1、内外参数标定
自动驾驶传感器的"标定"(Calibration)是保证感知系统准确性的基石。如果配置是"设置功能",那么标定就是"修正误差"和"统一坐标系"。
标定主要分为三类:
-
内参标定 (Intrinsics): 修正传感器自身的制造误差和物理特性(如镜头畸变)。
-
外参标定 (Extrinsics): 确定传感器在车身上的确切位置和朝向(6自由度)。
-
时间标定 (Temporal): 确定各传感器之间的时间偏移(Time Offset)。
以下是各传感器详细的标定参数清单:
1.1 摄像头
摄像头的标定最为复杂,因为它将3D世界投影到了2D平面,且受光学影响大。
A. 内参标定 (Intrinsics)
目的是建立像素坐标系与相机坐标系的映射关系。
-
内参矩阵 (Camera Matrix K):
-
fx,fyfx,fy: 焦距(以像素为单位)。
-
cx,cycx,cy: 主点(光心在图像上的中心坐标)。
-
畸变系数 (Distortion Coefficients):
-
针孔模型 (Pinhole): 径向畸变 (k1,k2,k3k1,k2,k3) 和切向畸变 (p1,p2p1,p2)。
-
鱼眼模型 (Fisheye): 等距投影参数 (k1,k2,k3,k4k1,k2,k3,k4)。鱼眼镜头必须标定这些参数才能将弯曲的图像"拉直"。
B. 外参标定 (Extrinsics)
目的是将相机坐标系转换到自车坐标系(Vehicle Frame)。
-
旋转矩阵 (Rotation, R): 欧拉角 (Roll, Pitch, Yaw) 或四元数。
-
平移向量 (Translation, T): 相机光心相对于后轴中心的 x,y,zx,y,z 距离。
| 参数 | 含义 | 关键要素 |
|---|---|---|
| 内参(Intrinsic) | 描述摄像头内部光学模型,将三维相机坐标系点投影到二维图像平面。包括焦距、主点、像素比例、径向/切向畸变系数等。 | 需要在不受外部姿态影响的条件下完成标定。 |
| 外参(Extrinsic) | 描述摄像头坐标系相对于车辆坐标系(或世界坐标系)的刚体变换,由旋转矩阵 R 与平移向量 T 组成(共 6 个自由度)。 | 直接决定多摄像头融合、环视拼接、目标定位的几何关系。 |
内参标定流程与常用工具
| 步骤 | 说明 | 推荐实现方式 |
|---|---|---|
| ① 制作/选取标定板 | 常用棋盘格、圆点板、AprilTag 等已知几何尺寸的标定靶。棋盘格尺寸应约为视场的 1/3,厚度需在标定模型中补偿。 | 纸质或金属棋盘格;AprilTag 适用于自动化采图。 |
| ② 多姿态拍摄 | 将标定板放置在不同位置、姿态(平面、倾斜、远近),确保每张图像覆盖足够的特征点。对鱼眼摄像头尤其要覆盖全视角。 | 手动拍摄或使用标定设备自动拍图(如研鼎系统)。 |
| ③ 特征点提取 | 使用 OpenCV findChessboardCorners、findCirclesGrid 或 AprilTag 检测库提取亚像素级角点。 | OpenCV、AprilTag ROS 包。 |
| ④ 求解内参模型 | 采用张正友针孔模型(5--6 参数)或鱼眼模型(8 参数),通过最小二乘/LM 优化得到焦距、主点、畸变系数。 | OpenCV calibrateCamera、fisheye::calibrate;Kalibr(针对多传感器)。 |
| ⑤ 验证与误差评估 | 计算重投影误差(RMS),误差 < 0.5 像素为常用阈值;若误差偏大,需重新采集或更换标定板。 | OpenCV projectPoints + 误差统计脚本。 |
| ⑥ 保存与部署 | 将内参矩阵 K、畸变系数 D 保存为 YAML/JSON,供后续感知算法读取。 | ROS 参数服务器或车辆 ECU 配置文件。 |
外参标定方法与关键技术
| 方法 | 原理 | 适用场景 | 参考文献 |
|---|---|---|---|
| ① 基于标定板的刚体求解 | 将同一标定板在车辆坐标系中固定位置拍摄多摄像头图像,利用已知板上特征点的世界坐标与图像坐标对应,分别求解每台摄像头的 R、T。 | 出厂前人工标定、少量摄像头(2--4 台) | |
| ② AprilTag/ArUco 多目标标定 | 在车辆周围布置多个已知姿态的 AprilTag,利用多视角检测得到每个 Tag 在各摄像头坐标系下的位姿,进而求解摄像头相对车辆坐标的外参。 | 自动化流水线、需要高重复性的批量标定 | |
| ③ 车道线/道路特征自标定 | 通过检测道路车道线、消失点、纹理特征等自然场景几何信息,构建约束方程(如 Kruppa 方程、Vanishing‑point 约束),实现 在线自标定。 | 车辆运行期间的在线校正,适用于长时间使用后外参漂移的情况 | |
| ④ 时空融合联合标定 | 结合多帧时间序列的位姿估计(四元数球面线性插值)与相邻摄像头的纹理拼接误差,联合优化所有摄像头的外参,显著提升姿态精度(误差降低 0.1°--1.1°)。 | 高精度环视系统、算力受限的车载平台 | |
| ⑤ 基于里程计/IMU 融合 | 将车载里程计或 IMU 提供的相对位姿作为先验,配合视觉特征匹配进行外参微调。 | 多传感器融合平台(摄像头+雷达+IMU) |
1.2 Lidar
LiDAR 是3D空间感知的基准。
A. 内参标定 (Intrinsics) - 通常由厂家完成
-
垂直角度修正: 每一束激光(如64线)的实际垂直发射角度偏差。
-
距离修正: 针对不同反射率物体的测距误差补偿(强度-距离修正表)。
-
旋转镜偏心补偿: 内部旋转部件的安装误差。
B. 外参标定 (Extrinsics) - 用户/车企必须做
-
6-DOF 参数 (x,y,z,roll,pitch,yawx,y,z,roll,pitch,yaw): LiDAR 坐标系相对于车身坐标系(或 IMU 坐标系)的位姿。
-
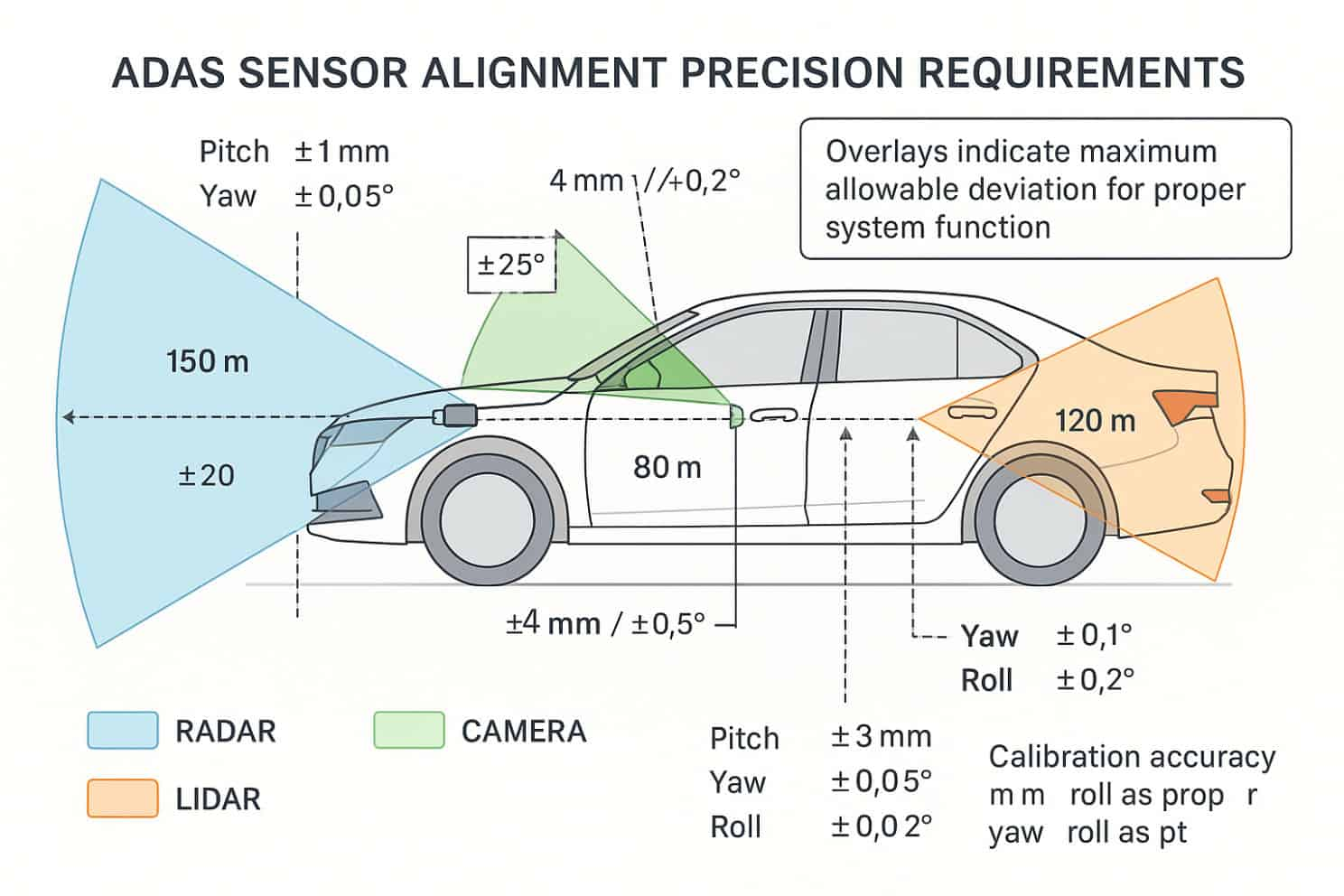
重要性: 如果 Pitch 角标定错 1 度,在 100 米外,地面高度误差可能接近 2 米,导致把路面当成障碍物(幽灵刹车)。
内参标定(Intrinsic Calibration)
| 内容 | 关键要点 |
|---|---|
| 定义 | 校准激光发射器、接收器、扫描镜之间的几何关系,使得每个激光束的俯仰角、方位角、距离误差最小化。 |
| 何时进行 | 大多数厂商在出厂时已完成内参标定,用户一般不需要重复;若出现系统漂移或更换硬件,可在实验室使用标定靶板进行二次校准。 |
| 常用方法 | - 靶板法:使用已知尺寸的圆锥体或多面靶标,采集多视角点云,利用几何约束求解内参矩阵。 - 优化法:基于启发式或粒子群优化,对内参矩阵进行迭代最小化标定误差。 |
| 工具 | OpenCV(用于特征提取)、PCL(点云处理)、MATLAB/ROS 自带的 lidar_calibration 包。 |
如果使用的是市面常见的 16/32 线束 LiDAR(如 Velodyne VLP‑16),可以直接采用厂家提供的内参文件;若自行研发或改装硬件,建议在实验室使用多面靶标进行一次完整的内参标定,以确保后续外参标定的准确性。
外参标定(Extrinsic Calibration)
外参标定的目标是求解 6 个自由度(3 个平移 + 3 个旋转),即雷达坐标系相对于车辆坐标系(常以后轴中心或车体原点为基准)的变换矩阵。
标定流程(典型步骤)
| 步骤 | 说明 | 常用技术/工具 |
|---|---|---|
| ① 选取标定靶标 | - 平面标定板(棋盘格、ArUco、圆形阵列) - 三面/三维靶标(如三角形立体板) - 反射球或激光靶点 | |
| ② 多姿态采集 | 将车辆(或雷达)在不同已知姿态下扫描靶标,至少采集 4--6 组对应点,以保证方程可解。 | |
| ③ 特征提取 | 使用 OpenCV 检测棋盘格/ArUco 角点,或利用 RANSAC 对点云平面进行分割,提取靶标的 3D 坐标。 | |
| ④ 求解变换 | - 最小二乘法:对对应点进行线性求解。 - 非线性优化(Levenberg‑Marquardt):进一步降低重投影误差。 - RANSAC:剔除异常点,提高鲁棒性。 | |
| ⑤ 验证与误差评估 | 计算点云在车辆坐标系下的重投影误差(一般 < 2 cm / < 0.2° 为可接受),并在实际道路场景中检查点云与地图的对齐情况。 | |
| ⑥ 保存与部署 | 将得到的外参矩阵写入 ROS tf 树或车辆感知系统的配置文件中。 |
1.3 Radar
雷达是2D平面传感器(4D雷达除外),对角度非常敏感。
A. 静态/内参标定
- 天线相位校准: 修正发射/接收天线阵列的相位不一致,以保证测角(AOA)精度。
B. 外参标定 (Extrinsics) - 关键在于 Boresight
-
安装位置 (x,y,zx,y,z): 相对车身的位置。
-
轴向对齐 (Boresight Alignment / Azimuth Error): 雷达的偏航角 (Yaw) 偏差。
-
痛点: 雷达主要看前方。如果物理安装偏了 1°,在 150 米外横向误差就有 2.6 米,导致系统分不清前车是在本车道还是隔壁车道。通常需要通过软件标定值来补偿物理安装误差。
-
内参标定侧重于消除雷达本身的测距与角度偏差,通常通过已知距离的金属角反射器进行误差曲线拟合。
-
外参标定包括水平角、俯仰角以及平移量的求解,常用对称布置的角反射器配合激光定位仪实现;多雷达或雷达‑摄像头联合标定则通过同一靶具的点云/图像配准完成。
车载毫米波雷达的内外参标定概览
| 项目 | 主要内容 | 典型实现方式 |
|---|---|---|
| 内参(Intrinsic) | • 距离偏置(range bias) • 天线阵列相位/增益校正 • 波束宽度、角分辨率 • 噪声模型(σ_range、σ_angle) | 1)使用已知距离的金属角反射器(或三棱锥)在不同视角、不同距离上采集回波,拟合距离误差曲线; 2)对天线阵列进行相位阵列校准,常用相干波束成形实验室平台; 3)通过激光测距仪对标靶位置进行亚‑厘米级测量,作为真值进行误差统计。 |
| 外参(Extrinsic) | • 雷达相对于车辆坐标系的平移 (x, y, z) 与姿态 (yaw, pitch, roll) • 与其他传感器(摄像头、激光雷达)的相对位姿 | 1)水平角(yaw)标定:在车辆后轮两侧对称布置角反射器,利用激光平行光束定位反射器中心,调节雷达水平角使左右两组回波对称。 2)俯仰角(pitch)标定:在同一对称线上放置三组高度不同的角反射器(同高、+15 cm、‑15 cm),调节雷达俯仰角,使中高反射强度最高、上下两侧强度相等。 3)多雷达联合标定:对主雷达与从雷达分别采集同一标靶的点云,利用已知标靶间固定距离求解相对位姿,得到 7 自由度外参。 4)雷达‑摄像头联合标定:先完成摄像头内参标定,再在同一标靶(棋盘格或金属三角锥)上获取图像坐标与雷达点云,构建最小化投影误差的非线性优化(Levenberg‑Marquardt)得到 R、t 矩阵。 |
| 标定靶具 | • 角反射器(Trihedral corner reflector):高金属反射率,适用于水平/俯仰角标定; • 金属三角锥/平板:用于雷达‑摄像头、雷达‑激光雷达联合标定; • 棋盘格或标定板:提供已知世界坐标点,便于相机‑雷达配准。 | 角反射器需满足平面度 ≤ 0.1 mm(80 mm×80 mm 区域);三角锥高度差 15 cm 为常用间距。 |
1.4 USS
超声波标定相对简单,主要依赖物理安装。
-
位置标定: 每个探头在保险杠上的确切坐标 (x,y)(x,y)。
-
朝向标定: 探头法线方向与车身纵轴的夹角。
-
用途: 用于三角定位算法,计算障碍物的确切位置而不仅仅是距离。
| 参数 | 含义 | 关键影响因素 |
|---|---|---|
| 内参 | 声波传播模型、距离比例系数、温湿度补偿系数 | 声速随温度、湿度、气压变化;传感器本身的非线性误差 |
| 外参 | 传感器在车辆坐标系中的位置 与姿态 | 安装角度误差、车体振动、装配公差 |
超声波雷达的内参主要是 声速模型 与 距离标定系数,外参则是 刚体变换(平移+旋转)。
1.5 GNSS
GNSS 的标定主要是几何尺寸标定。
A. 杆臂标定 (Lever Arm)
-
天线相位中心到 IMU 中心的距离 (x,y,zx,y,z):
-
GNSS 天线通常在车顶,IMU 通常在车内。组合导航算法(Kalman Filter)计算的是 IMU 的位置。
-
必须标定:天线接收到信号的位置与 IMU 位置之间的刚性连接矢量。如果这个标定不准,转弯时会产生巨大的定位甩尾误差。
| 项目 | 含义 | 关键标定要素 | 常用标定手段 |
|---|---|---|---|
| 内参(Intrinsic) | 天线本身的相位中心偏差(PCO)和相位中心变化(PCV),即天线在不同入射角下的相对位移。 | • PCO:天线相位中心相对于天线参考点的三维偏移(NEU) • PCV:随卫星高度角/方位角的标量变化 | • 暗室/微波暗室法、机械臂相对标定、室外短基线相对标定等 |
| 外参(Extrinsic) | GNSS 天线相对于车辆坐标系(车体、IMU、里程计、摄像头等)的刚体变换(平移 + 旋转)。 | • 平移向量 t (天线在车体坐标系中的位置) • 旋转矩阵 R (天线坐标轴相对于车体坐标轴的姿态) | • 静态测量(CAD/机械量具) • 动态运动约束(利用车辆运动、IMU、里程计、原始 GNSS 伪距/载波相位) • 融合 LiDAR / 摄像头等多模态信息的目标‑less 方法 |
1.6 IMU
IMU 是定位系统的"参考系核心"。
A. 内参标定 (Intrinsics) - 确定性误差
-
零偏 (Bias): 陀螺仪和加速度计在静止时的非零输出(需温度补偿)。
-
比例因子 (Scale Factor): 实际运动量与输出读数的比例误差。
-
轴间非正交误差 (Misalignment): X、Y、Z 三轴并不完美垂直,需要一个 3×33×3 的矩阵来修正。
B. 外参标定 (Extrinsics)
-
Body-to-IMU Rotation: IMU 坐标系与车辆坐标系的旋转偏差。
-
例如: 车辆在平地上开,IMU 应该输出 Z 轴 1g 加速度。如果安装倾斜了,X 或 Y 轴就会分到重力分量,导致算法以为车辆在加减速或转弯。
车载惯性测量单元(IMU)在自动驾驶、车身动态控制和高精度定位中起到核心作用。为了让 IMU 输出的加速度、角速度能够真实反映车辆运动,需要对以下误差参数进行标定:
| 参数类别 | 典型误差 | 标定目标 |
|---|---|---|
| 零偏(Bias) | 静止时输出不为 0 | 消除系统性偏移 |
| 比例因子(Scale factor) | 输出与真实值比例偏差 | 校正增益误差 |
| 非正交(Mis‑alignment) | 传感器轴之间不正交 | 矫正坐标系耦合 |
| 安装误差(Installation error) | IMU 坐标系与车体坐标系不一致 | 求解旋转/平移外参 |
| 温漂(Temperature drift) | 参数随温度变化 | 建立温度补偿模型 |
| 随机噪声(Noise / Random walk) | 随机漂移、白噪声 | 通过 Allan 方差估计并在滤波中建模 |
标定分为两大块:
| 类型 | 目标 | 常用方法 | 关键步骤 | 参考 |
|---|---|---|---|---|
| 内参(Intrinsic) | 消除传感器本身的零偏、尺度因子、轴间错位以及噪声特性,使原始加速度/角速度数据能够直接映射到真实物理量。 | • 静止多姿态法(重力向量) • 转台标定(已知旋转角度) • 非转台迭代优化(最小二乘/LM) • Allan 方差分析评估随机误差 | 1. 数据采集:在不同姿态(水平、倒置、侧倾)下采集静止段;或使用高精度转台进行已知角速度/加速度输入。 2. 误差模型构建: - 零偏 b 、尺度因子 S 、错位矩阵 M (加速度计/陀螺仪)。 - 随机噪声通过 Allan 方差得到噪声密度、随机漂移等参数。 3. 求解: - 解析法把重力向量的理论值与测量值对应,直接求解 b、S、M 。 - 线性最小二乘把误差模型转化为线性方程组求解。 - 非线性最小二乘(LM)在所有姿态数据上联合优化,提高鲁棒性。 4. 验证:使用 Allan 方差检查噪声特性,确认零偏漂移在可接受范围内。 | IMU 内参标定方法综述(博客);无需外部设备的静止姿态标定方案;分层标定流程(转台/迭代);误差模型理论概述 |
| 外参(Extrinsic) | 确定 IMU 坐标系相对于车体、激光雷达、摄像头或里程计的刚体变换(平移 p 、旋转 R),实现多传感器融合。 | • 手眼标定(AX=XB) • Kalibr / LIO‑SAM 联合标定 • 基于 GNSS/IMU 组合导航的轨迹匹配 • NDT+ICP 生成点云‑IMU 对齐 • 非线性最小二乘/因子图优化 | 1. 同步:先对 IMU 与其他传感器(LiDAR、相机、里程计)进行时间对齐(线性插值)。 2. 初始估计: - 手眼标定直接求解旋转 R (如 ΔR_L · R = R · ΔR_M)。 - 使用 GNSS/IMU 组合导航得到的姿态作为粗略外参。 3. 数据关联:将 IMU 积分姿态与 LiDAR/相机的位姿对应,构建约束方程。 4. 优化: - 在因子图或非线性最小二乘框架中加入姿态、平移约束,统一求解 R、p。 - LIO‑SAM 通过点云‑地图匹配进一步细化外参。 5. 验证:使用已知尺度的点云或 GNSS 轨迹检查残差,确保平移误差在厘米级、旋转误差在 0.1° 以内。 | LiDAR‑IMU 外参联合标定专利;Lidar‑IMU 外参标定脚本(LIO‑SAM);车载 LiDAR/IMU 标定流程(浙江大学);基于 GNSS/IMU 的 LiDAR/IMU 空间标定研究;IMU/ODO 外参估计(预积分) |
内参标定
| 方法 | 是否需要外部设备 | 关键特点 |
|---|---|---|
| 基于转台的分立级标定 | 需要高精度转台 | 解析法或最小二乘法直接求解,精度高但成本大 |
| 静止多姿态(六姿态)标定 | 只需平稳放置 IMU(不需要转台) | 通过将 IMU 放置在六个已知方向(±X、±Y、±Z)获取重力加速度,构建线性方程组求解 |
| 迭代非线性优化(LM、梯度下降) | 可在实验室或车辆上进行 | 将误差模型转化为非线性最小化问题,利用所有采集数据进行全局优化,适合大规模数据 |
| 卡尔曼滤波/扩展卡尔曼滤波 | 需要外部参考(如 GNSS/RTK) | 将 IMU 与高精度定位系统联合,在线估计内参并实时更新,适用于车载实际运行环境 |
| Allan 方差分析 | 只需长时间静止采样 | 用于评估噪声特性(随机游走、白噪声),为后续滤波器设计提供参数 |
| 温度补偿标定 | 需要温度传感器 | 在不同温度下采集数据,建立温度‑尺度/偏置模型,常用于 MEMS IMU |
外参标定
-
姿态外参:用旋转矩阵 R(或四元数 q)描述 IMU 坐标轴相对于车辆坐标轴的角度偏移。
-
位置外参:用平移向量 t 描述 IMU 在车辆坐标系中的相对位置。
-
标定本质是 求解 R、t 使得两套轨迹(IMU 轨迹与车辆/基准传感器轨迹)在同一坐标系下最匹配。
| 方法 | 关键思路 | 适用场景 | 优缺点 |
|---|---|---|---|
| 外部测量法(全站仪、激光测距仪) | 直接测量 IMU 与车体(或基准标记)的相对位姿 | 实验室或标定场地可布置测量仪器 | 精度高,但需要额外硬件、布置复杂 |
| 真值测绘法(GNSS/RTK + 高精度里程计) | 利用 GNSS 提供的全局位姿作为真值,结合 IMU 积分位姿求解外参 | 开阔道路、具备高精度 GNSS | 受 GNSS 信号影响,需长距离直线行驶 |
| 手眼标定法(运动激励 + 最小二乘/非线性优化) | 通过两时刻的位姿变换方程 进行求解 | 车辆上已装配 IMU 与 LiDAR/相机,数据同步即可 | 只需原始传感器数据,需充分激励(大幅转向、加减速) |
| 基于轨迹匹配的在线标定(Kalibr、LIO‑SAM) | 同时估计 IMU‑相机/‑LiDAR 外参和时间偏差,使用滑动窗口优化 | 实时系统、需要在线校正 | 计算量大,需良好初值 |
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
- 现代 MEMS IMU 内置温度传感器并采用在线校准算法,降低温度漂移对姿态估计的影响,满足长时间运行的稳定性要求。
1.7 联合标定
这是自动驾驶中最核心的步骤,将不同传感器"对齐"。
-
LiDAR-Camera 标定:
-
建立 3D 点云与 2D 像素的投影矩阵。让激光雷达的点能准确落在图像中的汽车上(用于给点云上色或深度补全)。
-
LiDAR-IMU 标定 (Hand-Eye Calibration):
-
确定 LiDAR 这一帧与上一帧的运动,与 IMU 测量的运动是否一致,从而解算出 LiDAR 与 IMU 的相对旋转和平移。
-
Camera-Radar 标定:
-
确保视觉识别的"车辆框"中心,与雷达探测到的"反射点"在空间上重合。
1.8 时间标定
-
时间延迟 (Latency/Time Offset):
-
例如:摄像头曝光时刻是 t0t0,数据传到智驾芯片是 t1t1。激光雷达打点是 t2t2。
-
系统需要标定出每个传感器从"采集"到"到达内存"的固定传输延迟,以便将不同传感器的数据对齐到同一物理时刻。
Backup
ICM-20789 由三个独立的振动式 MEMS 速率陀螺仪组成,用于检测绕 X、Y 和 Z 轴的旋转。
当陀螺仪绕任意感测轴旋转时,科里奥利效应会引起振动,并被电容式传感器检测到。
产生的信号经过放大、解调和滤波,产生与角速率成比例的电压。该电压
通过独立的片上 16 位模数转换器 (ADC) 进行数字化,对每个轴进行采样。陀螺仪传感器的满量程范围
可数字编程为 ±250、±500、±1000 或 ±2000 度/秒 (dps)。ADC 采样率可编程为
8,000 次/秒至 3.9 次/秒,用户可选的低通滤波器可实现广泛的截止频率范围。
ICM-20789 的三轴加速度计为每个轴使用单独的检测质量块。沿特定轴的加速度会引起
相应检测质量块的位移,电容式传感器会以差分方式检测该位移。ICM-20789 的
架构降低了加速度计对制造差异和热漂移的敏感性。当设备放置在
平面上时,X 轴和 Y 轴上的测量值为 0g,Z 轴上的测量值为 +1g。加速度计的比例因子在工厂已校准,
并且名义上与电源电压无关。每个传感器都配有专用的 Σ-Δ ADC 来提供数字输出。
数字输出的满量程范围可调为 ±2g、±4g、±8g 或 ±16g。
Ref:https://download.mikroe.com/documents/datasheets/ICM-20789_datasheet.pdf