什么是分水岭算法?
分水岭算法(Watershed Algorithm)是一种经典的基于数学形态学的图像分割方法 ,常用于解决相互接触或重叠目标的分割问题,在医学图像、显微镜图像、工业检测等领域应用广泛。
"分水岭"这一名称来源于地理学中的概念:
将灰度图像看作一幅地形图(Topographic Surface):
- 像素灰度值 → 地形高度
- 灰度低的区域 → 山谷(盆地)
- 灰度高的区域 → 山峰(分水岭)
通过模拟从低洼处"注水"的过程,当不同盆地的水即将汇合时,建立"堤坝",这些堤坝即构成分割边界。
分水岭算法的基本思想
1. 地形模型
给定一幅灰度图像 I(x,y),将其视为一个三维地形:
- (x,y):空间位置
- I(x,y):高度值
算法从局部最小值(Local Minima)开始注水,每一个最小值对应一个初始区域。
2. 注水与合并过程
分水岭的核心过程可以描述为:
- 从所有局部极小值开始"注水"
- 水位逐渐升高
- 相邻区域的水即将接触时,构建分水岭边界
- 最终形成多个互不连通的区域
如果不加限制,分水岭算法会产生大量细碎区域(过分割),这是其最大缺点。
数学与形态学基础
1. 极小值与集水盆(Catchment Basin)
- 集水盆:所有最终流向同一极小值的像素集合
- 分水岭线:不同集水盆之间的边界像素集合
形式化定义中,分割结果可以表示为:
2. 梯度图的重要性
在实际应用中,分水岭通常不直接作用于原始图像 ,而是作用于梯度图像:
原因是:
- 区域内部梯度小
- 区域边界梯度大
- 更容易在边界处形成分水岭
OpenCV 中常用 Sobel 或 Laplacian 计算梯度。
过分割问题与标记控制分水岭
1. 过分割现象
由于噪声、纹理和微小灰度变化,分水岭会产生大量局部极小值,导致:
- 目标被切割成许多小块
- 分割结果难以使用
2. 标记控制分水岭(Marker-based Watershed)
为解决过分割问题,OpenCV 实际使用的是标记控制分水岭算法,核心思想是:
人为指定"可靠的前景"和"可靠的背景",限制分水岭的生长范围
标记图(Markers)中:
- 不同整数 → 不同区域
0→ 未知区域-1→ 分水岭边界(OpenCV 输出)
示例
分水岭算法整体流程:
- 读取图像
- 灰度化
- 二值化(阈值或 Otsu)
- 形态学去噪
- 距离变换(Distance Transform)
- 确定前景 markers
- 确定背景 markers
- 构造 marker 图
- 调用
cv2.watershed() - 可视化分割结果
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
def watershed_demo(image_path):
# 1. 读取图像
img = cv2.imread(image_path)
if img is None:
raise ValueError("图像读取失败,请检查路径")
img_show = img.copy()
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 2. 灰度化
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 3. 二值化(Otsu + 反色)
ret, binary = cv2.threshold(
gray, 0, 255,
cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU
)
# 4. 形态学开运算(去噪)
kernel = np.ones((3, 3), np.uint8)
opening = cv2.morphologyEx(
binary, cv2.MORPH_OPEN, kernel, iterations=2
)
# 5. 膨胀,确定"确定背景"
sure_bg = cv2.dilate(opening, kernel, iterations=3)
# 6. 距离变换,确定"确定前景"
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2, 5)
ret, sure_fg = cv2.threshold(
dist_transform,
0.7 * dist_transform.max(),
255,
0
)
sure_fg = np.uint8(sure_fg)
# 7. 未知区域
unknown = cv2.subtract(sure_bg, sure_fg)
# 8. 连通域标记
ret, markers = cv2.connectedComponents(sure_fg)
# markers + 1,保证背景不是 0
markers = markers + 1
# 未知区域标记为 0
markers[unknown == 255] = 0
# 9. 分水岭算法
markers = cv2.watershed(img, markers)
# 10. 可视化分水岭边界(-1)
img_show[markers == -1] = [0, 0, 255] # 红色边界
# 11. 显示结果
titles = [
"Original",
"Binary",
"Opening",
"Sure Background",
"Sure Foreground",
"Watershed Result"
]
images = [
img_rgb,
binary,
opening,
sure_bg,
sure_fg,
cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
]
plt.figure(figsize=(12, 8))
for i in range(len(images)):
plt.subplot(2, 3, i + 1)
plt.imshow(images[i], cmap='gray')
plt.title(titles[i])
plt.axis('off')
plt.tight_layout()
plt.show()
if __name__ == "__main__":
# 示例图片路径(如 coins.png、cells.png)
watershed_demo("coins.png")执行结果:
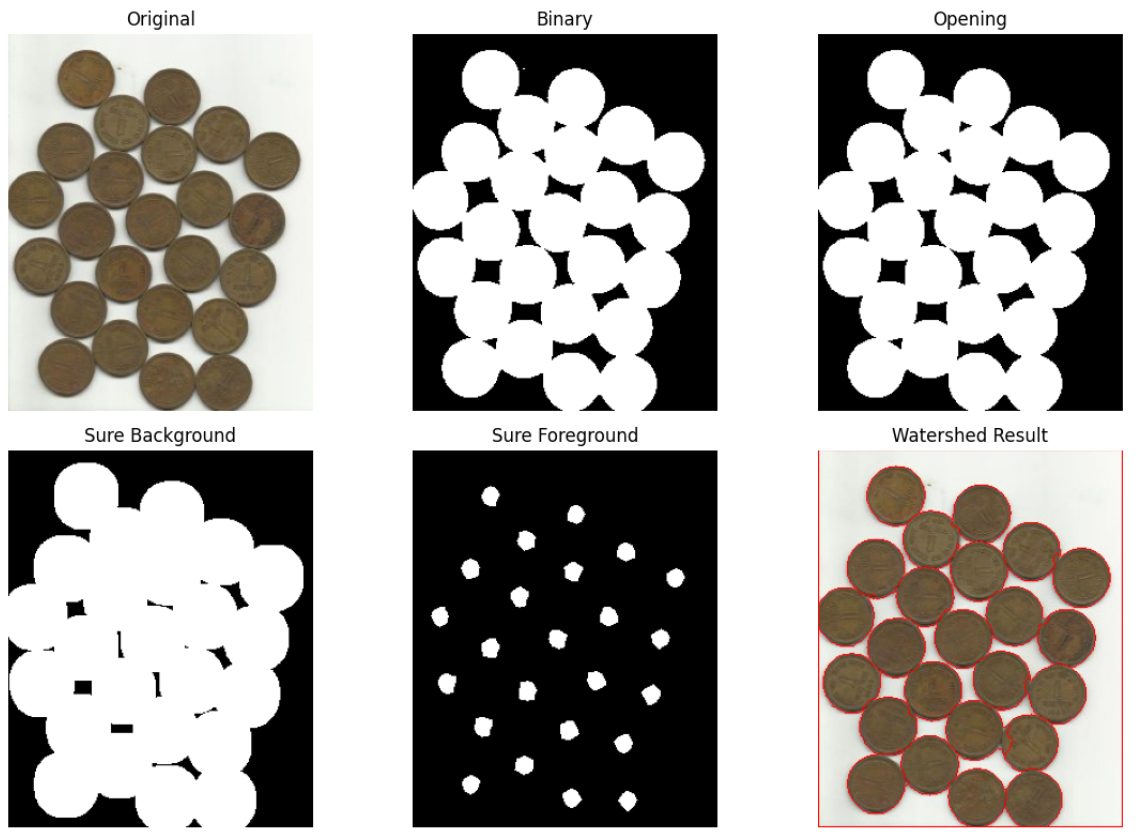
总结
OpenCV 分水岭算法本质上是一种:
基于拓扑地形和数学形态学的区域分割方法
通过引入标记控制机制 ,分水岭从理论方法转变为工程可用算法。
在实际项目中,它常与阈值分割、距离变换、形态学处理联合使用,是解决粘连目标分割问题的经典方案。