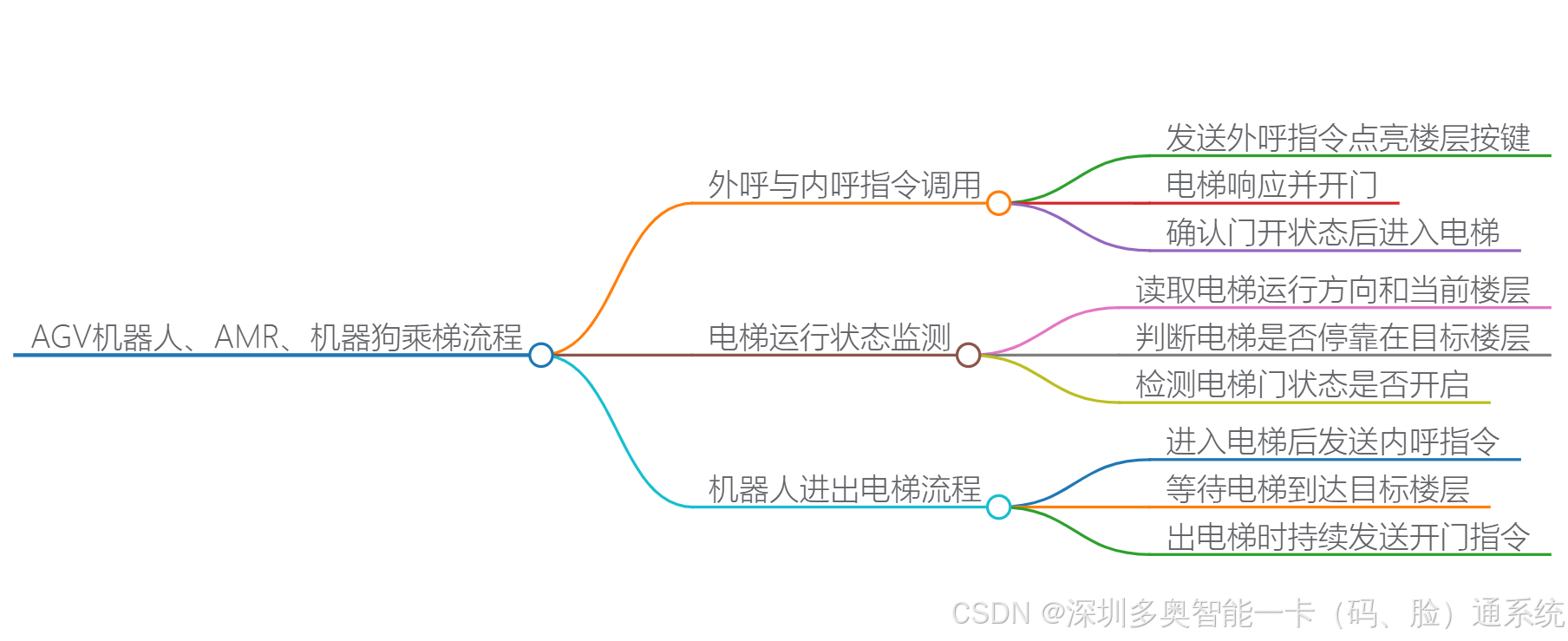
以下是AGV机器人、AMR及机器狗乘梯的完整技术说明,结合引用内容和行业实践整理:
一、乘梯全流程
mermaid
graph TD A[AGV到达电梯厅] --> B{外呼阶段} B --> C[激光雷达定位呼叫区域] C --> D[发送外呼指令] D --> E[电梯响应并开门] E --> F[AGV进入轿厢] F --> G{内召阶段} G --> H[发送目标楼层指令] H --> I[电梯运行至目标层] I --> J[AGV离开轿厢]
-
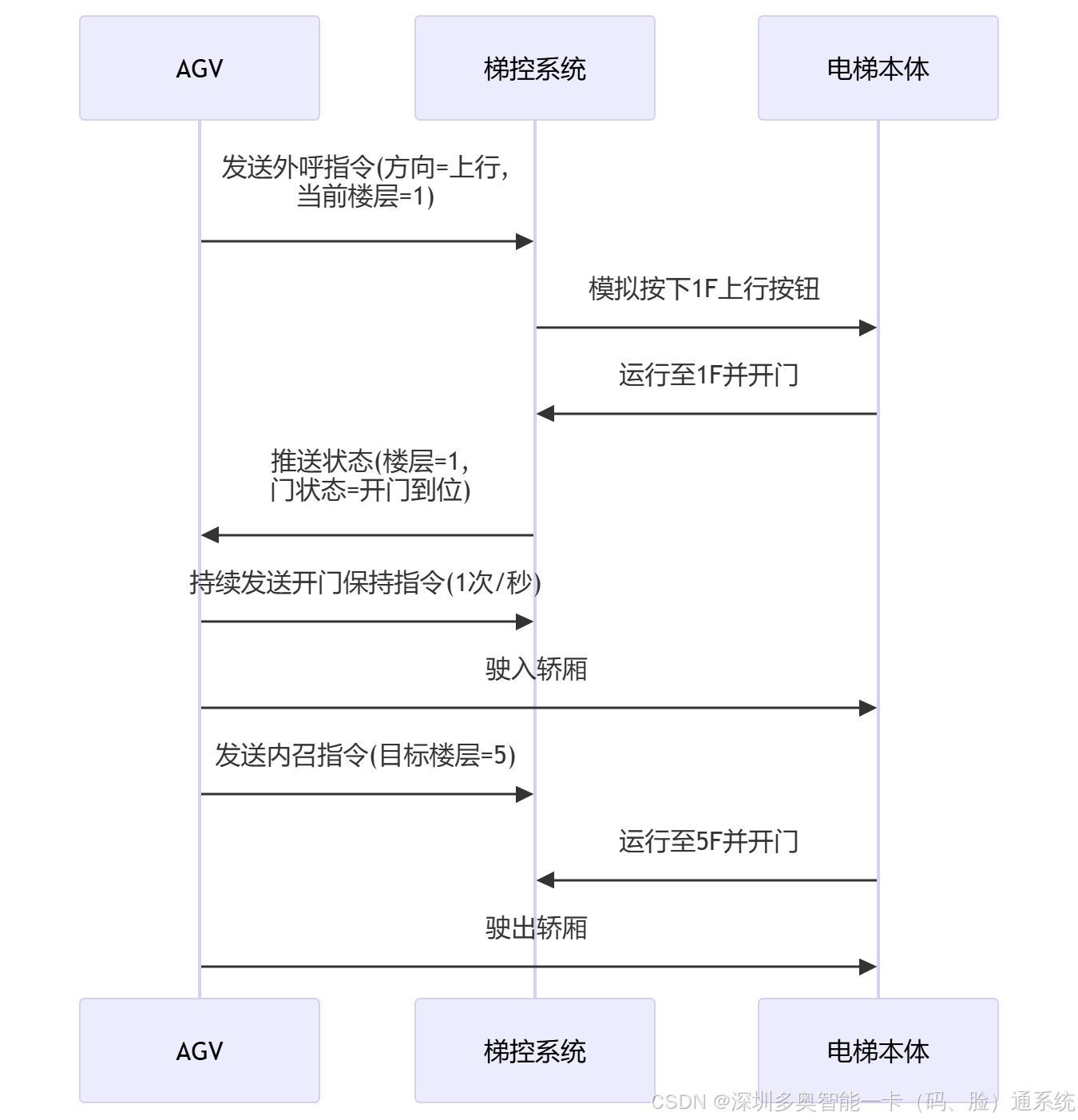
外呼阶段(电梯外部呼叫)
-
AGV通过激光雷达/视觉传感器定位电梯厅呼叫区域(引用1)
-
发送外呼信号(物理继电器或网络协议触发)
-
电梯响应开门,AGV通过红外/TOF传感器确认门开状态(引用5)
-
| 参数项 | 字节 | 说明(关键值) |
|---|---|---|
| 运行方向 | 1 | 2=上行,3=下行,1=停止 |
| 当前楼层 | 2 | 1-128(正常楼层),65535=-1层 |
| 前门状态 | 1 | 1=开门到位,3=关门到位 |
| 电梯速度 | 2 | 单位cm/s(150=1.5m/s) |
| 消防信号 | 1 | 1=有消防信号(紧急停止) |
-
内召阶段(电梯内部呼叫)
-
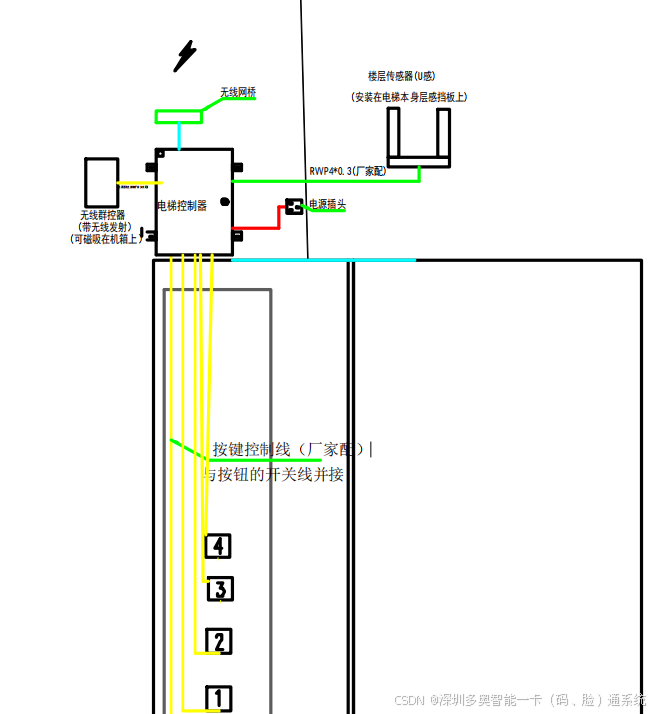
AGV进入轿厢后触发目标楼层按钮
-
通过CAN总线/RS485读取电梯实时状态(引用2字段):
-
当前楼层:确认停靠位置 -
运行方向:预判可达性 -
门状态:检测开门到位信号(值=1)
-
-
AGV离梯后发送释放电梯指令
-
flowchart TD
subgraph A机器人调度系统 RCS
A1任务规划
A2机器人控制
end
subgraph B智能梯控系统\
B1外呼联网控制器\
B2梯控主控制器\
B3状态检测器\
end
subgraph C电梯本体
C1电梯主控系统
C2轿厢/门机
end
A -- "外呼/内呼/查询状态"指令 --> B
B -- 模拟按键/获取状态 --> C
C -- 电梯实时状态反馈 --> B
B -- 电梯状态、门状态推送 --> A
A -- 移动与安全决策 --> DAGV/AMR/机器狗
B1 -. 无源干接点<br>(外呼按钮) .-> C1
B2 -. 无源干接点<br>(内呼按钮) .-> C1
B3 -. 传感器信号采集 .-> C
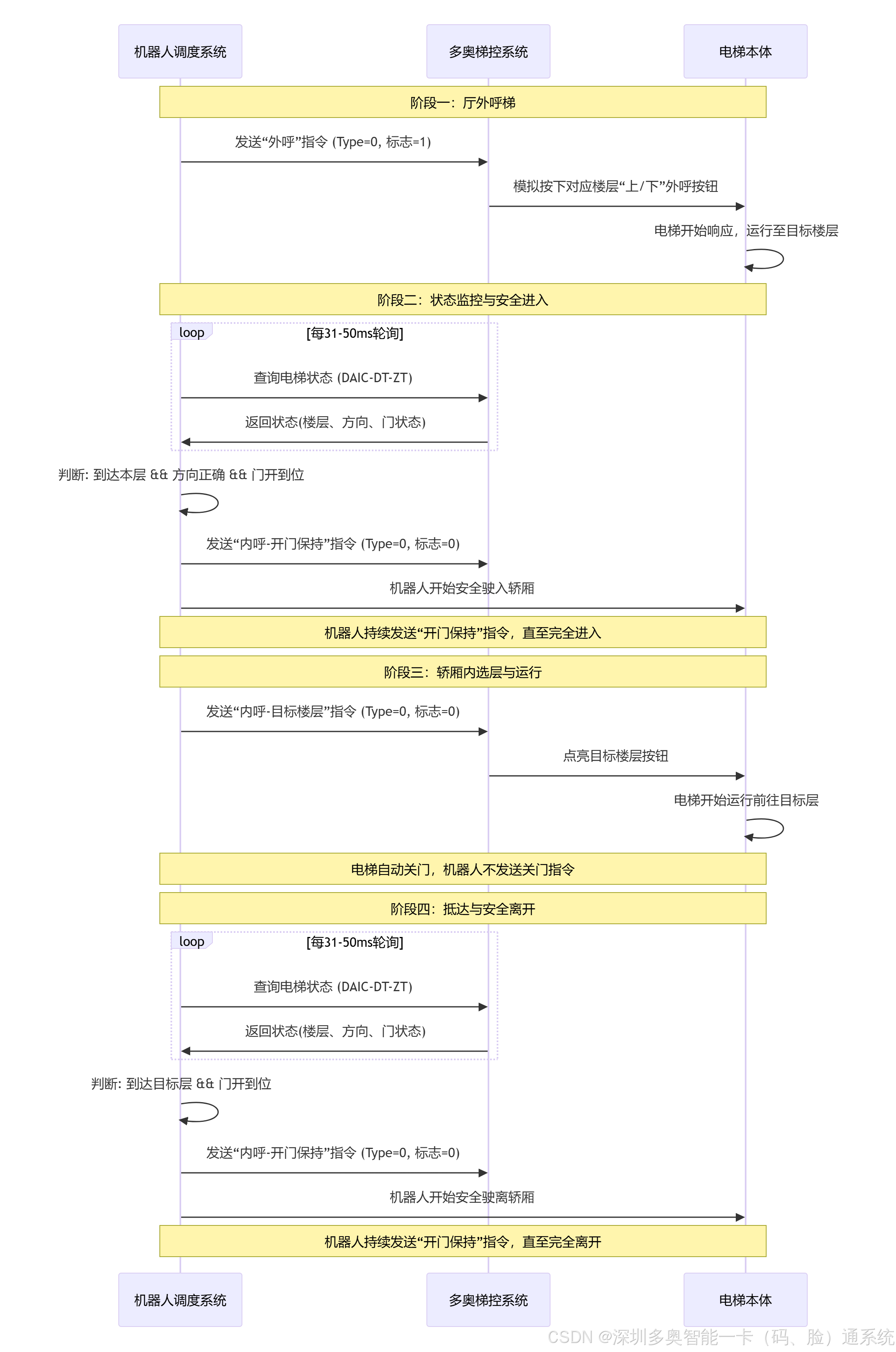
**乘梯全流程指令交互规范(基于MQTT协议)**
| 阶段 | 指令类型 | 指令标识 | 发送频率 | 功能说明 | 安全建议 |
|---|---|---|---|---|---|
| 1. 外呼召唤 | 外呼指令 | DAIC-DT-LW |
一次 | 向外呼控制器发送指令,点亮当前楼层上/下行按键 | 仅在机器人到达电梯厅指定区域后触发 |
| 2. 状态监测 | 状态查询 | DAIC-DT-ZT |
31~50ms | 实时获取:运行方向、当前楼层、前/后门状态 | 必须持续轮询,避免误判电梯停靠时机 |
| 3. 进入电梯 | 内呼开门 | DAIC-DT-MB |
1秒一次 | 持续发送,保持电梯门开启 | 若电梯具"防捣蛋"功能,需提前关闭该机制 |
| 4. 选层运行 | 内呼选层 | DAIC-TK-MB |
一次 | 门完全关闭后发送目标楼层指令 | 禁止发送关门指令,依赖电梯原生逻辑防夹 |
| 5. 到站监测 | 状态查询 | DAIC-TK-ZT |
31~50ms | 判断当前楼层是否为目标层、门是否开到位 | 需结合"运行方向"判断是否为反向停靠 |
| 6. 出电梯 | 内呼开门 | DAIC-DTMJ-MB |
1秒一次 | 持续发送,维持门开状态直至完全驶出 | 防止电梯因无人操作自动关门 |
注:
- 内呼标志 :
0(内召);外呼标志 :1(外召)- Type类型 :
0=专用模式(仅机器人可用),1=普通模式,2=强制接管(VIP)- 楼层编码 :
65535 = -1层,65534 = -2层,依此类推;0~128为正楼层(RFID/红外模式)- 门状态 :
1=开门到位,2=开关中,3=关门到位
**电梯状态数据结构(关键字段)**
| 字段 | 字节 | 数据含义 | 说明 |
|---|---|---|---|
| 运行方向 | 1 | 0=未知,1=停止,2=上行,3=下行 |
判断机器人是否可进入或驶出的关键依据 |
| 当前楼层 | 2 | 1~128:正楼层;65535~65533:负楼层;201=无效 |
RFID模式可自定义,需现场校准 |
| 前门状态 | 1 | 0=未知,1=开门到位,2=开关中,3=关门到位 |
机器人进入/驶出的唯一安全触发条件 |
| 后门状态 | 1 | 同上 | 多门电梯需同时监测 |
| 电梯速度 | 2 | 单位:厘米/秒(如 150 = 1.5m/s) |
用于判断电梯是否平稳停靠 |
| 工作模式 | 1 | 0=机器人专用,1=普通模式,2=强制接管 |
决定是否允许机器人发起外呼/内召 |
**外呼与内呼方案对比(工业部署视角)**
| 维度 | 纯内呼方案 | 纯外呼方案 | 外呼+内呼组合方案 |
|---|---|---|---|
| 技术实现 | 仅需内召指令 + 状态轮询 | 仅需外呼指令 | 外呼召唤 + 内召选层 |
| 设备成本 | 低(无需外呼模块) | 高(需外呼控制器+布线) | 高(需完整梯控系统) |
| 施工成本 | 低(仅对接控制柜) | 高(需改造电梯外呼面板) | 高(系统集成复杂) |
| 调度效率 | 低(被动等待) | 低(无法选层) | 高(精准召唤+目标控制) |
| 逻辑复杂度 | 高(需判断反向、重发) | 极高(任务中断风险) | 中(流程标准化) |
| 适用场景 | 夜间巡检、低频任务 | ❌ 不适用 | 智能工厂、医院、仓储物流 |
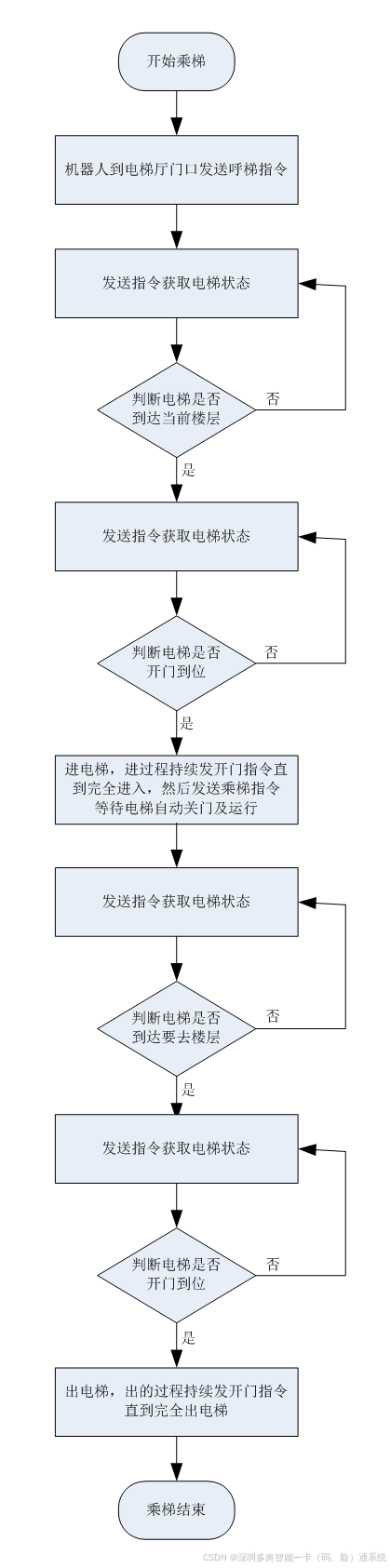
1.1 外呼 + 内呼 标准乘梯流程(推荐方案)
该方案通过外呼精准招梯 + 内呼控制选层,效率最高、逻辑最简洁,适用于高频次调度场景。
| 步骤 | 操作主体 | 核心动作 | 指令与参数 | 注意事项 |
|---|---|---|---|---|
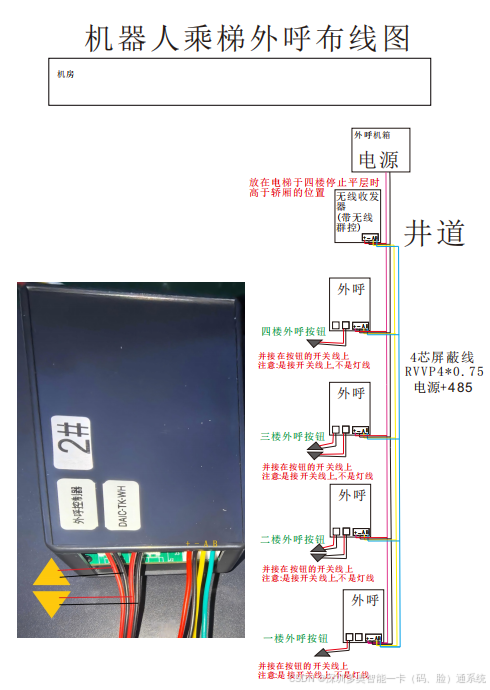
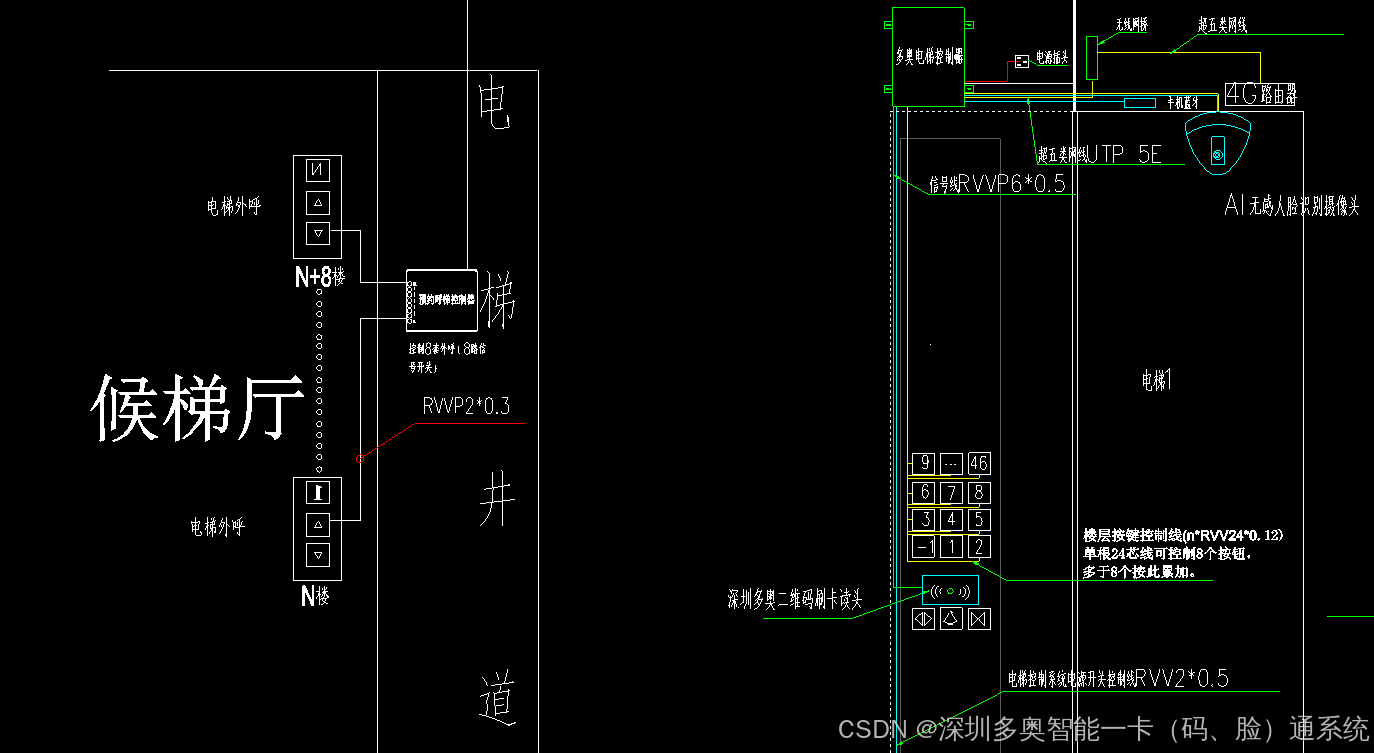
| 1 | 机器人 | 到达电梯口,发送外呼指令 | 指令:外呼联网控制器 (DAIC-DT-LW)参数:- 内呼 / 外呼标志:1(外呼)- 目标方向:上行 / 下行 | 梯控系统接收指令后,点亮当前楼层外呼按键 |
| 2 | 机器人 | 实时监测电梯状态 | 指令:读电梯运行状态 (DAIC-DT-ZT)频率:31~50ms / 次监测参数:运行方向、当前楼层、门状态 | 多奥梯控支持主动推送状态,无需机器人轮询 |
| 3 | 机器人 | 判定进梯条件 | 条件:运行方向匹配 + 停靠当前楼层 + 前门开门到位 | 满足条件后,机器人启动进梯动作 |
| 4 | 机器人 | 进梯过程保持开门 | 指令:内呼点亮开门按钮 (DAIC-DT-MB)频率:1 次 / 秒 | 若电梯带防捣蛋功能需取消;直至机器人完全进入轿厢 |
| 5 | 机器人 | 发送目标楼层内呼指令 | 指令:内呼点亮目标楼层按键 (DAIC-TK-MB)参数:- 内呼 / 外呼标志:0(内呼)- 目标楼层编码 | 发送后等待电梯自动关门,禁止发送关门指令(避免夹人风险) |
| 6 | 机器人 | 实时监测电梯运行状态 | 指令:读电梯运行状态 (DAIC-TK-ZT)频率:31~50ms / 次监测参数:当前楼层、门状态 | 持续监测直至到达目标楼层 |
| 7 | 机器人 | 判定出梯条件 | 条件:停靠目标楼层 + 前门开门到位 | 满足条件后,机器人启动出梯动作 |
| 8 | 机器人 | 出梯过程保持开门 | 指令:内呼点亮开门按钮 (DAIC-DTMJ-MB)频率:1 次 / 秒 | 直至机器人完全离开轿厢 |

1.2 纯内呼 乘梯流程(低成本方案)
该方案无需加装外呼控制器,依赖内呼指令招梯,成本低但逻辑复杂,适用于低频次调度场景。
| 步骤 | 操作主体 | 核心动作 | 指令与参数 | 特殊场景处理 |
|---|---|---|---|---|
| 1 | 机器人 | 到达电梯口,发送当前楼层内呼指令 | 指令:内呼点亮当前楼层按键 (DAIC-DT-MB)参数:内呼 / 外呼标志 = 0 | 梯控系统接收后点亮当前楼层内呼按键 |
| 2 | 机器人 | 监测电梯状态并判定进梯条件 | 指令:读电梯运行状态 (DAIC-DT-ZT)频率:1 次 / 秒监测参数:运行方向、当前楼层、门状态 | 场景 a :方向匹配→直接进梯场景 b :方向不匹配→等待电梯离开后,重新发送内呼指令场景 c:方向不匹配→进梯跟随,待电梯反向后重新发送目标楼层指令 |
| 3 | 机器人 | 进梯后发送目标楼层指令 | 同 1.1 方案步骤 5 | 若电梯到达顶层 / 底层后清除按键,需在电梯反向运行后重新发送内呼指令 |
| 4 | 机器人 | 判定出梯条件并完成出梯 | 同 1.1 方案步骤 6-8 | 出梯过程需持续发送开门指令 |
1.3 纯外呼 乘梯流程(简化方案)
该方案仅通过外呼指令招梯,内选层依赖电梯轿厢物理按键(或预设楼层),灵活性差,适用于固定路线往返场景(如 1 楼↔5 楼)。
- 核心动作:机器人发送外呼指令招梯→进梯后通过预设逻辑触发轿厢选层→到达目标楼层后出梯
- 局限性:无法灵活调整目标楼层,需电梯轿厢配合预设选层机制
二、外呼 vs 内呼方案对比
| 对比维度 | 纯外呼方案 | 纯内呼方案 | 混合方案建议 |
|---|---|---|---|
| 实现原理 | 物理接线模拟按钮 | 利用内呼信号模拟外呼 | 外呼+内召双控(引用3) |
| 成本 | 设备/施工成本高(引用2) | 成本降低30%-50% | 适中 |
| 精准度 | 高(直接控制电梯到达) | 中(依赖业务逻辑补偿) | 高 |
| 风险点 | 接线兼容性问题 | 电梯可能误关门(引用2) | 需双系统冗余 |
| 适用场景 | 医院/高端仓储(高安全需求) | 室内配送机器人(低成本场景) | 工业AMR(平衡成本与可靠性) |
关键结论:
内呼方案需规避 "电梯提前关门"风险 :通过轿厢内安装 微波活物传感器(引用5)延长开门时间
通力/迅达等品牌支持内呼模拟外呼,但需验证主板逻辑兼容性(引用2)
首要判断:是否要求可靠的运输效率和可预测的等待时间?
是 -> 选择【方案一:完整控制(外呼+内呼)】。
否 -> 判断:是否完全无法安装外呼硬件,且可接受极低效率和复杂逻辑?
是 -> 可考虑【方案二:经济适配(仅内呼)】,但需明确告知客户所有限制。
| 方案类型 | 设备成本 | 施工成本 | 调度效率 | 逻辑复杂度 | 适用场景 |
|---|---|---|---|---|---|
| 外呼 + 内呼 | 高(需加装外呼控制器) | 中(需布线对接外呼面板) | 高(精准招梯,无无效等待) | 低 | 高频次、多楼层、复杂路径调度 |
| 纯内呼 | 低(无需外呼设备) | 低(仅需对接内呼模块) | 中(存在无效等待,需判断电梯方向) | 高(需处理方向不匹配、按键清除等场景) | 低频次、少楼层、简单路径调度 |
| 纯外呼 | 中(需外呼控制器,无需内呼对接) | 中(需布线对接外呼面板) | 中(招梯精准,但选层不灵活) | 低 | 固定路线、往返式调度 |
选择何种方案,是项目成功的基础。
| 对比维度 | **方案一:完整控制(外呼+内呼)** | **方案二:经济适配(仅内呼)** | 核心结论 |
|---|---|---|---|
| 工作原理 | 主动召梯+主动选层。机器人可精准调度电梯至本层。 | 被动等梯+主动选层。机器人只能利用随机停靠的本层电梯。 | **方案一是生产系统的唯一推荐选择。** |
| 运力效率 | 极高。等待时间可控,可融入物流调度算法,大幅提升整体效率。 | 极低。等待时间随机且不可预测,在高峰期可能无限等待,成为系统瓶颈。 | 效率是自动化物流的生命线,必须选择方案一。 |
| 控制逻辑 | 清晰、标准化。流程固定,异常分支少,易于编程和调试。 | 极其复杂、易出错。需处理"方向错误"、"跟随搭乘"、"判断空闲"等众多边缘情况。 | 复杂的逻辑意味着更高的故障率和维护成本。 |
| 实施成本 | 较高。需安装厅外呼梯设备。 | 较低。仅需轿厢内设备。 | **不应以牺牲核心效率和可靠性为代价节省初期成本。** 方案一的长期ROI远高于方案二。 |
| 适用场景 | 所有需要可靠、高效、高频次跨楼层运输的生产、物流、服务场景。 | 仅适用于乘梯需求极少(<5次/天)、对时间不敏感、且绝对无法安装外呼的演示或极端受限场景。 | 方案二是一个"技术备用方案",而非"生产设计方案"。 |
纯内呼与纯外呼方案对比
| 方案类型 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| 纯内呼 | 成本低,施工简单 | 效率差,机器人需被动等待电梯随机停靠 | 低频次、低效率需求场景 |
| 纯外呼 | 效率高,呼梯精准 | 灵活性不足,适合固定路线场景 | 高频次、固定路线物流场景 |
| 外呼+内召 | 全流程精准控制,提升运行效率和安全性 | 设备成本和施工成本较高 | 高频次物流场景,推荐采用 |
三、模拟测试说明
-
单点测试(引用5)
-
使用多奥梯控厂家DEMO工具验证:
Python
# 模拟外呼信号测试 send_command("CALL_ELEVATOR", floor=1, direction="UP") assert get_door_status() == "OPEN" # 验证门状态响应 -
强制点亮楼层指示灯(检测电路连通性)
-
-
全流程压力测试
测试项 预期结果 故障注入示例 电梯响应超时 AGV启动10秒重呼机制 断开梯控网络连接 门异常关闭 触发红外急停信号 人工遮挡轿厢光幕 多机器人争用 云端调度分配优先级(引用4) 同时发送3个外呼请求 -
安全边界测试
-
消防信号触发时(字段值=1),AGV立即终止任务(引用2)
-
轿厢位置误差>20cm时,AGV启动位置修正算法
-
现将其转化为可执行、可检查的风险控制清单:
| 风险类别 | 风险点 | 后果 | 必须采取的措施(Who/When/How) |
|---|---|---|---|
| 电梯功能逻辑 | 1. 防捣蛋功能(连按取消)。 2. 开门超时强制关门。 | 指令被取消、机器人被夹。 | Who : 电梯供应商。 When : 合同签订前。 How : 要求提供书面说明 ,确认上述功能已禁用或提供规避方法。 |
| 通信可靠性 | RS-485等协议应答延迟、时序。 | 指令超时,流程中断。 | Who : 梯控供应商(多奥)。 When : 协议联调前。 How : 在通信协议中明确定义每条指令的超时时间、重试机制、应答格式。 |
| 系统供电 | 电梯节能休眠导致梯控断电。 | 系统"假死",机器人无法召梯。 | Who : 项目电工、电梯方。 When : 布线设计阶段。 How : 梯控系统电源必须独立 于电梯节能回路,建议从井道照明电或机房直接取电。 |
| 现场定义 | 前后门定义不清。 | 机器人等待的门与实际开门方向不符。 | Who : 现场工程师、项目组。 When : 设备安装前。 How : 在施工图上明确标记"前门"(通常为面向轿厢操作面板侧),并同步给所有参与方。 |
| 调试与验证 | 缺乏有效的独立验证手段。 | 问题在集成后期爆发,排查困难。 | Who : 梯控供应商(多奥)。 When : 梯控安装完成后。 How : 要求供应商使用调试工具(DEMO) 完成所有基础功能测试并提交报告,作为机器人联调的前提条件。 |
| 安全增强 | 人机混乘风险、状态不透明。 | 安全事故、故障难排查。 | Who : 安全负责人、项目规划。 When : 方案设计阶段。 How : 人机混用场景,强烈建议选配 轿厢内活体/货物检测传感器 。关键位置安装三色状态灯。 |

3.1 指令数据格式(通用)
| 字段 | 字节长度 | 取值说明 | 备注 |
|---|---|---|---|
| 内呼 / 外呼标志 | 1 | 0 = 内呼;1 = 外呼 | 区分指令类型 |
| Type 类型 | 1 | 0 = 专用模式(仅机器人 / 刷卡可用)1 = 普通模式(无限制使用)2=VIP 模式(禁止其他操作) | 梯控工作模式切换 |
3.2 电梯状态数据格式(5 字节基础信息)
| 字段 | 字节长度 | 取值说明 | 备注 |
|---|---|---|---|
| 运行方向 | 1 | 0 = 未知;1 = 停止;2 = 上行;3 = 下行 | 核心判定参数 |
| 当前楼层 | 2 | U 感模式:1~128(楼层);65535=-1 层...RFID 模式:0~127(端口,需现场映射) | 支持正负楼层 |
| 后门状态 | 1 | 0 = 未知;1 = 开门到位;2 = 开关门中;3 = 关门到位 | 适用于贯通门电梯 |
| 前门状态 | 1 | 同上 | 主流电梯单门场景使用 |
3.3 扩展状态数据(可选)
| 字段 | 字节长度 | 取值说明 |
|---|---|---|
| 电梯速度 | 2 | 单位:厘米 / 秒(如 150=1.5 米 / 秒) |
| 上次运行方向 | 1 | 同基础状态运行方向取值 |
| 当前工作模式 | 1 | 同 Type 类型取值 |
| 消防信号 | 1 | 0 = 无;1 = 有(消防状态下禁止调度) |
四、关键注意事项
4.1 话题定义
| 设备 / 平台 | 主题类型 | 话题名称 | 数据方向 | 说明 |
|---|---|---|---|---|
| 机器人 | 发布主题 | BQ/Mwr/ID_Sx | 机器人→梯控 | 机器人发送呼梯、选层、状态查询指令 |
| 机器人 | 订阅主题 | BQ/Mrd/ID_Sx | 梯控→机器人 | 机器人接收电梯状态、指令响应数据 |
| 梯控设备 | 发布主题 | BQ/Mrd/ID_Sx | 梯控→机器人 | 梯控主动推送状态或响应指令 |
| 梯控设备 | 订阅主题 | BQ/Mwr/ID_Sx | 机器人→梯控 | 梯控接收机器人指令 |
注:
ID_Sx为设备唯一标识,需现场配置
4.2 其他通信协议选型建议
| 协议 | 所属层级 | 核心特点 | 适用场景 |
|---|---|---|---|
| TCP/HTTP/HTTPS | 传输层 / 应用层 | 可靠传输 / 加密传输 | 远距离、跨网段调度 |
| Modbus RTU/TCP | 应用层 | 工业标准、抗干扰 | 工厂内网、多设备组网 |
| CAN | 数据链路层 | 实时性高、多主仲裁 | 机器人本体与梯控近距离对接 |
| RS-485 | 物理层 | 差分信号、多点通信 | 承载 Modbus RTU,工业现场布线 |
| LoRa | 物理层 / 网络层 | 远距离、低功耗 | 户外园区、无布线场景 |
其他
-
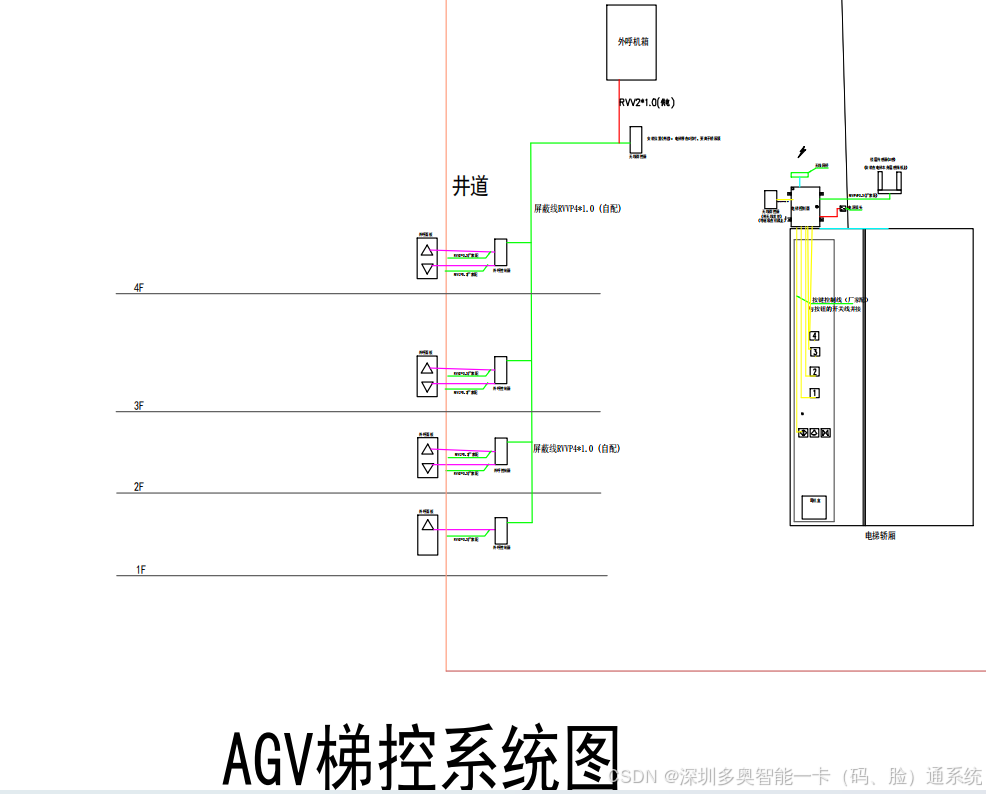
电气兼容性
-
避免直接并联机器人电源与梯控电路,需加装 光电隔离模块 防干扰
-
继电器触点容量需匹配电梯按钮电压(通常24VDC/220VAC)
-
-
动态避障优化
-
在电梯厅安装 三色指示灯(引用5):
-
红色:机器人占用中
-
绿色:电梯可用
-
黄色:故障状态
-
-
-
通信冗余设计
| 协议类型 | 层级 | 特点与应用场景 |
|---|---|---|
| MQTT | 应用层 | 轻量级发布订阅模式,适合无线场景 |
| Modbus TCP | 应用层 | 工业以太网标准,支持多设备联网 |
| Modbus RTU | 应用层 | 串行通信,适用于短距离布线 |
| RS-485 | 物理层 | 差分信号抗干扰,支持多点通信 |
最佳实践 :对于无外呼按钮的老旧电梯,推荐 "无线梯控模块+物理继电器" 混合方案,成本增幅约15%但可靠性提升40%(引用2&5实测数据)。
实施检查清单
在项目开始前,请与三方共同确认以下事项:
| 类别 | 检查项 | 负责方 | 状态 |
|---|---|---|---|
| 电梯侧 | 1. 防捣蛋功能已取消。 | 电梯维保 | □ |
| 2. 开门超时强制关门时间已调整(延长或取消)。 | 电梯维保 | □ | |
| 3. 节能/休眠模式已了解,且不影响梯控供电。 | 电梯维保/梯控 | □ | |
| 4. 贯通门/双开门使用规则已明确(默认前门)。 | 所有方 | □ | |
| 通信侧 | 5. 通信协议(MQTT/Modbus等)及参数已确认。 | 机器人/梯控 | □ |
| 6. 网络布线(或RS-485布线)已完成且稳定。 | 施工方 | □ | |
| 7. MQTT主题、数据格式已联调通过。 | 机器人/梯控 | □ | |
| 流程侧 | 8. 外呼控制器安装位置合理,信号覆盖良好。 | 梯控/施工方 | □ |
| 9. 机器人发送指令的逻辑(频率、条件)已编程实现。 | 机器人供应商 | □ | |
| 10. 机器人处理"搭错车"等异常情况的逻辑已完备。 | 机器人供应商 | □ | |
| 安全侧 | 11. 梯控系统电源为独立取电(建议)。 | 梯控/施工方 | □ |
| 12. 机器人不主动发送"关门指令"的逻辑已确认。 | 机器人供应商 | □ | |
| 13. 现场已规划安全区域,有必要的声光提示。 | 所有方 | □ |