【算法介绍】
基于YOLOv11的淡水鱼种类检测系统是一种利用深度学习技术,特别是YOLOv11目标检测算法,实现对淡水鱼种类进行自动识别的高效系统,其支持识别的目标种类涵盖:孟加拉鲳鱼(Bangus)、鳙鱼(Big Head Carp)、黑斑鲃(Black Spotted Barb)、鲶鱼(Catfish)、攀鲈(Climbing Perch)、四指马鲅(Fourfinger Threadfish)、淡水鳗鲡(Freshwater Eel)、玻璃鲈鱼(Glass Perchlet)、虾虎鱼(Goby)、金鱼(Gold Fish)、吻口鱼(Gourami)、草鱼(Grass Carp)、绿斑河豚(Green Spotted Puffer)、印度鲤(Indian Carp)、印度鲮(Indo-Pacific Tarpon)、美洲鲈(Jaguar Gapote)、清道夫鱼(Janitor Fish)、刀鱼(Knifefish)、长吻管鳚(Long-Snouted Pipefish)、食蚊鱼(Mosquito Fish)、塘鳢(Mudfish)、鲻鱼(Mullet)、湄公鱼(Pangasius)、鲈鱼(Perch)、油鱼(Scat Fish)、银鲃(Silver Barb)、银鲫(Silver Carp)、银鲈(Silver Perch)、黑鱼(Snakehead)、巨鲶(Tenpounder)及罗非鱼(Tilapia)。
该系统的工作原理是通过训练YOLOv11模型,使其能够准确识别淡水图像或视频中的鱼类种类。YOLOv11作为YOLO系列的最新版本,具有强大的特征提取能力和高效的推理速度,这使得它能够在复杂的水下环境中快速、准确地检测出淡水鱼,并标注出其种类和位置。
在构建该系统时,首先需要准备一个包含各种淡水鱼图像的数据集,并对这些图像进行标注,包括鱼类的位置和类别信息。然后,使用这些数据对YOLOv11模型进行训练,使其学习到淡水鱼的特征。训练完成后,系统就可以对输入的淡水鱼图像或视频进行实时检测,并输出检测结果。
该系统可以广泛应用于淡水渔业资源管理、生态保护、水产养殖等领域。例如,在水产养殖中,通过该系统可以实时监测鱼塘中的鱼类种类和数量,为养殖者提供决策依据。在生态保护方面,该系统可以帮助科研人员更好地了解淡水鱼类的分布和数量,为生态保护提供数据支持。
总之,基于YOLOv11的淡水鱼种类检测系统是一种高效、准确的目标检测系统,具有广泛的应用前景。
【效果展示】
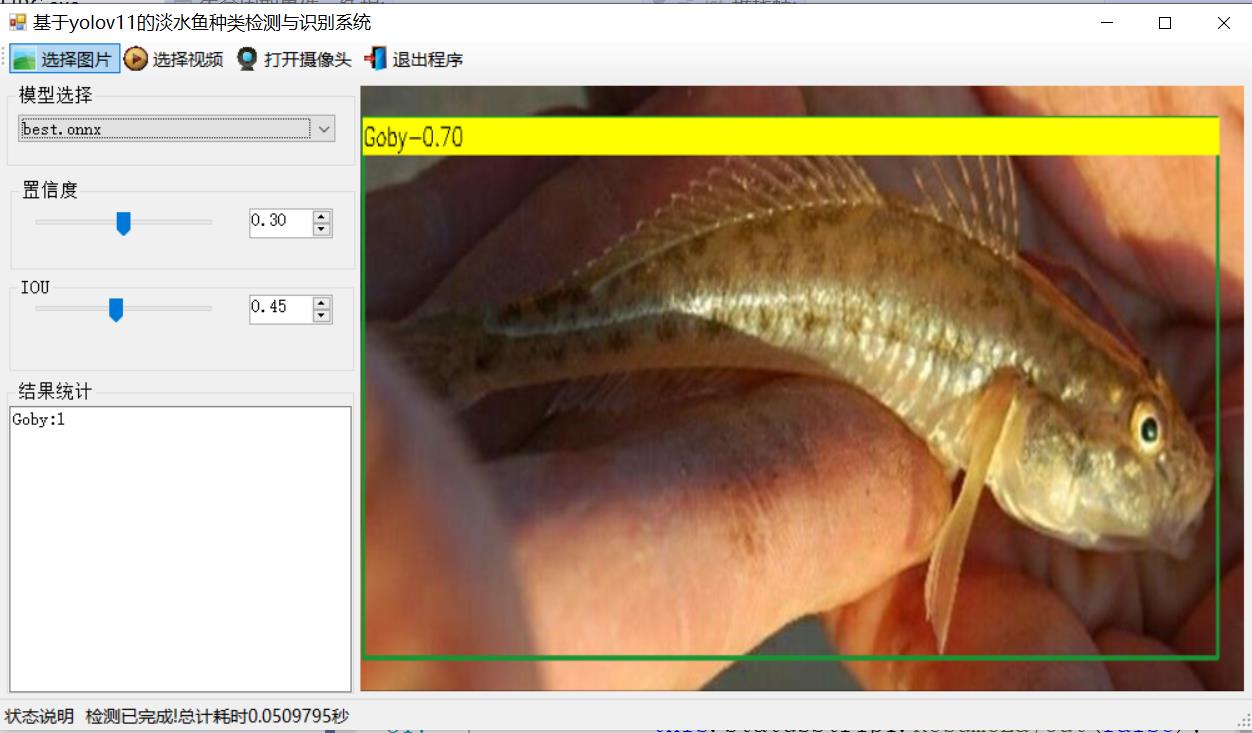

【测试环境】
windows10 x64系统
VS2019
netframework4.7.2
opencvsharp4.9.0
onnxruntime1.22.0
注意使用CPU推理,没有使用cuda推理因此不需要电脑具有nvidia显卡,无需安装安装cuda+dunn
【训练数据集介绍】
数据集格式:Pascal VOC格式+YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件)
图片数量(jpg文件个数):2967
标注数量(xml文件个数):2967
标注数量(txt文件个数):2967
标注类别数:31
标注类别名称(注意yolo格式类别顺序不和这个对应,而以labels文件夹classes.txt为准):"Bangus","Big Head Carp","Black Spotted Barb","Catfish","Climbing Perch","Fourfinger Threadfish","Freshwater Eel","Glass Perchlet","Goby","Gold Fish","Gourami","Grass Carp","Green Spotted Puffer","Indian Carp","Indo-Pacific Tarpon","Jaguar Gapote","Janitor Fish","Knifefish","Long-Snouted Pipefish","Mosquito Fish","Mudfish","Mullet","Pangasius","Perch","Scat Fish","Silver Barb","Silver Carp","Silver Perch","Snakehead","Tenpounder","Tilapia"
每个类别标注的框数:
Bangus 框数 = 81
Big Head Carp 框数 = 77
Black Spotted Barb 框数 = 76
Catfish 框数 = 84
Climbing Perch 框数 = 91
Fourfinger Threadfish 框数 = 55
Freshwater Eel 框数 = 77
Glass Perchlet 框数 = 89
Goby 框数 = 118
Gold Fish 框数 = 81
Gourami 框数 = 87
Grass Carp 框数 = 170
Green Spotted Puffer 框数 = 60
Indian Carp 框数 = 75
Indo-Pacific Tarpon 框数 = 86
Jaguar Gapote 框数 = 75
Janitor Fish 框数 = 88
Knifefish 框数 = 83
Long-Snouted Pipefish 框数 = 84
Mosquito Fish 框数 = 91
Mudfish 框数 = 55
Mullet 框数 = 86
Pangasius 框数 = 87
Perch 框数 = 81
Scat Fish 框数 = 67
Silver Barb 框数 = 98
Silver Carp 框数 = 74
Silver Perch 框数 = 80
Snakehead 框数 = 81
Tenpounder 框数 = 104
Tilapia 框数 = 1763
总框数:4304
使用标注工具:labelImg
标注规则:对类别进行画矩形框
重要说明:暂无
特别声明:本数据集不对训练的模型或者权重文件精度作任何保证,数据集只提供准确且合理标注
图片预览:
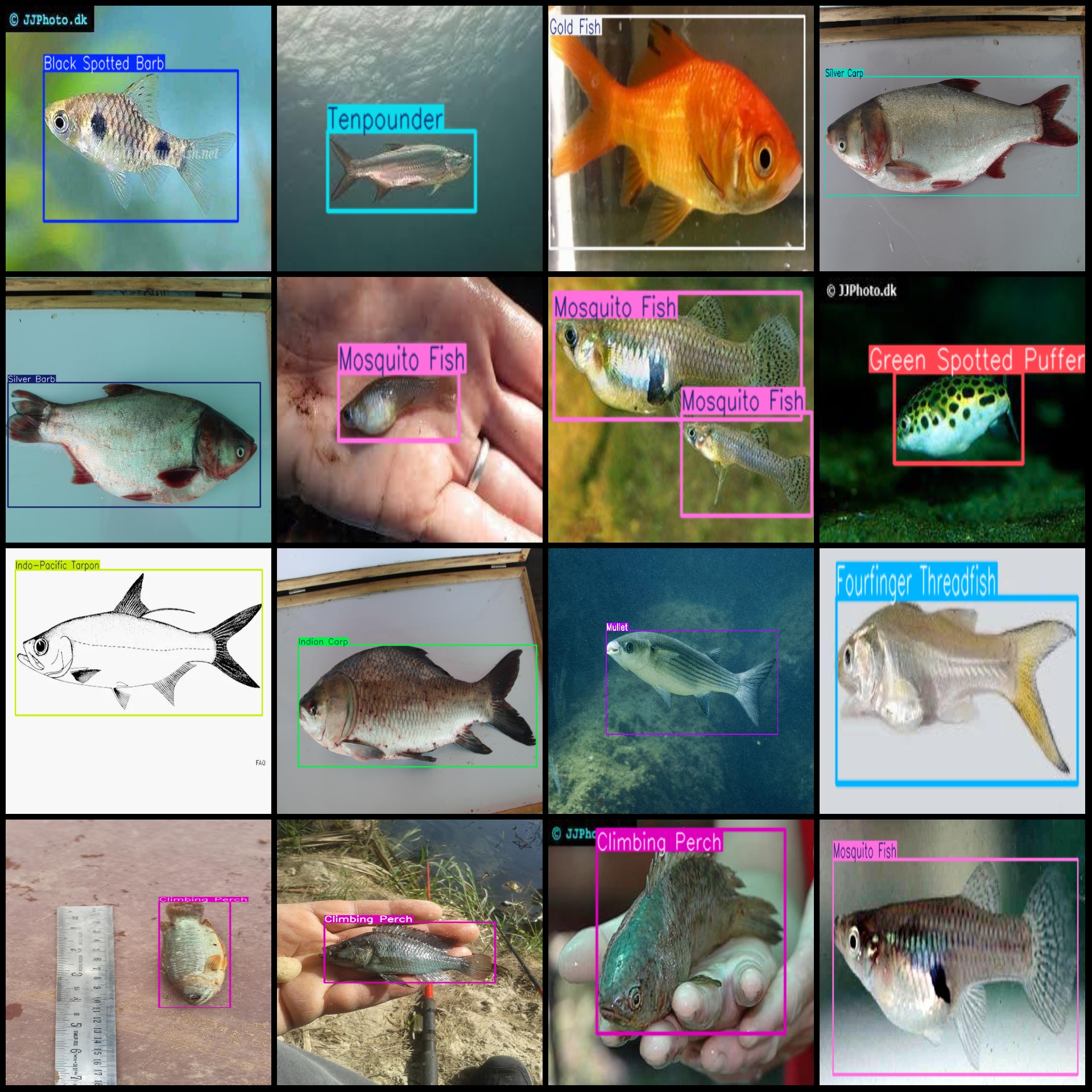
标注例子:
【训练信息】
|-----------------|-------|
| 参数 | 值 |
| 训练集图片数 | 2003 |
| 验证集图片数 | 760 |
| 训练map | 75.6% |
| 训练精度(Precision) | 75.6% |
| 训练召回率(Recall) | 69.8% |
验证集评估精度信息:
|-----------------------|--------|-----------|-------|-------|-------|----------|
| Class | Images | Instances | P | R | mAP50 | mAP50-95 |
| all | 760 | 966 | 0.756 | 0.698 | 0.756 | 0.628 |
| Bangus | 8 | 12 | 0.585 | 0.417 | 0.462 | 0.418 |
| Big Head Carp | 15 | 15 | 0.725 | 0.467 | 0.561 | 0.511 |
| Black Spotted Barb | 12 | 13 | 0.606 | 0.593 | 0.584 | 0.513 |
| Catfish | 11 | 11 | 0.546 | 0.636 | 0.531 | 0.345 |
| Climbing Perch | 12 | 12 | 0.713 | 0.917 | 0.882 | 0.713 |
| Fourfinger Threadfish | 9 | 9 | 0.332 | 0.889 | 0.685 | 0.546 |
| Freshwater Eel | 14 | 14 | 0.786 | 0.857 | 0.87 | 0.726 |
| Glass Perchlet | 13 | 13 | 0.61 | 0.723 | 0.663 | 0.565 |
| Goby | 51 | 54 | 0.888 | 0.439 | 0.79 | 0.645 |
| Gold Fish | 6 | 6 | 0.904 | 1 | 0.995 | 0.94 |
| Gourami | 9 | 9 | 0.962 | 1 | 0.995 | 0.83 |
| Grass Carp | 22 | 22 | 0.618 | 0.864 | 0.746 | 0.655 |
| Green Spotted Puffer | 15 | 15 | 0.955 | 0.933 | 0.988 | 0.829 |
| Indian Carp | 11 | 11 | 0.393 | 0.545 | 0.389 | 0.311 |
| Indo-Pacific Tarpon | 8 | 9 | 0.124 | 0.333 | 0.156 | 0.139 |
| Jaguar Gapote | 11 | 11 | 0.771 | 0.921 | 0.968 | 0.906 |
| Janitor Fish | 19 | 21 | 0.84 | 0.619 | 0.749 | 0.543 |
| Knifefish | 10 | 10 | 0.963 | 1 | 0.995 | 0.87 |
| Long-Snouted Pipefish | 18 | 20 | 0.929 | 0.651 | 0.823 | 0.561 |
| Mosquito Fish | 13 | 14 | 1 | 0.627 | 0.786 | 0.595 |
| Mudfish | 13 | 13 | 0.361 | 0.462 | 0.499 | 0.413 |
| Mullet | 13 | 16 | 0.691 | 0.625 | 0.644 | 0.589 |
| Pangasius | 12 | 12 | 0.88 | 0.917 | 0.951 | 0.837 |
| Perch | 29 | 29 | 1 | 0.87 | 0.98 | 0.917 |
| Scat Fish | 46 | 46 | 0.987 | 0.848 | 0.981 | 0.811 |
| Silver Barb | 52 | 54 | 0.87 | 0.371 | 0.693 | 0.585 |
| Silver Carp | 16 | 16 | 0.778 | 0.938 | 0.786 | 0.71 |
| Silver Perch | 39 | 40 | 0.801 | 0.65 | 0.808 | 0.652 |
| Snakehead | 46 | 49 | 0.916 | 0.447 | 0.788 | 0.507 |
| Tenpounder | 75 | 80 | 0.98 | 0.275 | 0.793 | 0.668 |
| Tilapia | 130 | 310 | 0.921 | 0.79 | 0.906 | 0.602 |
【界面代码】
using DeploySharp.Data;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Diagnostics;
using System.Drawing;
using System.IO;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace FIRC
{
public partial class Form1 : Form
{
public bool videoStart = false;//视频停止标志
string weightsPath = Application.StartupPath + "\\weights";//模型目录
YoloDetector detetor = new YoloDetector();//推理引擎
public Form1()
{
InitializeComponent();
CheckForIllegalCrossThreadCalls = false;//线程更新控件不报错
}
private void LoadWeightsFromDir()
{
var di = new DirectoryInfo(weightsPath);
foreach(var fi in di.GetFiles("*.onnx"))
{
comboBox1.Items.Add(fi.Name);
}
if(comboBox1.Items.Count>0)
{
comboBox1.SelectedIndex = 0;
}
else
{
tssl_show.Text = "未找到模型,请关闭程序,放入模型到weights文件夹!";
tsb_pic.Enabled = false;
tsb_video.Enabled = false;
tsb_camera.Enabled = false;
}
}
private void Form1_Load(object sender, EventArgs e)
{
LoadWeightsFromDir();//从目录加载模型
}
public string GetResultString(DetResult[] result)
{
Dictionary<string, int> resultDict = new Dictionary<string, int>();
for (int i = 0; i < result.Length; i++)
{
if(resultDict.ContainsKey( result[i].Category) )
{
resultDict[result[i].Category]++;
}
else
{
resultDict[result[i].Category] =1;
}
}
var resultStr = "";
foreach(var item in resultDict)
{
resultStr += string.Format("{0}:{1}\r\n",item.Key,item.Value);
}
return resultStr;
}
private void tsb_pic_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
if (ofd.ShowDialog() != DialogResult.OK) return;
tssl_show.Text = "正在检测中...";
Task.Run(() => {
var sw = new Stopwatch();
sw.Start();
Mat image = Cv2.ImRead(ofd.FileName);
detetor.SetParams(Convert.ToSingle(numericUpDown1.Value), Convert.ToSingle(numericUpDown2.Value));
var results=detetor.Inference(image);
var resultImage = detetor.DrawImage(image, results);
sw.Stop();
pb_show.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(resultImage);
tb_res.Text = GetResultString(results);
tssl_show.Text = "检测已完成!总计耗时"+sw.Elapsed.TotalSeconds+"秒";
});
}
public void VideoProcess(string videoPath)
{
Task.Run(() => {
detetor.SetParams(Convert.ToSingle(numericUpDown1.Value), Convert.ToSingle(numericUpDown2.Value));
VideoCapture capture = new VideoCapture(videoPath);
if (!capture.IsOpened())
{
tssl_show.Text="视频打开失败!";
return;
}
Mat frame = new Mat();
var sw = new Stopwatch();
int fps = 0;
while (videoStart)
{
capture.Read(frame);
if (frame.Empty())
{
Console.WriteLine("data is empty!");
break;
}
sw.Start();
var results = detetor.Inference(frame);
var resultImg = detetor.DrawImage(frame,results);
sw.Stop();
fps = Convert.ToInt32(1 / sw.Elapsed.TotalSeconds);
sw.Reset();
Cv2.PutText(resultImg, "FPS=" + fps, new OpenCvSharp.Point(30, 30), HersheyFonts.HersheyComplex, 1.0, new Scalar(255, 0, 0), 3);
//显示结果
pb_show.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(resultImg);
tb_res.Text = GetResultString(results);
Thread.Sleep(5);
}
capture.Release();
pb_show.Image = null;
tssl_show.Text = "视频已停止!";
tsb_video.Text = "选择视频";
});
}
public void CameraProcess(int cameraIndex=0)
{
Task.Run(() => {
detetor.SetParams(Convert.ToSingle(numericUpDown1.Value), Convert.ToSingle(numericUpDown2.Value));
VideoCapture capture = new VideoCapture(cameraIndex);
if (!capture.IsOpened())
{
tssl_show.Text = "摄像头打开失败!";
return;
}
Mat frame = new Mat();
var sw = new Stopwatch();
int fps = 0;
while (videoStart)
{
capture.Read(frame);
if (frame.Empty())
{
Console.WriteLine("data is empty!");
break;
}
sw.Start();
var results = detetor.Inference(frame);
var resultImg = detetor.DrawImage(frame, results);
sw.Stop();
fps = Convert.ToInt32(1 / sw.Elapsed.TotalSeconds);
sw.Reset();
Cv2.PutText(resultImg, "FPS=" + fps, new OpenCvSharp.Point(30, 30), HersheyFonts.HersheyComplex, 1.0, new Scalar(255, 0, 0), 3);
//显示结果
pb_show.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(resultImg);
tb_res.Text = GetResultString(results);
Thread.Sleep(5);
}
capture.Release();
pb_show.Image = null;
tssl_show.Text = "摄像头已停止!";
tsb_camera.Text = "打开摄像头";
});
}
private void tsb_video_Click(object sender, EventArgs e)
{
if(tsb_video.Text=="选择视频")
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = "视频文件(*.*)|*.mp4;*.avi";
if (ofd.ShowDialog() != DialogResult.OK) return;
videoStart = true;
VideoProcess(ofd.FileName);
tsb_video.Text = "停止";
tssl_show.Text = "视频正在检测中...";
}
else
{
videoStart = false;
}
}
private void tsb_camera_Click(object sender, EventArgs e)
{
if (tsb_camera.Text == "打开摄像头")
{
videoStart = true;
CameraProcess(0);
tsb_camera.Text = "停止";
tssl_show.Text = "摄像头正在检测中...";
}
else
{
videoStart = false;
}
}
private void tsb_exit_Click(object sender, EventArgs e)
{
videoStart = false;
this.Close();
}
private void trackBar1_Scroll(object sender, EventArgs e)
{
numericUpDown1.Value = Convert.ToDecimal(trackBar1.Value / 100.0f);
}
private void trackBar2_Scroll(object sender, EventArgs e)
{
numericUpDown2.Value = Convert.ToDecimal(trackBar2.Value / 100.0f);
}
private void numericUpDown1_ValueChanged(object sender, EventArgs e)
{
trackBar1.Value = (int)(Convert.ToSingle(numericUpDown1.Value) * 100);
}
private void numericUpDown2_ValueChanged(object sender, EventArgs e)
{
trackBar2.Value = (int)(Convert.ToSingle(numericUpDown2.Value) * 100);
}
private void comboBox1_SelectedIndexChanged(object sender, EventArgs e)
{
tssl_show.Text="加载模型:"+comboBox1.Text;
detetor.LoadWeights(weightsPath+"\\"+comboBox1.Text);
tssl_show.Text = "模型加载已完成!";
}
}
}【常用评估参数介绍】
在目标检测任务中,评估模型的性能是至关重要的。你提到的几个术语是评估模型性能的常用指标。下面是对这些术语的详细解释:
- Class :
- 这通常指的是模型被设计用来检测的目标类别。例如,一个模型可能被训练来检测车辆、行人或动物等不同类别的对象。
- Images :
- 表示验证集中的图片数量。验证集是用来评估模型性能的数据集,与训练集分开,以确保评估结果的公正性。
- Instances :
- 在所有图片中目标对象的总数。这包括了所有类别对象的总和,例如,如果验证集包含100张图片,每张图片平均有5个目标对象,则Instances为500。
- P(精确度Precision) :
- 精确度是模型预测为正样本的实例中,真正为正样本的比例。计算公式为:Precision = TP / (TP + FP),其中TP表示真正例(True Positives),FP表示假正例(False Positives)。
- R(召回率Recall) :
- 召回率是所有真正的正样本中被模型正确预测为正样本的比例。计算公式为:Recall = TP / (TP + FN),其中FN表示假负例(False Negatives)。
- mAP50 :
- 表示在IoU(交并比)阈值为0.5时的平均精度(mean Average Precision)。IoU是衡量预测框和真实框重叠程度的指标。mAP是一个综合指标,考虑了精确度和召回率,用于评估模型在不同召回率水平上的性能。在IoU=0.5时,如果预测框与真实框的重叠程度达到或超过50%,则认为该预测是正确的。
- mAP50-95 :
- 表示在IoU从0.5到0.95(间隔0.05)的范围内,模型的平均精度。这是一个更严格的评估标准,要求预测框与真实框的重叠程度更高。在目标检测任务中,更高的IoU阈值意味着模型需要更准确地定位目标对象。mAP50-95的计算考虑了从宽松到严格的多个IoU阈值,因此能够更全面地评估模型的性能。
这些指标共同构成了评估目标检测模型性能的重要框架。通过比较不同模型在这些指标上的表现,可以判断哪个模型在实际应用中可能更有效。
【使用步骤】
使用步骤:
(1)首先根据官方框架ultralytics安装教程安装好yolov11环境,并根据官方export命令将自己pt模型转成onnx模型,然后去github仓库futureflsl/firc-csharp-projects找到源码
(2)使用vs2019打开sln项目,选择x64 release并且修改一些必要的参数,比如输入shape等,点击运行即可查看最后效果
特别注意如果运行报错了,请参考我的博文进行重新引用我源码的DLL:C#opencvsharp报错System.Memory,Version=4.0.1.2,Culture=neutral,PublicKeyToken=cc7b13fcd2ddd51"版本高于所引_未能加载文件或程序集"system.memory, version=4.0.1.2, culture-CSDN博客
【提供文件】
C#源码
yolo11n.onnx模型(提供pytorch模型)
训练的map,P,R曲线图(在weights\results.png)
测试图片(在test_img文件夹下面)
特别注意这里不提供训练数据集