核心在于回答一个问题:我们如何在图像中找到独特且可重复使用的点(特征)?这是实现图像配准、拼接和识别的基础。
为什么需要局部特征?
局部特征(例如角点和团块)是计算机视觉中用于连接不同视角图像的关键"粘合剂":
- 全景图拼接: 提取特征、匹配特征、配准图像是自动化全景图拼接的三大步骤。
- 应用广泛: 特征点可用于图像配准、3D 重建、运动跟踪(如用于增强现实)、目标识别以及机器人/汽车导航等领域。
- 局部特征的优点: 局部性意味着特征对遮挡 和杂乱场景具有鲁棒性。它们数量大,一张图中可以有成百上千个;同时,它们具有判别性,能够区分大量的目标。
提取特征的主要步骤包括:
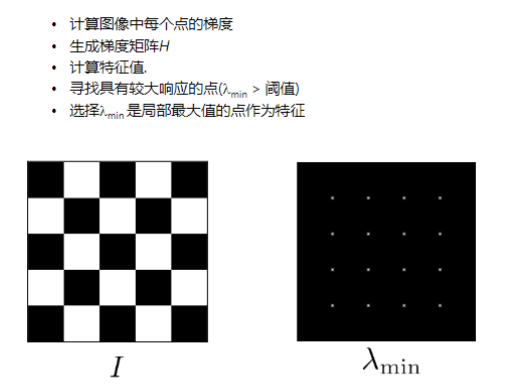
- 特征检测: 确认特征点(找到它),。
- 特征描述: 围绕每个特征点提取向量(表示它),。
- 特征匹配: 确定两个视角特征描述子之间的对应关系(匹配它)。
局部特征的优点
- 局部性
特征是局部的,对遮挡和杂乱场景具有鲁棒性 - 数量大
一张图中有成百上千的局部特征 - 判别行
可以区分大量目标 - 效率
可以获得实时效果
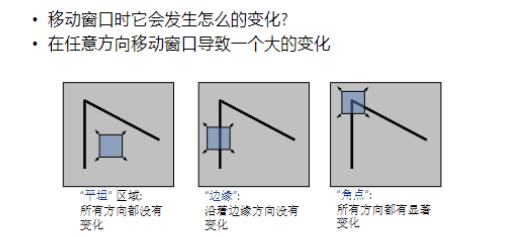
什么是好的特征?
一个好的特征点必须具有唯一性 ,即它是一个独特的图像区域 ,能够获得与其他图像无歧义的匹配
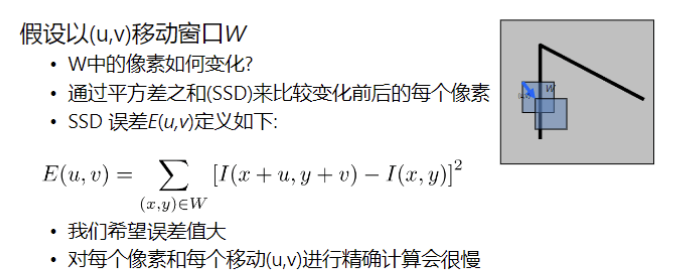
唯一性的局部度量(滑动窗口分析)
Harris 角点检测:数学原理
Harris 角点检测器就是基于上述"在所有方向上移动窗口都会导致一个大的变化"的思想构建的。
A. 二阶矩矩阵 HHH
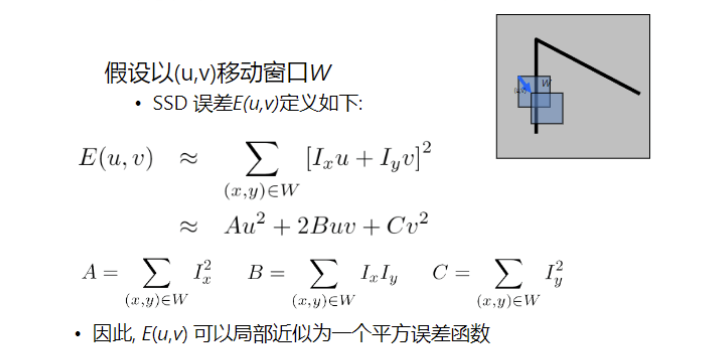
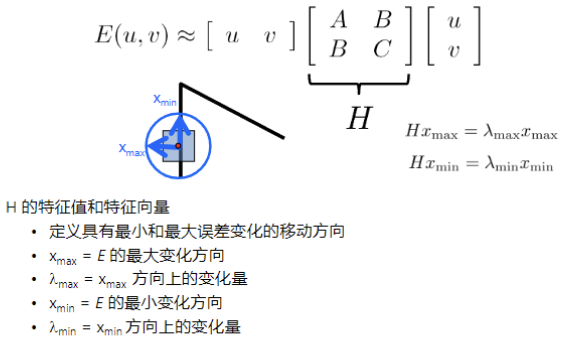
Harris 算子的核心是通过泰勒展开式的一阶近似,将 SSD 误差 E(u,v)E(u, v)E(u,v) 局部近似为一个二次型。
这个二次型与一个 2×22 \times 22×2 的二阶矩矩阵 HHH 相关联,这个 HHH 矩阵包含了图像在 xxx 和 yyy 方向的梯度平方和交叉乘积的局部平均,。
E(u,v)≈uvHu vE(u, v) \approx \begin{bmatrix} u & v \end{bmatrix} H \begin{bmatrix} u \ v \end{bmatrix}E(u,v)≈uvHu v
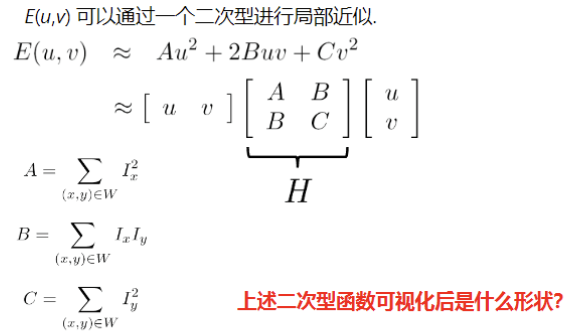
这里 Ix,IyI_{x}, I_{y}Ix,Iy为梯度
- A=∑Ix2A = \sum I_x^2A=∑Ix2: 把窗口里所有像素的水平梯度的平方加起来。
- C=∑Iy2C = \sum I_y^2C=∑Iy2: 把窗口里所有像素的垂直梯度的平方加起来。
- B=∑IxIyB = \sum I_x I_yB=∑IxIy: 把窗口里每个像素的"水平梯度 ×\times× 垂直梯度"加起来
B. 特征值与角点分类
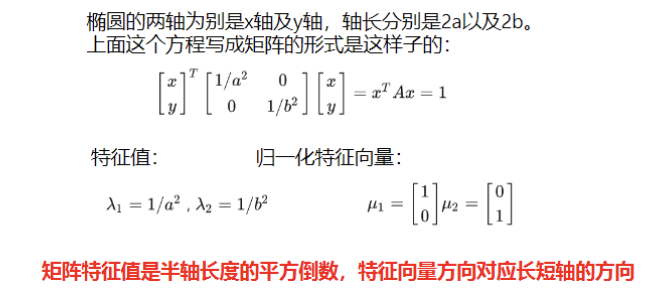
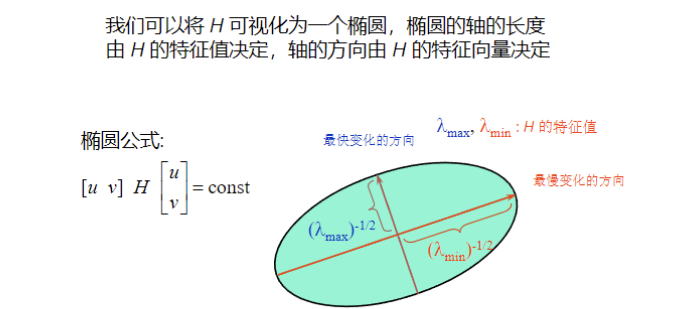
矩阵 HHH 的特征值 (λ1\lambda_1λ1 和 λ2\lambda_2λ2) 决定了误差二次型的形状:
- 特征值 决定了椭圆轴的长度,即最小和最大误差变化的量。
- 特征向量 决定了轴的方向,即最小和最大变化的方向 。
利用 λ1\lambda_1λ1 和 λ2\lambda_2λ2 的值,可以对图像点进行准确分类:
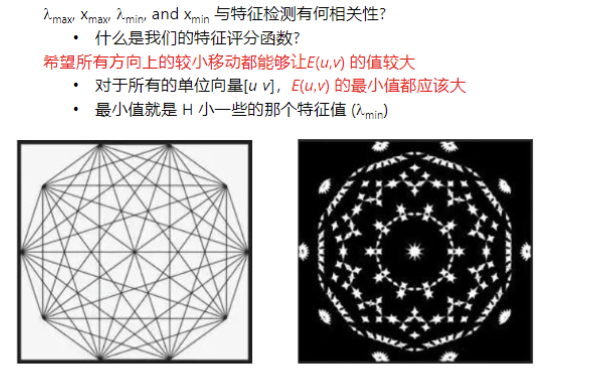
特征值关系区域类型图像变化λ1\lambda_1λ1 和 λ2\lambda_2λ2 均小"平坦"区域 EEE 几乎是常量。λ1≫λ2\lambda_1 \gg \lambda_2λ1≫λ2 (或反之)"边缘" EEE 仅在一个方向上有大变化。λ1\lambda_1λ1 和 λ2\lambda_2λ2 均大 ,且 λ1≈λ2\lambda_1 \approx \lambda_2λ1≈λ2**"角点"** EEE 在所有方向上都有增长变化。为了找到角点,我们希望所有方向上的最小移动都能让 E(u,v)E(u, v)E(u,v) 的值较大,这意味着 HHH 较小的那个特征值 (λmin\lambda_{min}λmin) 必须大。
角点检测总结
C. Harris 算子(R Score)
虽然 λmin\lambda_{min}λmin 是理论上最佳的角点评分,但 Harris 算子(Harris Detector)使用了一个计算上更简单的近似公式 RRR。
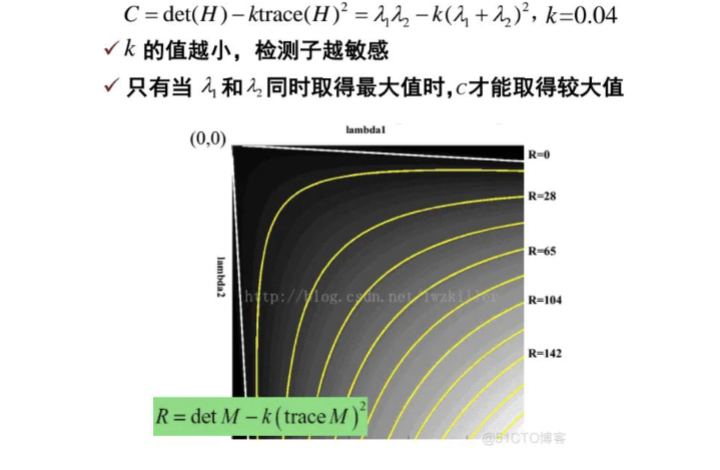
R=det(H)−αtrace(H)2R = \operatorname{det}(H) - \alpha \operatorname{trace}(H)^2R=det(H)−αtrace(H)2
通过计算每个像素的 RRR 值,并寻找 RRR 值大且是局部最大值 的点,即可检测出 Harris 特征(角点)。
或者写成特征值的形式:
R=λ1λ2−k(λ1+λ2)2R = \lambda_1 \lambda_2 - k (\lambda_1 + \lambda_2)^2R=λ1λ2−k(λ1+λ2)2
- kkk 是什么? 是一个经验常数,通常取 0.040.040.04 到 0.060.060.06。
这个函数 RRR 怎么评分?
-
如果是角点 (λ1,λ2\lambda_1, \lambda_2λ1,λ2 都很大):
-
乘积 λ1λ2\lambda_1 \lambda_2λ1λ2 会变得超级大(远大于和的平方)。
-
结果:RRR 是很大的正数。
-
-
如果是边缘 (一个大一个小):
-
假设 λ1\lambda_1λ1 很大,λ2≈0\lambda_2 \approx 0λ2≈0。那么乘积 ≈0\approx 0≈0,但和的平方很大。
-
结果:RRR 是很大的负数。
-
-
如果是平坦区域 (都小):
-
乘积和小都很小。
-
结果:RRR 接近 0。
-
导数加权
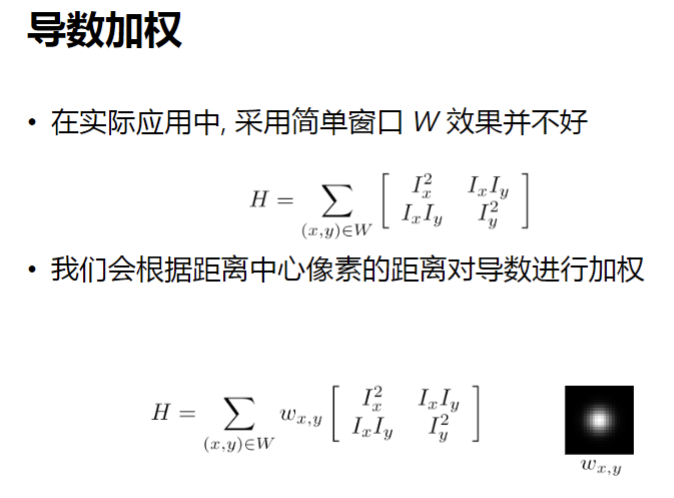
这张图的核心思想是:为了让角点检测更稳定、且不管图片怎么旋转都能检测出来(旋转不变性),我们不能搞"大锅饭"(方框滤波),而要搞"核心制"(高斯加权)。
- 旧方法: 所有人平等投票 →\rightarrow→ 容易受干扰,对旋转敏感。
- 新方法: 离中心近的 VIP 票数多,离得远的票数少 →\rightarrow→ 结果更稳定,且高斯函数是圆的,转起来也没影响。
1. 上半部分:为什么简单的窗口不好?
(Top Equation: Simple Window)
H=∑(x,y)∈WIx2IxIyIxIyIy2H = \sum_{(x,y) \in W} \begin{bmatrix} I_x^2 & I_x I_y \\ I_x I_y & I_y^2 \end{bmatrix}H=(x,y)∈W∑Ix2IxIyIxIyIy2
-
做法: 这里用的是最普通的求和 (∑\sum∑)。这意味着窗口 WWW 里(比如 5×55 \times 55×5 的方框)的每一个像素,权重都是 1。
-
问题 (In practice, not good):
-
不够圆(各向异性): 你的窗口是个正方形的盒子。如果一张图片旋转了 45 度,原本在正方形角上的像素可能就跑出去了。这意味着你的算法对"旋转"非常敏感,转一下图片,角点可能就找不到了。
-
噪声干扰: 窗口边缘的像素影响太大。只要一个噪点滑进这个方框的边缘,它立刻拥有 100% 的话语权,会导致计算结果突然跳变。
-
2. 下半部分:导数加权 (Derivative Weighting)
(Bottom Equation: Gaussian Window)
H=∑(x,y)∈Wwx,yIx2IxIyIxIyIy2H = \sum_{(x,y) \in W} \color{red}{w_{x,y}} \begin{bmatrix} I_x^2 & I_x I_y \\ I_x I_y & I_y^2 \end{bmatrix}H=(x,y)∈W∑wx,yIx2IxIyIxIyIy2
-
做法: 引入了一个权重系数 wx,yw_{x,y}wx,y。
-
图示 (右下角的发光圆点): 那个黑背景中间亮白色的图,就是一个高斯核 (Gaussian Kernel)。
-
中心最亮 (权重最大): 靠近窗口中心的像素,最能代表"这里的情况",所以给它们最高的权重。
-
边缘变暗 (权重衰减): 离中心越远的像素,关系越疏远,权重逐渐降低。
-