Issac sim安装
这里是安装要求,包含推荐的GPU,和驱动版本。https://docs.isaacsim.omniverse.nvidia.com/5.1.0/installation/requirements.html#system-requirements
这里是快速安装方法,下载安装包,执行几个命令就可以跑了。
https://docs.isaacsim.omniverse.nvidia.com/5.1.0/installation/quick-install.html#quick-install
打开仿真界面:
在extention里,启动isaacsim.replicator.agent.core and isaacsim.replicator.agent.ui。
打开经典仓库地图:
在Actor SDG下,在Scene Asset Path下输入,https://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/Isaac/5.1/Isaac/Environments/Simple_Warehouse/full_warehouse.usd
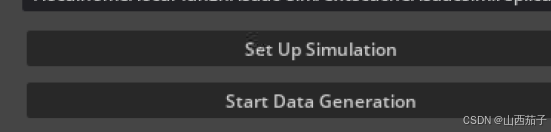
点Set Up Simulation.
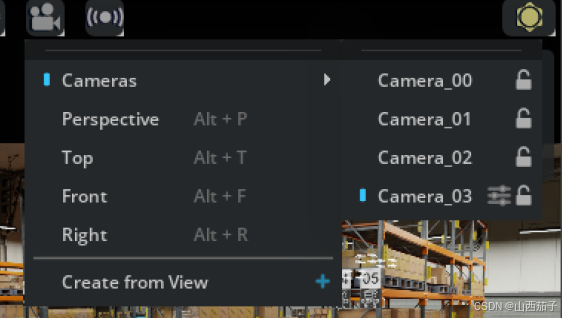
调整摄像头位置
有时候移动鼠标,摄像头位置不知道到哪里了。点Stage,输入camera,点回车,选中要操作的摄像头,下面编辑框的Translate就是x,y,z的位置。Orientation就是朝向。可以点击如下界面进行预览。
怎么操作事件
把如下两个event打开。

如果不修改参数,就直接点Set Up Events, 再点播放,就可以看到模型视频,如果需要修改参数,切到Event Scene Tagger页,选中目标,点UntagLooseItems,就是取消,再选中目标,点NavMesh,就是确定。
怎么新加事件
切到Event Config File, 点add, 该参数见上一节。
怎么录视频
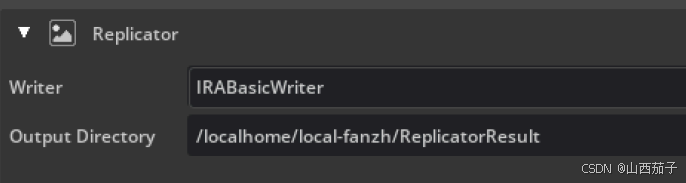
切到Actor SDG 点播放,点 Start Data Generation,就生成PNG文件,在Replicator下可以修改路径。最后可以用ffmpeg生成录像,如下代码:
#!/bin/bash
cd _World_Cameras_Camera_00/rgb
ffmpeg -r 15 -i rgb_00%3d.png -vcodec h264 -r 15 -pix_fmt yuv420p -s 1920x1080 cam_00.mp4 -y && mv cam_00.mp4 ../../
cd ../../_World_Cameras_Camera_01/rgb
ffmpeg -r 15 -i rgb_00%3d.png -vcodec h264 -r 15 -pix_fmt yuv420p -s 1920x1080 cam_01.mp4 -y && mv cam_01.mp4 ../../
cd ../../_World_Cameras_Camera_02/rgb
ffmpeg -r 15 -i rgb_00%3d.png -vcodec h264 -r 15 -pix_fmt yuv420p -s 1920x1080 cam_02.mp4 -y && mv cam_02.mp4 ../../
cd ../../_World_Cameras_Camera_03/rgb
ffmpeg -r 15 -i rgb_00%3d.png -vcodec h264 -r 15 -pix_fmt yuv420p -s 1920x1080 cam_03.mp4 -y && mv cam_03.mp4 ../../