本文面向蓝牙定位开发工程师、定位技术研究者、商场智慧化开发工程师 / 室内导航项目开发者,从核心技术架构讲到功能设计,提供可落地的商场室内导航系统开发方案(基于蓝牙 iBeacon 技术),助您高效搭建 "停车 - 逛店 - 返程" 全流程导航系统。
如需获取商场室内导航系统技术解决方案可前往文章最下方获取,如有项目合作及技术交流欢迎私信作者。
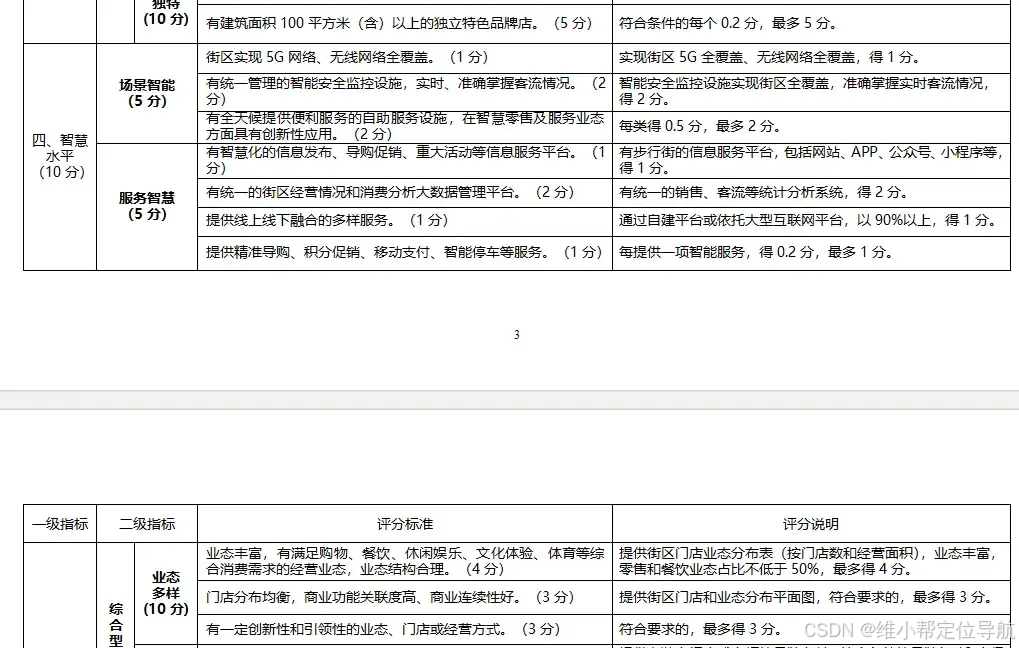
本文结合北京市商务局 2025 年智慧商圈补贴政策(单项目最高 100 万元补助),详解商场室内导航系统的技术架构、功能实现与落地案例。重点补充 iBeacon 室内定位 和 多楼层路径规划 核心代码,为开发者提供可直接复用的工程方案,同时解析系统如何破解传统商场找店难、停车繁、数字化弱三大痛点,实现政策申报与运营升级的双重价值。

一、行业痛点与政策机遇
1.1 传统商场三大技术痛点
- 定位精度瓶颈:大型商场(单层>2 万㎡)GPS 信号衰减超 90%,信号穿透力不足,导致用户寻路耗时 10-15 分钟,30% 消费决策流失
- 全流程断裂:停车系统与商场导航孤立,反向寻车依赖人工记忆,缴费流程繁琐(平均耗时 8 分钟)
- 数据闭环缺失:缺乏客流动线数字化采集能力,无法支撑智慧运营,不符合 "智慧商圈" 申报核心指标
1.2 政策补贴核心要求
北京市商务局《2025 年支持商场品质提升项目通知》明确:
- 支持方向:数字化升级(室内导航、智能停车等)
- 补助标准:单个项目最高 100 万元
- 验收关键:需提供定位精度报告、用户体验优化数据、运营数据闭环证明
二、核心技术原理与工程实现
2.1 室内外一体化定位技术
技术架构
|--------------------------------------------------|
| 室外GPS(定位精度5-10米)→ 商场入口蓝牙触发 → iBeacon三角定位(精度1-3米) |
关键技术细节
- iBeacon 设备:采用 BLE 4.0 协议,广播包含 UUID(厂商标识)+ Major(区域 ID)+ Minor(设备 ID)+ TX Power(参考信号强度)
- 部署方案:3M 胶粘贴,无需电路改造,密度建议每 50㎡1 台(复杂区域加密)
- 定位算法:基于 RSSI(接收信号强度)的加权三角定位,公式如下:
|-------------------------------------------|
| 距离d = 10^((TX_Power - RSSI) / (10 * n)) |
其中 n 为环境衰减系数(商场环境取 2.0-2.5)
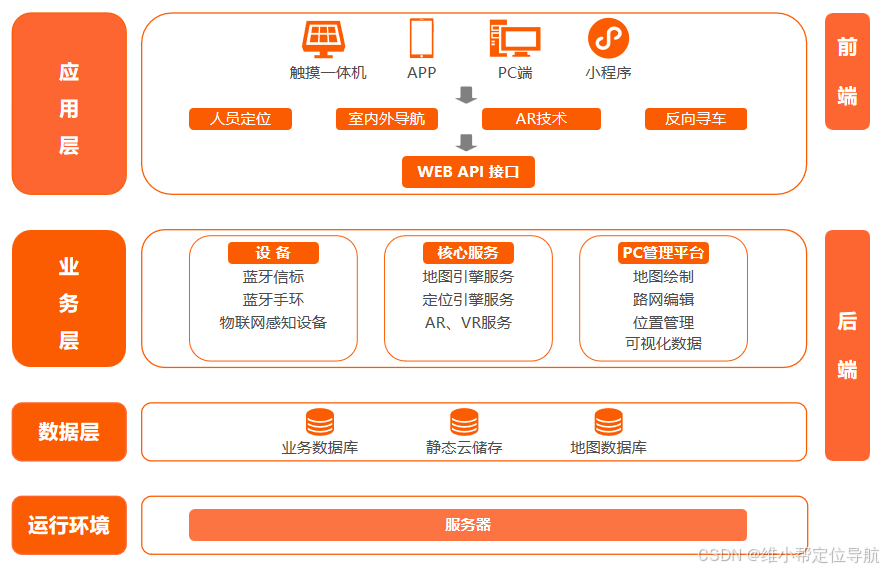
2.2 AR 导航与停车系统对接
- AR 技术栈:Unity + Vuforia(锚点识别)+ 数字人 SDK(语音交互)
- 停车系统联动:车位传感器(NBIoT 协议)→ 导航系统 API → 反向寻车路径规划
- 数据流转:车牌识别结果 → 车位数据库查询 → 路径引擎计算 → AR 导航渲染
三、关键功能模块技术解析
3.1 室内地图引擎选型
|---------------|---------------|----------------|-------|
| 引擎类型 | 适用场景 | 技术优势 | 代码复杂度 |
| Leaflet(2D) | 中小型商场、轻量化需求 | 轻量(100KB)、插件丰富 | 低 |
| Mapbox GL(3D) | 大型商场、3D 可视化需求 | 支持楼层切换、动态渲染 | 中 |
| Three.js(定制) | 高端商场、AR 互动需求 | 完全自定义、性能可控 | 高 |
3.2 核心功能实现要点
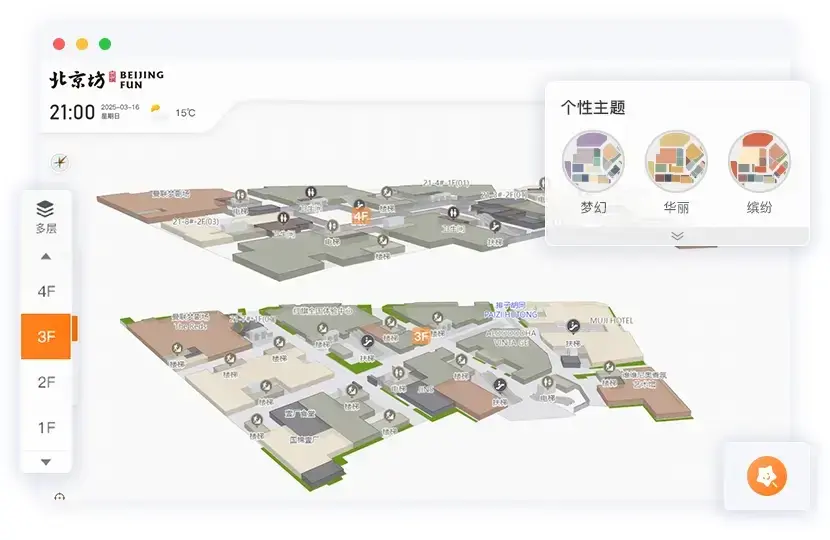
1.室内地图:
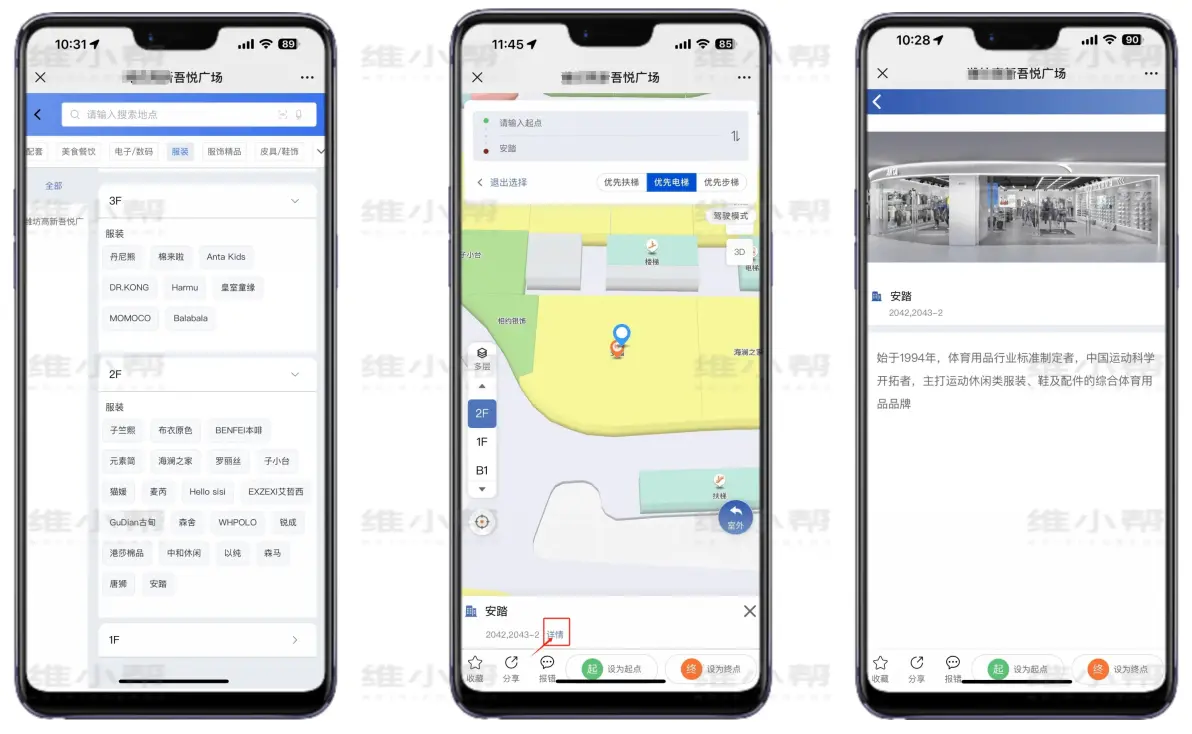
1:1 还原商场空间结构,支持 2D/3D 视角切换与楼层快速跳转,直观标注店铺、电梯、卫生间等关键节点,配备分类检索功能。
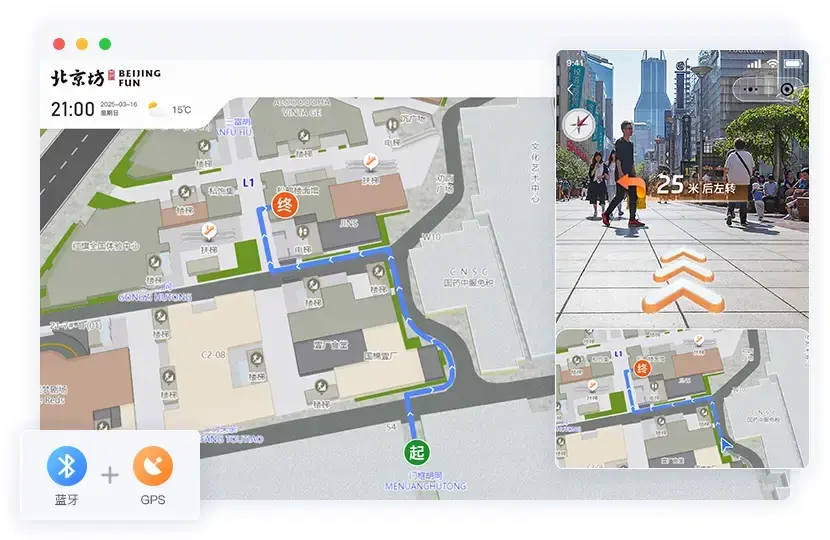
2.店铺实时导航:
输入目标店铺自动规划最优路径,通过动态路线渲染与语音提示引导,跨楼层时自动推荐垂直交通设施,定位误差低于 1 米。
3.店铺图文介绍:
整合店铺资质、特色商品、实时促销等信息,点击图标即可查看,支持位置一键分享给同行人员。
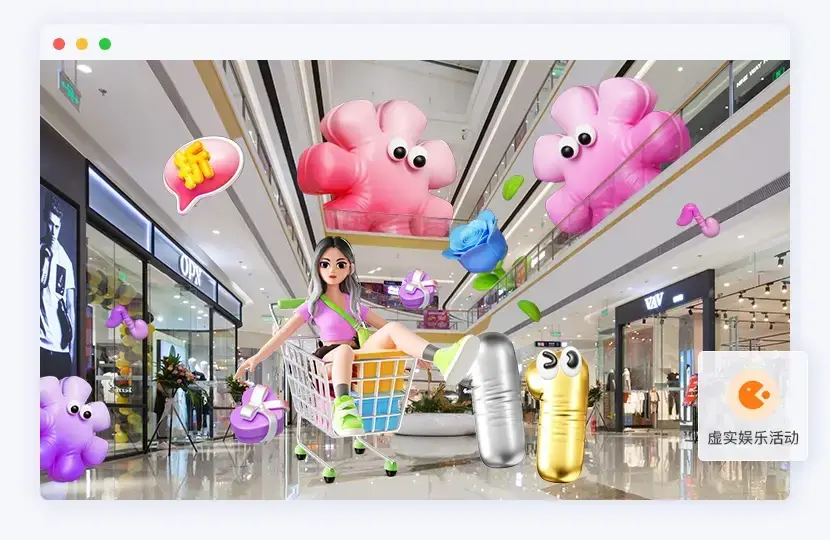
4.商场AR寻宝:
在导航路径中设置虚拟宝藏点位,用户完成互动即可领取商户优惠券,提升停留时长与消费转化。
5.触摸大屏导览:
部署于入口及中庭,支持 AI 语义交互,可直接语音查询 "带儿童厕所的餐厅" 等需求,同步展示导航路线与活动信息。

四、核心代码示例(2 个关键模块)
示例 1:Android 端 iBeacon 定位实现(Kotlin)
|---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| import android.bluetooth.BluetoothAdapter import android.bluetooth.le.BluetoothLeScanner import android.bluetooth.le.ScanCallback import android.bluetooth.le.ScanResult import kotlin.math.pow class IBeaconManager { private val bluetoothAdapter: BluetoothAdapter? = BluetoothAdapter.getDefaultAdapter() private val scanner: BluetoothLeScanner? = bluetoothAdapter?.bluetoothLeScanner // 目标iBeacon的UUID(需与部署设备一致) private val TARGET_UUID = "xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx" // 开始扫描iBeacon信号 fun startScan() { if (scanner == null) return scanner.startScan(scanCallback) } // 扫描回调处理 private val scanCallback = object : ScanCallback() { override fun onScanResult(callbackType: Int, result: ScanResult) { super.onScanResult(callbackType, result) val scanRecord = result.scanRecord ?: return val bytes = scanRecord.bytes // 解析iBeacon数据帧(符合Apple iBeacon标准) if (bytes.size >= 55 && bytes5 == 0x02.toByte() && bytes6 == 0x15.toByte()) { val uuid = parseUUID(bytes, 9) if (uuid == TARGET_UUID) { val major = (bytes25.toInt() and 0xFF shl 8) or (bytes26.toInt() and 0xFF) val minor = (bytes27.toInt() and 0xFF shl 8) or (bytes28.toInt() and 0xFF) val txPower = bytes29.toInt() val rssi = result.rssi // 计算距离(环境衰减系数n=2.2) val distance = 10.0.pow((txPower - rssi) / (10.0 * 2.2)) // 回调定位结果(精度过滤:仅保留1-3米内有效数据) if (distance in 1.0..3.0) { onBeaconLocated(uuid, major, minor, distance) } } } } } // 解析UUID字段 private fun parseUUID(bytes: ByteArray, startIndex: Int): String { val uuidBuilder = StringBuilder() for (i in 0..15) { uuidBuilder.append(String.format("%02x", bytesstartIndex + i)) when (i) { 3, 5, 7, 9 -> uuidBuilder.append("-") } } return uuidBuilder.toString() } // 定位结果回调(需实现接口) private fun onBeaconLocated(uuid: String, major: Int, minor: Int, distance: Double) { // 此处可添加三角定位计算逻辑,整合多个iBeacon信号 } // 停止扫描 fun stopScan() { scanner?.stopScan(scanCallback) } } |
代码说明:
- 遵循 Apple iBeacon 数据帧格式(前导字节 0x02+0x15)
- 包含信号强度(RSSI)到距离的转换计算
- 加入精度过滤逻辑,确保定位稳定性
- 可扩展为多 iBeacon 三角定位(需新增坐标计算逻辑)
示例 2:多楼层路径规划(Dijkstra 算法)
|----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| import java.util.*; // 节点类(表示商场内关键点:店铺、电梯、楼梯等) class Node { String id; // 节点ID(如"F1-001"表示1楼001号节点) int floor; // 楼层(地下1层为-1,地上1层为1) double x; // 平面X坐标(米) double y; // 平面Y坐标(米) List; // 关联边(相邻节点) public Node(String id, int floor, double x, double y) { this.id = id; this.floor = floor; this.x = x; this.y = y; this.edges = new ArrayList } } // 边类(表示节点间通路) class Edge { Node target; // 目标节点 double weight; // 权重(距离/通行时间) public Edge(Node target, double weight) { this.target = target; this.weight = weight; } } public class MallPathPlanner { // Dijkstra算法实现多楼层路径规划 public ListPath(Node start, Node end) { // 距离缓存:key=节点ID,value=起点到该节点的最短距离 Map dist = new HashMap // 前驱节点缓存:用于回溯路径 Map prev = new HashMap // 优先级队列(小顶堆):按距离排序 PriorityQueue = new PriorityQueue.comparingDouble(n -> dist.getOrDefault(n.id, Double.MAX_VALUE))); // 初始化 dist.put(start.id, 0.0); pq.add(start); while (!pq.isEmpty()) { Node current = pq.poll(); // 到达终点,提前退出 if (current.id.equals(end.id)) break; // 遍历相邻节点 for (Edge edge : current.edges) { Node neighbor = edge.target; // 计算当前路径距离 double newDist = dist.get(current.id) + edge.weight; // 若找到更短路径,更新并加入队列 if (newDist < dist.getOrDefault(neighbor.id, Double.MAX_VALUE)) { dist.put(neighbor.id, newDist); prev.put(neighbor.id, current); pq.add(neighbor); } } } // 回溯生成路径 List> path = new ArrayList(); Node current = end; while (current != null) { path.add(current); current = prev.get(current.id); } // 反转路径(从起点到终点) Collections.reverse(path); return path; } // 构建测试用图(简化版商场结构) public static void main(String\[\] args) { MallPathPlanner planner = new MallPathPlanner(); // 1楼节点 Node f1Entrance = new Node("F1-001", 1, 0, 0); // 1楼入口 Node f1Elevator = new Node("F1-002", 1, 50, 30); // 1楼电梯 Node f1Store = new Node("F1-003", 1, 80, 60); // 1楼目标店铺 // 2楼节点 Node f2Elevator = new Node("F2-001", 2, 50, 30); // 2楼电梯 Node f2Store = new Node("F2-002", 2, 70, 40); // 2楼目标店铺 // 关联边(距离作为权重) f1Entrance.edges.add(new Edge(f1Elevator, 58.3)); // 入口到电梯:√(50²+30²)≈58.3米 f1Elevator.edges.add(new Edge(f1Store, 36.1)); // 电梯到1楼店铺:√(30²+20²)≈36.1米 f1Elevator.edges.add(new Edge(f2Elevator, 5.0)); // 电梯跨楼层:权重5(模拟通行时间) f2Elevator.edges.add(new Edge(f2Store, 22.4)); // 电梯到2楼店铺:√(20²+10²)≈22.4米 // 规划路径:1楼入口 → 2楼店铺 List> path = planner.planPath(f1Entrance, f2Store); // 输出路径 System.out.println("规划路径:"); for (Node node : path) { System.out.printf("楼层:%d,坐标:(%.1f, %.1f) → ", node.floor, node.x, node.y); } System.out.println("到达终点"); } } |
代码说明:
- 抽象商场节点为图结构,支持楼层维度(通过电梯节点关联)
- 采用 Dijkstra 算法求最短路径,权重可灵活配置(距离 / 时间)
- 支持跨楼层导航,自动处理垂直交通设施(电梯 / 扶梯)
- 可扩展加入避障逻辑(如施工区域节点权重设为无穷大)
五、落地案例技术拆解
5.1 深圳 KK ONE 购物中心
- 技术选型:微信小程序 + Mapbox GL(3D 地图)+ 阿里云 IoT(iBeacon 管理)
- 核心亮点:
- AR 数字人导航:基于 Three.js 实现 3D 模型渲染,语音交互采用腾讯云 TTS
- 停车 - 地铁衔接:对接地铁 API 获取实时到站信息,导航路径自动加入步行时间计算
- 量化成果:问询台咨询量下降 40%(技术原因:90% 寻路需求通过小程序解决)

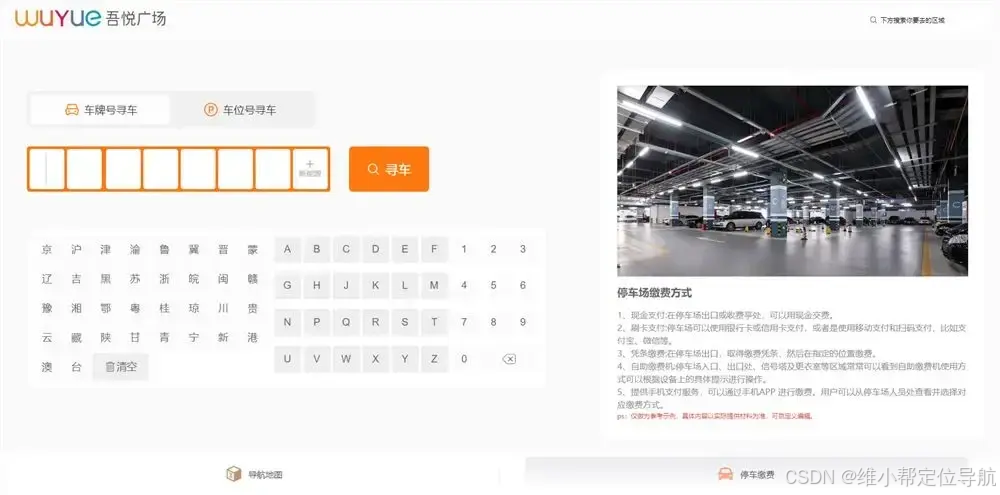
5.2 潍坊吾悦广场
- 技术选型:维小帮 3D 引擎 + 抗碾压 iBeacon(IP68 防护)+ 车牌识别 SDK
- 核心亮点:
- 反向寻车:车牌号→车位号映射采用 Redis 缓存,查询响应时间<100ms
- 停车券兑换:导航系统与支付系统对接,消费满额自动触发券发放
- 量化成果:停车满意度 92%(技术原因:寻车耗时从 15 分钟降至 3 分钟内)
六、应用效益与技术价值
6.1 量化效益
|------|---------------|------------------------|
| 维度 | 提升数据 | 技术支撑 |
| 体验优化 | 寻路时间缩短 60% | iBeacon 高精度定位 + 路径规划算法 |
| 运营提效 | 人力成本降低 60% | AI 语义交互(触摸大屏)+ 自助导航 |
| 经济增值 | 销售额增长 12%-20% | AR 互动(停留时长提升 40%) |
| 政策申报 | 100 万元补贴适配 | 数字化数据闭环(定位 / 客流 / 转化) |
6.2 技术可复用性
- 跨场景迁移:可直接应用于机场、医院、会展中心等室内场景
- 二次开发:提供 RESTful API 接口,支持商户信息对接、促销活动配置
- 成本可控:iBeacon 设备单价<50 元,部署成本比传统 WiFi 定位低 30%
七、总结与展望
商场室内导航系统的核心价值在于政策适配 + 技术落地 + 运营闭环:通过 iBeacon 定位解决室内精度问题,通过图算法实现全流程导航,通过数据采集满足政策申报要求。未来可结合 AI 大模型优化路径规划(如根据实时客流动态调整路线),并接入更多 IoT 设备(如智能闸机、充电桩),构建全场景智慧商业生态。
如需获取完整项目源码、iBeacon 部署方案或政策申报材料模板,可点击文章最下方↓