本节将介绍相机、惯性测量单元、激光雷达等常见传感器在具身智能中的工作原理、特点和应用场景,展示它们在智能体感知环境中的重要作用。
一、相机
在具身智能的感知体系中,相机作为"眼睛"发挥着至关重要的作用。它能够捕捉环境中的视觉图像,为具身智能体提供丰富的视觉信息,是实现物体识别、场景理解等功能的关键部件。
相机的成像原理基于小孔成像。最初人们发现小孔成像现象,然后对其进行技术改进,在孔上安装凸透镜聚焦光线,形成现代相机成像基础。相机主要由暗箱、镜头、感光元件等构成。按下快门时,物体反射光线经镜头折射聚焦到图像传感器(感光元件)上,传感器上的数百万像素将光信号转换为电信号,再转换为数字信号,经过影像处理器处理(如锐化、去噪、调色等)后存储并可预览。
不同类型的相机各具特点。单目相机结构简单、成本低,通过二维图像和算法可以估算物体位置和形状,但深度信息获取有限;双目相机模仿人眼视觉,利用视差计算深度信息,更准确地定位物体;深度相机集成直接获取深度功能,如结构光或飞行时间(Time of Flight,TOF),提供更丰富的三维信息。多款相机设备展示如下图所示。

在具身智能应用中,相机的作用广泛。在自动驾驶领域,相机可识别交通标志、行人、其他车辆等,进而判断道路状况,决定行驶策略;在室内服务机器人场景中,相机能识别目标物体及其位置,辅助完成任务,如抓取物品;在智能安防领域,相机可用于监控和识别入侵行为;在工业生产中,相机可用于检测产品质量和缺陷;在农业领域,相机可用于监测农作物生长状况等。
二、惯性测量单元
IMU 是具身智能的"平衡感知器",它通过测量加速度和角速度,实时感知具身智能体自身姿态与运动状态的变化,为教授智能体的稳定运行和精确控制提供关键信息。
IMU 内部含陀螺仪、加速度计和磁力计。
·陀螺仪基于科里奥利效应(Coriolis Effect)。在硅基微机电系统(MEMS)中,驱动质量块以固定频率振动。当器件旋转时,科里奥利力导致质量块在垂直于振动方向产生位移,通过差分电容检测位移量,进而解算角速度。
·加速度计依据牛顿第二定律。物体的加速度使内部质量块位移,导致其与固定电极之间的电容值变化。通过检测差分电容值(ΔC),可计算加速度值。
·磁力计基于霍尔效应。通电时,磁场使电子移动,从而产生电场,通过测量电场强度可计算磁场强度。
在具身智能中,IMU 在机器人运动控制方面具有重大意义。例如,无人机在启动、加速、转向时,IMU 实时反馈状态,控制系统根据这些信息调整状态,确保飞行稳定。在机器人行走于复杂地形或执行动态任务时,IMU 也能及时提供运动状态,保障控制精度。当其他传感器失效时(如 GNSS 信号被遮挡、视觉特征不明显),IMU 短期数据可维持机器人的基本姿态和运动判断,防止智能体失控。在虚拟现实游戏中,IMU 可用于实时监测玩家的身体姿态和运动状态,为游戏提供更真实的体验。在航空航天领域,IMU 可用于飞行器的导航和姿态控制。在医疗领域,IMU 可用于康复治疗和运动监测等。
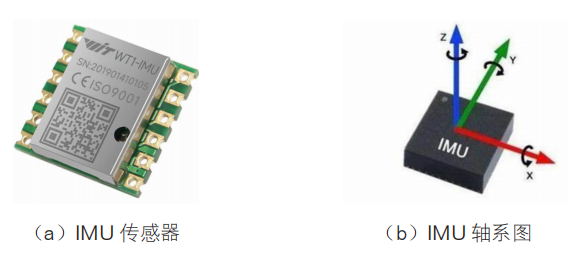
IMU 传感器及其轴系示意图如下图所示。
三、激光雷达
激光雷达是具身智能的"空间测绘仪",它通过激光束扫描环境获取点云数据,为具身智能体构建精确环境地图、实现安全导航和高效避障提供有力支持。
激光雷达的工作原理为:激光发射机发射光脉冲,光脉冲遇目标反射后被光学接收机接收并转换为电脉冲,传输至信息处理系统。测距原理包括飞行时间法(TOF)和调频连续波法(FMCW)。
·TOF 法:通过测量发射与回波的时间差,结合光速计算距离,具有速度快、精度高的特点。
·FMCW 法:将发射光频进行调制,通过回波与参考光的相干混频获取频率差,间接推算飞行时间以确定距离。
在具身智能应用中,激光雷达在多个领域发挥关键作用。在自动驾驶场景下,当车辆进入陌生区域时,激光雷达快速扫描周围环境,构建三维地图,为导航规划路线;在行驶中实时检测障碍物(如其他车辆、行人、路边障碍物等),提前避让,保障安全。在仓储物流中,搬运机器人依靠激光雷达导航,精准避障,高效完成货物搬运任务。
激光雷达与自动驾驶车辆应用展示如下图所示。

四、角雷达
在具身智能的感知体系中,角雷达是一种重要的传感器。它主要用于测量物体的角度和速度信息,为具身智能体提供关键的感知数据。角雷达的工作原理基于电磁波的反射和多普勒效应。当电磁波发射出去遇到物体时,会被反射回来,通过对反射波的分析,角雷达可以快速、准确地确定物体的角度和速度。与其他传感器相比,角雷达在复杂环境下具有更好的适应性和可靠性。例如,在恶劣天气条件下,角雷达能够不受影响地工作,为智能体提供稳定的感知数据。
在具身智能应用中,角雷达用途广泛。例如,在自动驾驶汽车中,角雷达可以检测车辆周围的障碍物和其他车辆的位置、速度及方向,帮助车辆安全行驶和避障;在智能机器人的运动控制中,角雷达可以实时监测机器人的运动状态,通过精确测量角度和速度,实现机器人的精准定位和运动控制。
在实际应用中,角雷达通常与其他传感器如相机、激光雷达等结合使用。通过多传感器融合,能够更全面地获取环境信息,提高智能体的感知能力和决策水平,为智能体的运动控制和安全保障提供有力支持。
汽车传感器与智能驾驶场景如下图所示。

五、全球卫星定位系统
全球导航卫星系统(Global Navigation Satellite System,GNSS)接收机是具身智能在户外环境中的"导航灯塔"。它基于卫星信号为具身智能体提供绝对位置信息,是实现长距离导航和精准定位的重要保障。
GNSS 卫星生成由伪随机噪声码(PRN 码)、载波信号和导航电文组成的复合定位信号,并持续向地面广播。地面接收机通过天线接收多颗卫星信号的叠加波,经射频前端处理(下变频、数字化采样)后,由基带处理器进行信号捕获、信号分离、跟踪环路和数据解调,最终输出数据并解算定位结果及精度信息。
在具身智能应用方面,以户外巡检机器人为例,当它在开阔环境运行时,接收至少 4 颗卫星的信号,通过后方交会确定自身坐标。机器人借此规划从起始点到目标点的最优路径,并实时监控位置,确保按规划路线行进。在农业无人机植保作业中,GNSS 接收机为无人机提供精确位置,使其按预设航线飞行,精准作业,避免重复或遗漏区域。
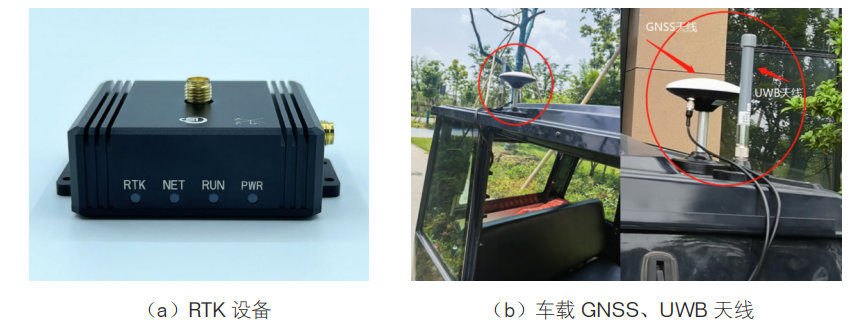
高精度定位设备及车载天线配置展示如下图所示。
六、轮速传感器
轮速传感器在具身智能的轮式运动系统中扮演着"运动节奏监测者"的角色。它基于电磁感应或霍尔效应工作,为机器人的运动控制提供精确的车轮速度信息,是实现稳定运动、精准定位和安全导航的基础要素之一。
轮速传感器的工作原理因类型而异。电磁感应式轮速传感器在车轮齿圈转动时,磁通量周期性变化产生感应电动势,其频率与车轮转速成正比;霍尔效应式轮速传感器则利用霍尔元件在磁场变化时产生的霍尔电压变化检测车轮转速。
在具身智能应用中,轮速传感器的作用体现在多个方面。在机器人直线行驶时,轮速传感器实时监测车轮速度,确保机器人按照预设速度稳定前行,就像汽车的速度表为驾驶员提供实时速度信息一样。当机器人需要转弯时,轮速传感器精确测量每个车轮的转速差异,控制系统根据这些数据调整车轮的驱动力,使机器人能够平稳、精准地转弯,避免侧滑或失控。例如,搬运机器人在仓库搬运货物时,需要在狭窄通道内转弯,轮速传感器与转向控制系统协同工作,保证机器人安全通过。
在不同路况下,轮速传感器也能发挥重要作用。在平滑路面上,轮速传感器能准确测量车轮速度,为机器人的速度控制提供可靠依据。在颠簸路面上,尽管车轮会因路面不平整而产生跳动,但传感器凭借其快速响应能力,依然可以准确获取车轮的平均转速,并通过算法过滤掉因颠簸产生的速度波动,确保速度数据的有效性。在湿滑路面上,轮速传感器配合防滑控制系统,当检测到车轮打滑导致转速异常增加时,及时反馈信息,使控制系统降低驱动力或采取制动措施,从而保障机器人的行驶安全。
轮速传感器的数据还在机器人的定位和导航中起到关键作用。在航位推算算法中,轮速数据用于计算机器人的相对位移和姿态变化。与其他传感器(如GNSS、IMU等)的数据融合时,轮速传感器的数据能够补充和修正其他传感器在特定场景下的误差。例如,在卫星信号受遮挡的峡谷环境中,GNSS 定位精度下降,此时结合轮速传感器和 IMU 的姿态数据,可以维持机器人的短期定位精度,确保机器人在复杂环境下的连续导航能力。
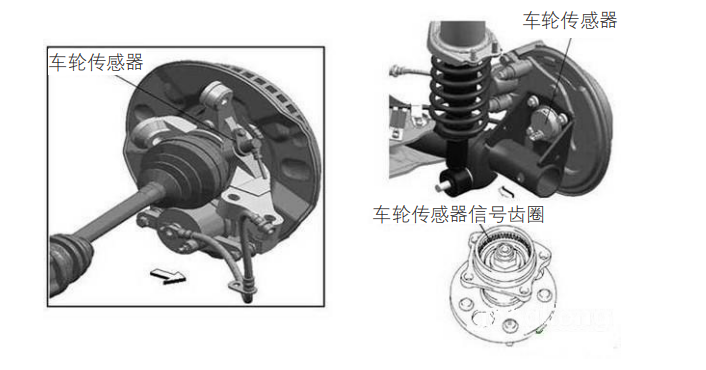
车轮传感器及其关联部件示意图如下图所示。
七、超声波传感器
超声波传感器犹如智能体的"近场守护者",它利用超声波特性探测周围环境,在近距离感知、障碍物检测和安全防护等方面具有不可或缺的作用。
超声波传感器基于超声波的发射与接收原理工作。它发射出特定频率的超声波,当超声波遇到障碍物时反射回来,传感器接收反射波,并根据发射与接收的时间差计算出与障碍物的距离。超声波传感器的工作频率范围影响其探测效果,高频超声波适合短距离高精度探测,如在机器人抓取小型精密零件时,高频传感器能够精确检测零件位置;低频超声波则适合长距离大范围探测,像在大型仓库中,机器人利用低频超声波传感器可以提前感知远处大型障碍物的大致位置。
在障碍物检测方面,超声波传感器具有独特的优势和应用策略。当机器人在未知环境中移动时,超声波传感器持续发射超声波并监测反射波。通过分析回波时间和强度,不仅能判断障碍物的距离,还能根据反射波的特征初步判断障碍物的类型(如硬物体反射波强且清晰,软物体反射波相对较弱且模糊)和大小(较大物体反射波覆盖范围广,多个传感器接收时间差异小)。在复杂环境中,多个超声波传感器协同工作,形成一个近距离感知网络。例如在家庭服务机器人中,机身周围布置多个超声波传感器,当机器人靠近家具或墙壁时,传感器及时检测到距离变化,为机器人的运动控制提供实时反馈,使其能够避免碰撞,从而安全地在室内环境中穿梭。
在近距离环境感知中,超声波传感器的作用尤为突出。在狭窄空间内,如机器人在管道或狭小通道中执行任务时,其他传感器(如激光雷达、相机等)可能因视野受限或光线不足而无法有效工作,超声波传感器则不受这些因素的影响,能够准确探测周围近距离的障碍物,为机器人的导航提供关键信息。与其他近距离传感器(如触觉传感器)配合时,超声波传感器可以提前预警可能的碰撞风险,触觉传感器则在接触瞬间提供精确的力反馈信息,两者协同工作,能够提高机器人在复杂近距离操作中的安全性和精确性。
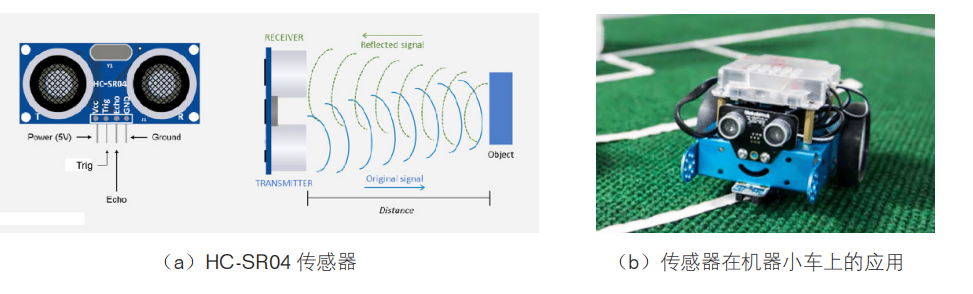
超声波传感器原理与应用展示如下图所示。
本篇文章到此结束啦,其他更多知识请关注我不迷路哦!
本文摘自《具身智能:从理论到实践》,具体内容请以书籍为准。