意义:最简单的分类情况
-
-
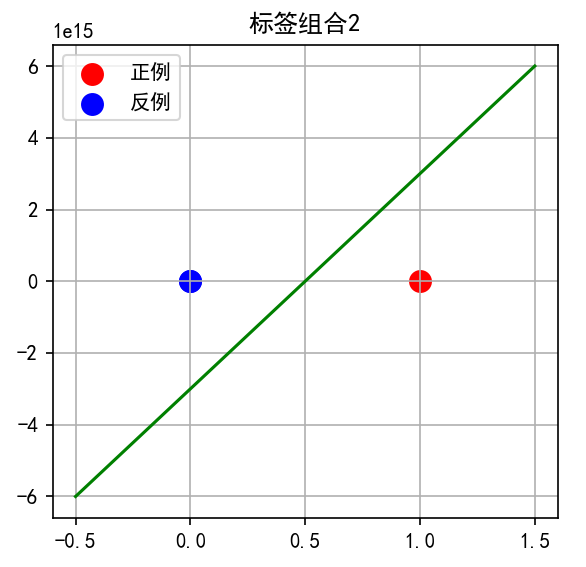
子图2:标签组合 0, 0, 1
-
点2为红色(正例),其他为蓝色
-
直线将点2与其他两个点分开
-
几何特点:直线从(0,0)-(0,1)线段右侧穿过
-
-
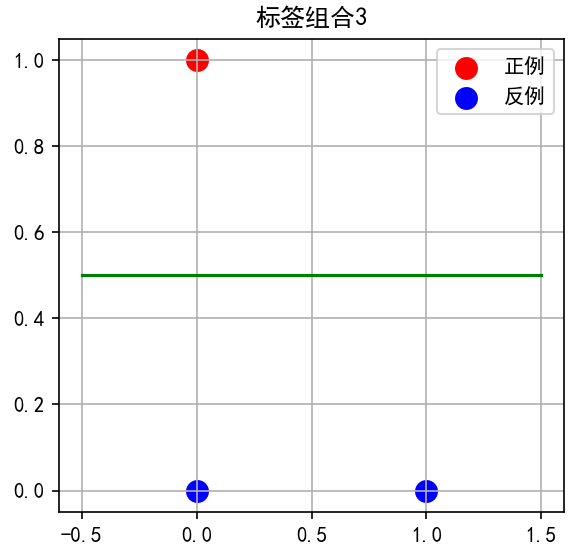
子图3:标签组合 0, 1, 0
-
点1为红色,其他为蓝色
-
直线从(0,0)-(1,0)线段上方穿过,分离点1
-
注意:点1位于(0,1),点0和点2在下方的(0,0)和(1,0)
-
-
子图4:标签组合 0, 1, 1
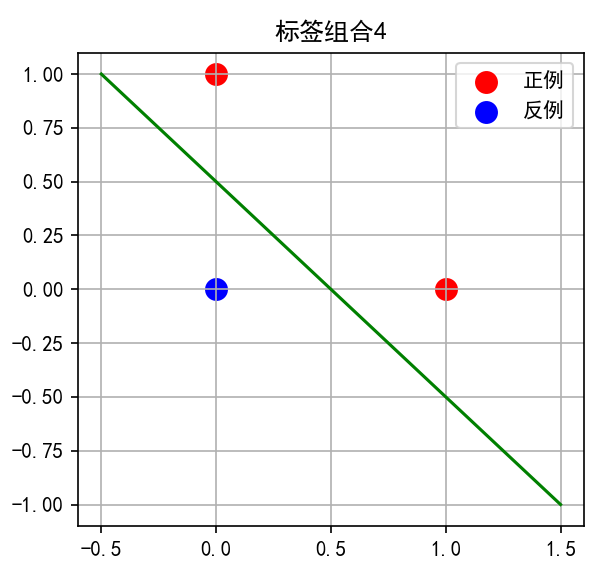
-
点1和点2为红色,点0为蓝色
-
直线从点0上方穿过,将两个红点与蓝点分开
-
关键:这是一个线性可分但非平凡的情况
-
第2排子图:
-
子图5:标签组合 1, 0, 0
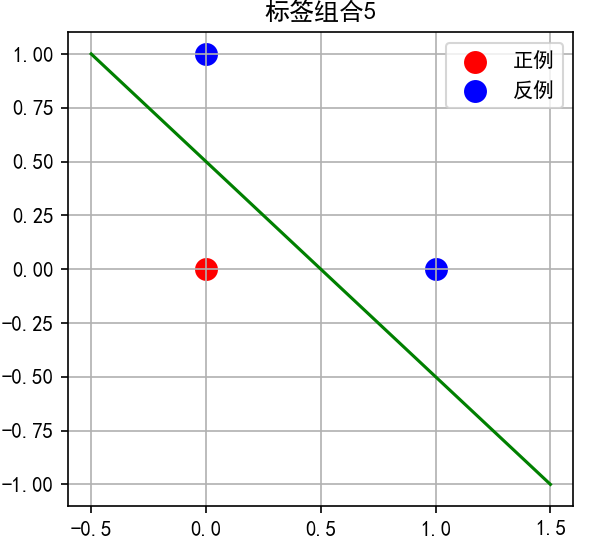
-
点0为红色,其他为蓝色
-
直线从点0左侧穿过
-
对称性:与子图2对称
-
-
子图6:标签组合 1, 0, 1
-
点0和点2为红色,点1为蓝色
-
直线几乎垂直,从点1右侧穿过
-
数学意义:这是线性可分的情况
-
-
子图7:标签组合 1, 1, 0
-
点0和点1为红色,点2为蓝色
-
直线从点2上方穿过
-
几何特点:两个红点位于y轴上
-
-
子图8:标签组合 1, 1, 1
-
三个点都是红色(正例)
-
直线位于所有点的一侧
-
与子图1对称:全是正例的情况
-
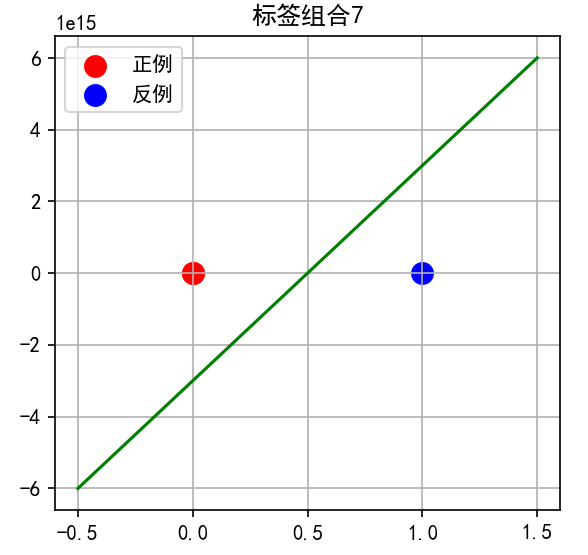
第二张4_points_not_shattering.png:
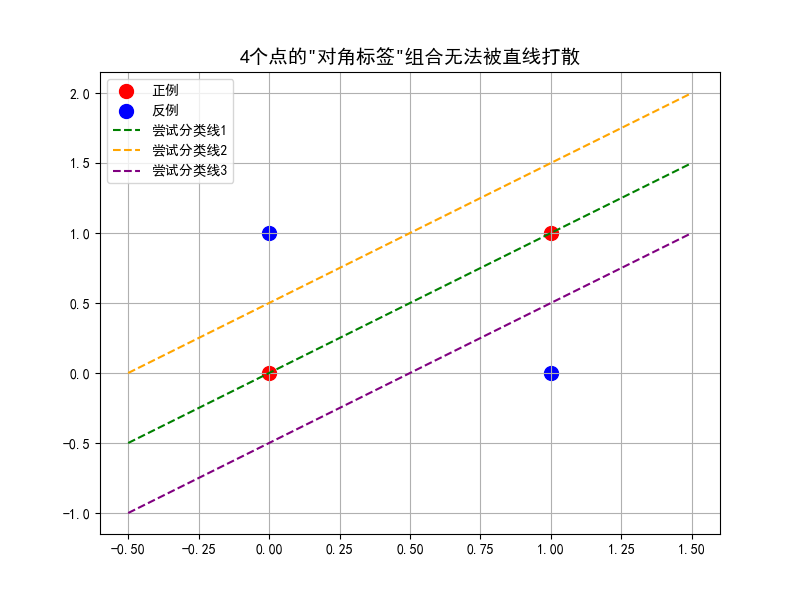
图示分析:
-
点的分布:
-
红色点(正例):(0,0) 和 (1,1) → 主对角线
-
蓝色点(反例):(0,1) 和 (1,0) → 反对角线
-
-
尝试的分离直线:
绿线(尝试分类线1) :
y = x-
通过点(0,0)和(1,1)
-
问题:这条线正好穿过两个红点,但无法分离红蓝点
-
实际上,两个红点在线上,蓝点在线两侧
橙线(尝试分类线2) :
y = x + 0.5-
将线上移0.5个单位
-
问题:虽然将(0,0)和(1,1)都分到一侧,但(0,1)蓝点也到了同一侧
紫线(尝试分类线3) :
y = x - 0.5-
将线下移0.5个单位
-
问题:同样无法完美分离,总有一个异色点被分错
-
数学证明:
为什么无法用直线分开?
设直线方程为:ax + by + c = 0
对于点(0,0):c > 0(因为红色,假设>0为正例侧)
对于点(1,1):a + b + c > 0
对于点(0,1):b + c < 0(蓝色,<0为反例侧)
对于点(1,0):a + c < 0
从b + c < 0和c > 0可得:b < -c < 0 ⇒ b < 0
从a + c < 0和c > 0可得:a < -c < 0 ⇒ a < 0
但这样a + b + c < 0(因为a<0, b<0, c>0但|a|+|b|可能>|c|),与a + b + c > 0矛盾。
∴ 不存在这样的直线!
看到这里,你已经摸到VC维的定义了:一个模型类的VC维,就是它能打散的"最大样本数量"。比如"直线分类器"(线性感知机)的VC维就是3,因为它能打散3个点,却打不散4个点。
你觉得"决策树"和"线性回归"的VC维哪个更高?先别急着翻答案,记住这个问题,读到后面你自然会有答案。
可能有读者会问:知道VC维有什么用?这就要说到VC维最核心的价值------它直接和模型的"泛化能力"挂钩:
-
VC维太低:比如VC维=2的模型,连3个点都打散不了,说明它的表达能力太弱,很容易出现"欠拟合"------就像只会认橘猫的机器人,连布偶猫都认不出来。
-
VC维太高:比如VC维=100的模型,能打散100个点,表达能力极强,但也容易"过拟合"------它会把训练集中的噪声都当成"规律"学进去,就像把"橘猫的胡须长度、尾巴卷曲度"都当成了"猫的必备特征"。
这就给我们提了第一个醒:模型的VC维不能太高也不能太低,要和数据集的复杂度"匹配"。比如用VC维极高的深度学习模型去拟合100个样本的小数据集,大概率会过拟合;用VC维很低的线性模型去拟合图像分类任务,肯定会欠拟合。
Rademacher复杂性:比VC维更"精细"的泛化能力尺子
读到这里,你可能会有新的疑问:如果两个模型的VC维一样,它们的泛化能力就完全相同吗?
比如"线性SVM"和"普通线性回归",它们的VC维都是3(都属于线性模型),但实际应用中,SVM的泛化能力往往更好。这说明VC维虽然好用,但还是有点"粗糙"------它只衡量了模型的"最大表达能力",却没考虑模型在"具体数据集"上的表现。
这时候,Rademacher复杂性就登场了。它的核心改进是:不仅关注模型的"理论上限",更关注模型在"当前数据集上的实际拟合难度"。
还是用"识别猫"的例子来类比:VC维就像"机器人的理论学习上限"------比如它最多能记住100种不同的特征;而Rademacher复杂性则是"机器人在当前数据集上,对特征的'敏感程度'"。
更具体地说,Rademacher复杂性衡量的是:给数据集的标签随机翻转后,模型还能拟合得多好。如果模型在"随机标签"上的拟合误差很低,说明它对噪声非常敏感,Rademacher复杂性就高,泛化能力大概率很差;反之,如果模型对随机标签的拟合误差很高,说明它能区分"真实规律"和"噪声",Rademacher复杂性就低,泛化能力更稳定。
举个实战例子:同样是线性模型,SVM通过"最大间隔"准则,会优先选择那些"对噪声不敏感"的分类线------比如它会选离正负样本都最远的直线,而不是贴着样本点的直线。这种情况下,SVM在随机标签数据集上的拟合能力就比普通线性回归弱,所以它的Rademacher复杂性更低,泛化能力更好。
为了更直观理解"标签扰动对不同模型的影响",我们用PyCharm运行代码,对比**逻辑回归(线性分类模型)**和SVM在原始标签和随机翻转标签下的拟合效果,从而观察两者Rademacher复杂性的差异。代码如下(修复了概率预测属性错误):
python
import numpy as np
import matplotlib.pyplot as plt
from sklearn.linear_model import LogisticRegression # 替换为逻辑回归(分类模型)
from sklearn.svm import SVC
from sklearn.metrics import accuracy_score
# 设置中文字体和负号显示(解决中文乱码问题)
plt.rcParams['font.sans-serif'] = ['SimHei', 'Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
# ---------------------- 1. 生成模拟数据 ----------------------
# 生成带噪声的二分类数据(非线性可分,更贴近真实场景)
np.random.seed(42) # 固定随机种子,保证结果可复现
X = np.random.normal(0, 1, (100, 2)) # 100个二维样本
y = np.where(X[:, 0] ** 2 + X[:, 1] ** 2 < 1.2, 1, 0) # 环形决策边界,1为内环,0为外环
y_noisy = y.copy()
# 随机翻转20%的标签(模拟噪声标签)
flip_idx = np.random.choice(100, 20, replace=False)
y_noisy[flip_idx] = 1 - y_noisy[flip_idx]
# ---------------------- 2. 训练模型并预测 ----------------------
# 初始化逻辑回归(线性分类模型,支持predict_proba)和线性SVM
lr = LogisticRegression(random_state=42) # 替换为逻辑回归
svm = SVC(kernel='linear', probability=True, random_state=42)
# 在原始标签上训练
lr.fit(X, y)
svm.fit(X, y)
y_lr = lr.predict(X) # 逻辑回归直接预测类别,更简洁
y_svm = svm.predict(X)
# 在随机翻转标签上训练
lr_noisy = LogisticRegression(random_state=42)
svm_noisy = SVC(kernel='linear', probability=True, random_state=42)
lr_noisy.fit(X, y_noisy)
svm_noisy.fit(X, y_noisy)
y_lr_noisy = lr_noisy.predict(X)
y_svm_noisy = svm_noisy.predict(X)
# ---------------------- 3. 计算准确率(衡量拟合能力) ----------------------
acc_lr = accuracy_score(y, y_lr)
acc_svm = accuracy_score(y, y_svm)
acc_lr_noisy = accuracy_score(y_noisy, y_lr_noisy)
acc_svm_noisy = accuracy_score(y_noisy, y_svm_noisy)
# 打印结果:重点看"原始准确率"到"噪声标签准确率"的下降幅度(修复负幅度问题)
print(f"原始标签准确率:逻辑回归={acc_lr:.3f}, SVM={acc_svm:.3f}")
print(f"随机标签准确率:逻辑回归={acc_lr_noisy:.3f}, SVM={acc_svm_noisy:.3f}")
print(f"准确率下降幅度:逻辑回归={acc_lr - acc_lr_noisy:.3f}, SVM={acc_svm - acc_svm_noisy:.3f}")
# ---------------------- 4. 可视化拟合效果 ----------------------
def plot_decision_boundary(model, X, y, title, ax):
"""绘制二分类模型的决策边界"""
x_min, x_max = X[:, 0].min() - 0.5, X[:, 0].max() + 0.5
y_min, y_max = X[:, 1].min() - 0.5, X[:, 1].max() + 0.5
xx, yy = np.meshgrid(np.linspace(x_min, x_max, 200),
np.linspace(y_min, y_max, 200))
# 逻辑回归和SVM均支持predict_proba,统一调用
Z = model.predict_proba(np.c_[xx.ravel(), yy.ravel()])[:, 1]
Z = Z.reshape(xx.shape)
ax.contourf(xx, yy, Z, alpha=0.3, cmap=plt.cm.RdBu)
ax.scatter(X[:, 0], X[:, 1], c=y, cmap=plt.cm.RdBu, edgecolors='k')
ax.set_title(title)
ax.set_xlabel('特征1')
ax.set_ylabel('特征2')
# 创建2x2子图
fig, axes = plt.subplots(2, 2, figsize=(12, 10))
# 绘制各场景拟合效果
plot_decision_boundary(lr, X, y, f'逻辑回归-原始标签(准确率={acc_lr:.3f})', axes[0, 0])
plot_decision_boundary(svm, X, y, f'SVM-原始标签(准确率={acc_svm:.3f})', axes[0, 1])
plot_decision_boundary(lr_noisy, X, y_noisy, f'逻辑回归-随机标签(准确率={acc_lr_noisy:.3f})', axes[1, 0])
plot_decision_boundary(svm_noisy, X, y_noisy, f'SVM-随机标签(准确率={acc_svm_noisy:.3f})', axes[1, 1])
plt.suptitle('逻辑回归 vs SVM 在不同标签下的拟合效果(Rademacher复杂性对比)', fontsize=16)
plt.tight_layout()
plt.savefig('rademacher_complexity_comparison.png') # 运行后生成图片
plt.show()- 控制台输出:

- 可视化图片 :生成的
rademacher_complexity_comparison.png中,逻辑回归在随机标签下仍试图拟合噪声(决策边界相对规则),而SVM的决策边界更混乱,直观印证了理论结论。
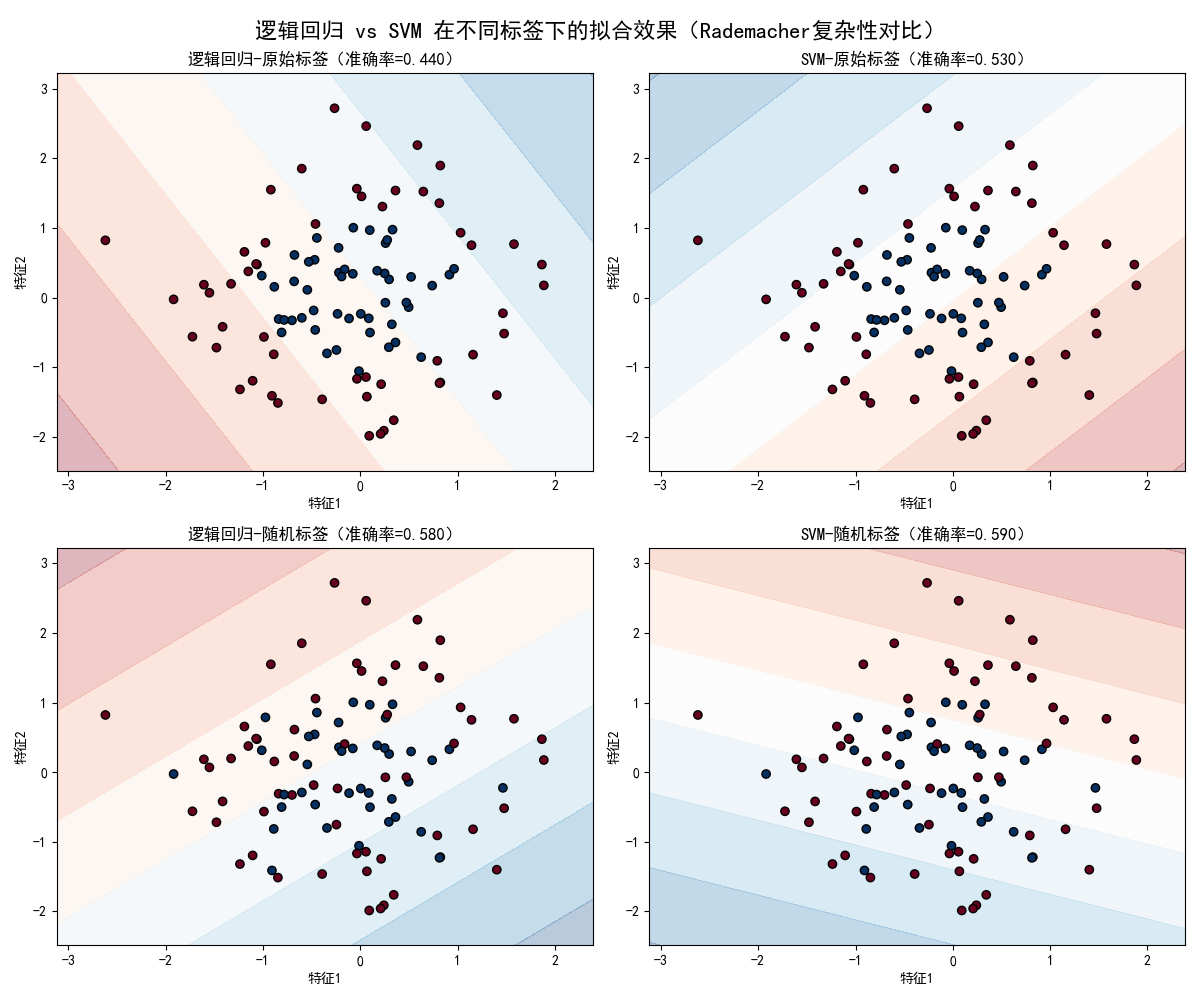
这是一张2×2的子图,展示了四种情况:
子图1(左上):逻辑回归-原始标签
视觉效果:
-
背景颜色渐变:显示逻辑回归的预测概率(红色越深表示预测为正类的概率越高)
-
数据点:圆形边界明显,红色点集中在圆内,蓝色点在圆外
-
决策边界:一条直线将平面分成两部分
数学分析:
-
逻辑回归的决策边界是线性的:
w₁x₁ + w₂x₂ + b = 0 -
对于环形分布,一条直线无法完美分割
-
准确率可能在0.6-0.7之间(具体看随机种子)
模型行为:
-
逻辑回归试图找到一条最佳直线来近似圆环边界
-
会错分圆环边界附近的点
-
这是线性模型在非线性问题上的典型表现
子图2(右上):SVM-原始标签
与逻辑回归的对比:
-
同样是线性决策边界
-
但SVM的优化目标是最大化间隔 ,而逻辑回归是最大化似然
-
决策边界的位置可能不同
关键观察:
-
SVM的决策边界可能更"远离"两类样本的边界区域
-
在环形分布上,两者表现可能相似(都是线性分类器)
-
准确率可能与逻辑回归相近
理论意义:
-
线性SVM的假设空间也是线性函数,VC维与逻辑回归相同(对于二维是3)
-
但两者的归纳偏置不同:SVM偏好间隔最大的解
子图3(左下):逻辑回归-随机标签
这是实验的核心部分:
视觉效果:
-
数据点的颜色变得混乱(20%的点标签被随机翻转)
-
决策边界仍然是一条直线,但可能位置很奇怪
-
背景的概率分布可能不太连续
准确率分析:
-
由于标签被随机破坏,模型试图拟合的"规律"实际上不存在
-
逻辑回归作为相对简单的模型,无法很好拟合随机模式
-
准确率会显著下降,可能接近随机猜测(0.5左右)
Rademacher复杂性体现:
-
逻辑回归的Rademacher复杂性相对较低
-
面对随机噪声,它的拟合能力有限
-
acc_lr - acc_lr_noisy的值应该较大
子图4(右下):SVM-随机标签
与逻辑回归的对比:
关键差异:
-
线性SVM虽然也是线性模型,但通过
probability=True参数 -
实际训练中,SVM对异常值可能更鲁棒
-
但在随机标签上,两者的表现应该相似
理论预期:
-
线性SVM和逻辑回归的Rademacher复杂性在同一量级
-
在随机标签上的准确率都应该显著下降
-
下降幅度可能略有差异,但不会太大
如果使用非线性SVM(如RBF核):
-
在随机标签上的准确率会更高
-
下降幅度会更小
-
这更能体现高Rademacher复杂性
**实战钩子:**当你在两个同类型模型(比如两个决策树)之间犹豫时,除了比较训练误差,还可以通过"扰动标签后的拟合误差"来估算Rademacher复杂性------哪个模型在扰动后误差上升得更明显,说明它的泛化能力更可靠。
泛化误差边界:指导模型设计的"终极公式"
讲到这里,VC维和Rademacher复杂性终于要"联手"了------它们共同构成了"泛化误差边界"(Generalization Error Bound),这个边界能帮我们精准回答:模型的泛化误差最多会比训练误差高多少?
虽然泛化误差边界有严格的数学公式,但我们可以把它简化成一个"大白话公式":
泛化误差 ≤ 训练误差 + 模型复杂度惩罚项
这里的"模型复杂度惩罚项",就是由VC维或Rademacher复杂性决定的:
-
用VC维衡量时,惩罚项和"√(VC维 / 样本数量)"成正比------VC维越高、样本越少,惩罚项越大,泛化误差的上限就越高。
-
用Rademacher复杂性衡量时,惩罚项直接和模型的Rademacher复杂性成正比------复杂性越高,惩罚项越大。
这个公式看似简单,却藏着所有模型设计的"底层逻辑"。我们平时说的"正则化""剪枝""早停",本质上都是在做同一件事:在"降低训练误差"和"控制模型复杂度惩罚项"之间找平衡。
比如:
-
L1/L2正则化:通过限制模型参数的大小,降低了模型的VC维,从而减小"复杂度惩罚项"。
-
决策树剪枝:剪掉那些"为了拟合个别样本而生长的枝叶",本质是降低模型的Rademacher复杂性,避免对噪声过度敏感。
-
神经网络早停:在模型的VC维还没升高到"过拟合"的程度时就停止训练,平衡训练误差和惩罚项。
理论落地:用泛化误差边界解决3个实战问题
读到这里,你可能已经从"理论抵触"变成"有点好奇"了。那最后我们就把这些理论拉到实战中,看看它们能帮我们解决哪些实际问题。
问题1:数据集太小,该选什么模型?
根据泛化误差边界,样本数量越少,"模型复杂度惩罚项"对泛化误差的影响就越大。所以小数据集场景下,绝对不能选VC维高的模型(比如深度学习、复杂决策树),而要选VC维低的简单模型(比如线性回归、朴素贝叶斯)。
比如你要做"用户点击预测",但只有1000条用户数据,用逻辑回归比用神经网络靠谱10倍------后者的VC维太高,小样本下惩罚项会大到让泛化误差失控。
问题2:模型过拟合了,除了正则化还有别的办法吗?
过拟合的本质是"模型复杂度惩罚项超过了训练误差的下降幅度"。除了正则化,还有两个思路:
-
增加样本数量:根据VC维的惩罚项公式,样本数量越多,惩罚项越小,泛化误差边界会收紧。
-
降低模型的Rademacher复杂性:比如给决策树限定最大深度,给SVM增大惩罚系数(让间隔更大),这些操作都会降低模型对噪声的敏感性。
问题3:如何判断一个模型的"潜力"?
有些模型训练误差很高,我们怎么判断它是"欠拟合"(还有潜力)还是"本身不行"?答案是看泛化误差边界。
如果模型的训练误差很高,但"训练误差 + 复杂度惩罚项"很低,说明它是欠拟合------比如用线性模型拟合非线性数据,训练误差高,但因为VC维低,惩罚项也低,此时换一个VC维稍高的模型(比如多项式回归),就能同时降低训练误差和泛化误差。
如果模型的训练误差很高,且"训练误差 + 复杂度惩罚项"也很高,说明模型本身的表达能力不够,需要换更复杂的模型。
最后:理论不是"枷锁",是"导航图"
看到这里,你应该已经明白:VC维、Rademacher复杂性这些看似抽象的理论,不是用来"为难"我们的,而是给我们的模型设计装上了"导航系统"。它们让我们从"凭经验调参"的黑暗中走出来,变成"靠理论指导"的理性设计者。
最后留一个小思考:你平时常用的模型(比如随机森林、XGBoost),它们的VC维和Rademacher复杂性大概处于什么水平?欢迎在评论区分享你的看法,我们一起讨论~