技术栈
UE5 笔记敌人自动追踪
会思考的猴子
2025-12-20 21:39
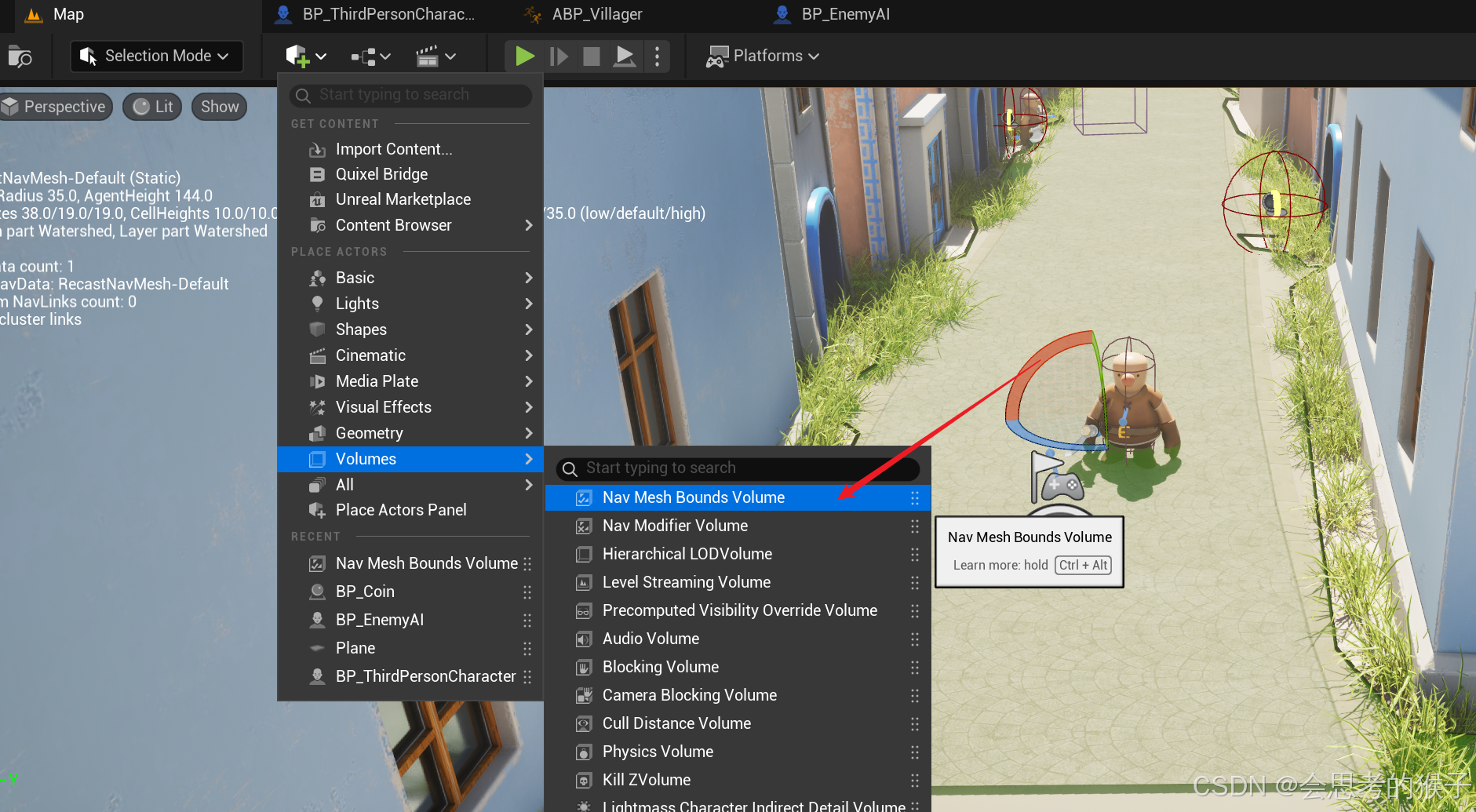
1.场景添加 NavMeshBoundsVolume,设置Ai 追踪区域,按P键可以预览 开关预览区域
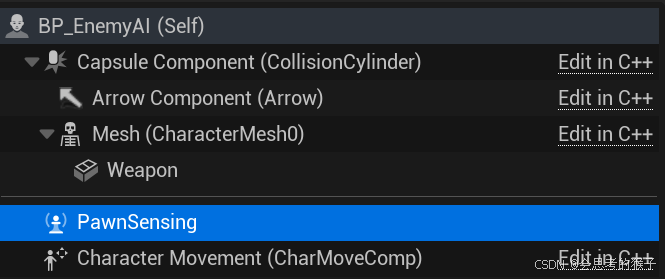
AI 敌人身上添加 PawnSensing 可以调节追踪角度等
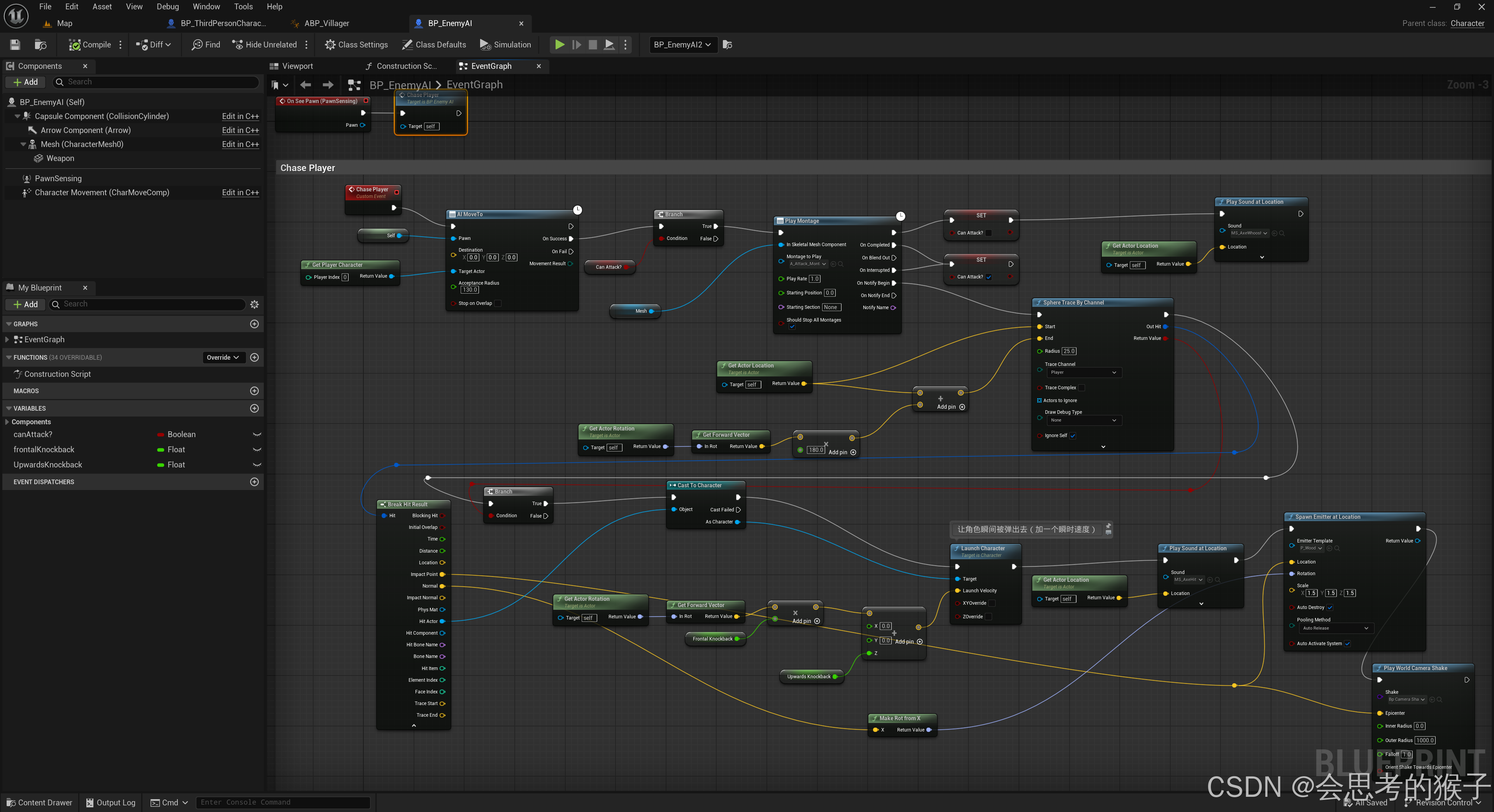
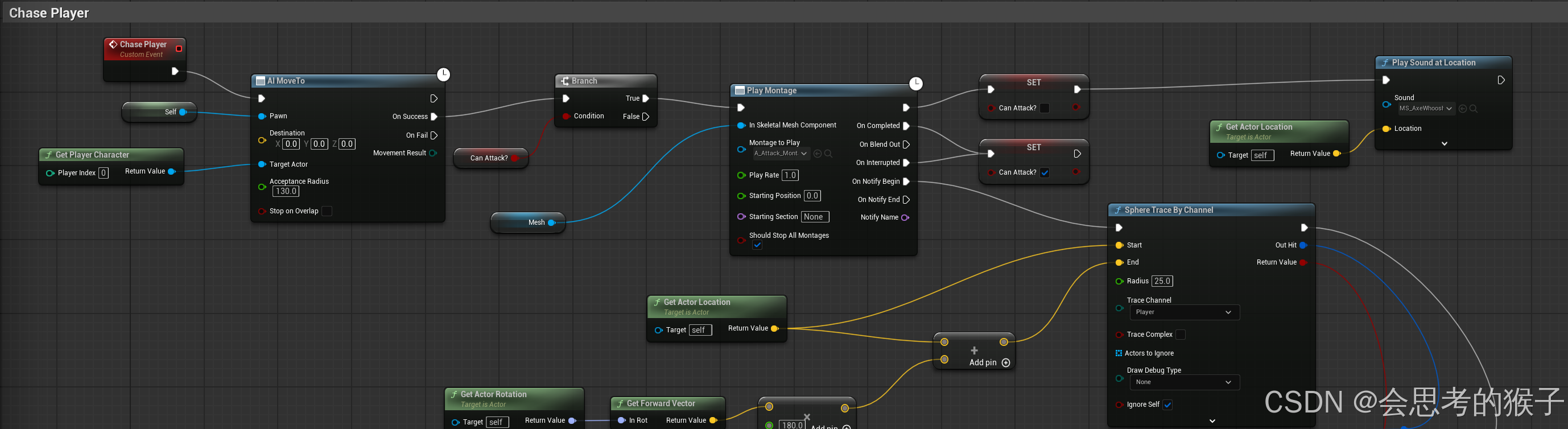
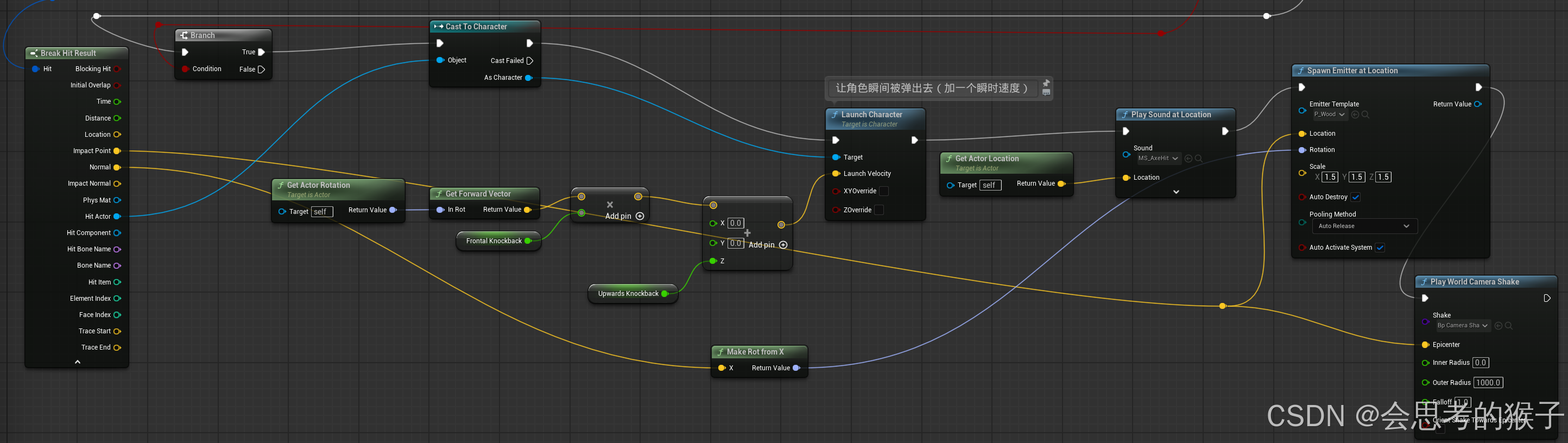
AI追踪玩家蓝图
笔记
ue5
上一篇:
Java如何不建表完成各种复杂的映射关系(鉴权概念、区域概念、通用概念)
下一篇:
Zemax 车载前视ADAS镜头
相关推荐
沐苏瑶
41 分钟前
计算机网络核心笔记:打通 TCP/UDP 与 HTTP/HTTPS 底层逻辑(重点上)
笔记
·
计算机网络
·
http
·
https
谙弆悕博士
13 小时前
信息系统项目管理师教程(第4版)笔记——第 2 章 信息技术发展
笔记
·
职场和发展
·
软考高级
·
软考
·
高项
·
项目经理
wp123_1
14 小时前
【硬件选型笔记】TONEVEE MVL4020-1R2M 与Coilcraft XAL4020-122MEC 大电流功率电感参数深度解析
笔记
aaaameliaaa
14 小时前
指针之总结
c语言
·
笔记
·
算法
撩得Android一次心动
15 小时前
Linux编程笔记3【个人用】
linux
·
笔记
撩得Android一次心动
17 小时前
Linux编程笔记4【个人用】
linux
·
笔记
·
学习
xqqxqxxq
18 小时前
技术笔记:上下文工程(Context Engineering)心得总结(李博杰《深入理解 AI Agent》2.1,2.2观后总结)
人工智能
·
笔记
mengzhi啊
21 小时前
UE5关卡切换 传统加载(阻塞)vs流式加载(非阻塞)。还有加载关卡3种办法
ue5
一只小菜鸡..
1 天前
南京大学 操作系统 (JYY) 学习笔记:导论与历史的轮回 (OS Introduction)
笔记
·
学习
xqqxqxxq
1 天前
LeetCode Hot100 双指针专项题解笔记
笔记
·
算法
·
leetcode
热门推荐
01
如何新建文件夹? 电脑新建文件夹的4种方法
02
GitHub 镜像站点
03
2026年7月AI圈大地震:GPT-5.6被政府限制、Claude入驻Slack、Anthropic自研芯片
04
AI科技热点日报 | 2026年07月01日
05
国内可直接用、免费额度/永久免费的大模型API清单(含 SiliconFlow、火山、阿里、智谱、百度、Kimi、DeepSeek、DMXAPI 等)
06
AI 编程 IDE 全景解析 2026:Agent 全面接管开发链路
07
幻兽帕鲁 - 服务器管理员权限与 GM 命令完全指南
08
2026 国产 AI 大模型横评:DeepSeek、通义千问、Kimi、文心一言、星火、豆包谁更能打?
09
微信历史版本含下载地址( Windows PC | 安卓 | MAC )及设置微信不更新
10
2026 年 AI 大模型 & AI 编程工具实战全总结