什么是图像分割?
图像分割(Image Segmentation)是计算机视觉中的基础问题,其目标是将一幅图像划分为若干具有语义一致性或视觉一致性 的区域,使同一区域内像素在灰度、颜色、纹理或空间特征上具有较强相似性,而不同区域之间存在明显差异。
在 OpenCV 中,图像分割通常作为目标检测、目标识别、视频分析、医学图像处理、工业视觉等任务的前置步骤。
从本质上看,图像分割是一个像素级分类问题:为图像中每一个像素分配一个类别标签。由于真实场景复杂、光照变化大、噪声干扰多,分割往往是一个不适定问题,因此 OpenCV 提供了多种基于不同假设的分割方法。
基于阈值的图像分割
1. 全局阈值分割
阈值分割是最简单、最常用的分割方法,其核心思想是:
根据像素灰度值是否大于某一阈值,将图像划分为前景和背景。
数学表达式为:
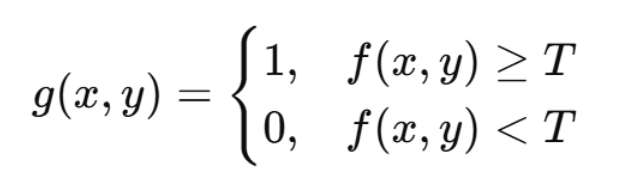
在 OpenCV 中通过 cv::threshold() 实现,常见类型包括:
THRESH_BINARYTHRESH_BINARY_INVTHRESH_TRUNCTHRESH_TOZERO
该方法计算简单、速度快,但对光照变化敏感,不适用于背景复杂或灰度分布重叠的场景。
2. Otsu 自适应阈值(大津法)
Otsu 算法是一种经典的全局自适应阈值选择方法 ,其基本思想是:
选择一个阈值,使前景与背景的类间方差最大。
OpenCV 中通过:
cpp
threshold(src, dst, 0, 255, THRESH_BINARY | THRESH_OTSU);Otsu 方法适用于直方图呈双峰分布的图像,在文档扫描、简单工业检测中效果良好,但仍然是全局阈值方法,对局部变化不敏感。
3. 自适应阈值分割
为解决光照不均问题,自适应阈值根据局部邻域计算阈值:
ADAPTIVE_THRESH_MEAN_CADAPTIVE_THRESH_GAUSSIAN_C
其原理是对每个像素,根据周围窗口的均值或加权均值动态计算阈值。
该方法适合文字识别、复杂背景下的前景提取,但计算复杂度较高。
基于区域的图像分割
1. 区域生长法
区域生长法从一个或多个种子点出发,根据相似性准则(灰度差、颜色距离)不断合并相邻像素,形成区域。
其基本步骤:
- 选取种子点
- 计算相邻像素与区域的相似度
- 满足条件则合并
- 重复直到不再生长
该方法对噪声敏感,种子点选择对结果影响较大,但分割结果具有较好的连通性。
2. 分裂与合并
分裂与合并方法基于四叉树思想:
- 当区域不满足一致性条件时进行分裂
- 相邻区域满足条件时进行合并
其优点是结构清晰,适合规则图像,但对复杂自然场景适应性较差。
基于边缘的图像分割
边缘分割的核心思想是:
区域之间的边界通常对应图像中灰度或颜色变化剧烈的位置。
1. 边缘检测算子
OpenCV 提供了多种边缘检测算子:
- Sobel
- Scharr
- Laplacian
- Canny
其中 Canny 算法应用最广,主要包括:
- 高斯滤波去噪
- 计算梯度幅值和方向
- 非极大值抑制
- 双阈值连接边缘
边缘检测结果往往是不闭合的轮廓,通常需要结合形态学操作或轮廓提取才能完成区域分割。
基于聚类的图像分割
1. K-means 聚类分割
K-means 将像素视为特征向量(如 RGB、HSV),通过最小化类内距离完成聚类:
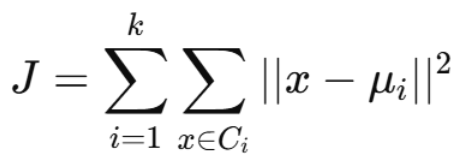
OpenCV 中通过 cv::kmeans() 实现。
其优点是实现简单、效果直观;缺点是需要预先指定 K 值,且对初始中心敏感。
2. MeanShift 分割
MeanShift 是一种基于密度估计的非参数聚类方法,OpenCV 提供 pyrMeanShiftFiltering() 接口。
该方法能够较好地保持边缘信息,适合彩色图像分割,但计算量较大,不适合实时场景。
基于图论的分割方法
1. 图割(Graph Cut)
图割方法将图像建模为图结构:
- 像素为节点
- 像素间相似度为边权
- 分割问题转化为最小割问题
OpenCV 中的 grabCut() 是图割思想的经典实现,结合前景/背景模型进行迭代优化。
GrabCut 在交互式前景提取中应用广泛,分割效果好,但需要用户提供初始区域。
2. 分水岭算法(Watershed)
分水岭将灰度图视为地形图:
- 灰度低 → 山谷
- 灰度高 → 山峰
通过模拟"注水"过程形成分割边界。
OpenCV 的 watershed() 常与距离变换、形态学操作结合使用。
分水岭容易产生过分割,通常需要标记控制分水岭来改善结果。
总结
OpenCV 图像分割方法涵盖了从传统图像处理到经典优化理论的多种思路:
- 阈值法:简单高效,适合规则场景
- 边缘法:强调轮廓信息,需后处理
- 区域法:注重区域一致性
- 聚类法:适合颜色分割
- 图论法:效果好但计算复杂