【AI学习-comfyUI学习-第二十三-法线贴图工作流-depth 结构+MiDaS 法线-各个部分学习】
- 1,前言
- 2,说明
-
- 1,第二十三-法线贴图工作流
- [2,第二十三节-法线贴图2工作流-MiDaS 法线](#2,第二十三节-法线贴图2工作流-MiDaS 法线)
- 3,流程
- 4,模块部分说明
-
- [1 BAE 法线图预处理(comfyui_controlnet_aux)](#1 BAE 法线图预处理(comfyui_controlnet_aux))
- [2 Depth ControlNet(真正的主约束)](#2 Depth ControlNet(真正的主约束))
- [2️⃣ MiDaS 法向预处理器(❗问题起点)](#2️⃣ MiDaS 法向预处理器(❗问题起点))
- 5,细节部分
-
- 1,失败的设计
-
- [✅ 非常适合](#✅ 非常适合)
- [❌ 不适合](#❌ 不适合)
- 6,工作流链接
- 7,总结
1,前言
最近,学习comfyUI,这也是AI的一部分,想将相关学习到的东西尽可能记录下来。
2,说明
1,第二十三-法线贴图工作流
这是一个:用 Depth 锁"空间层次",用 Normal 提供"表面方向提示",但最终让 Prompt + 模型负责"画好看"的平衡型工作流。
bash
真实城市照片
├─→ DepthAnything / depth 结构(远近)
├─→ Normal(表面方向,弱)
↓
ControlNet(Depth 主 + Normal 辅)
↓
Prompt(语义主导)
↓
KSampler(生成)
↓
VAE → 最终图像-
几何 = 辅助
-
语义 = 主导
-
结构不乱,但允许"画"
2,第二十三节-法线贴图2工作流-MiDaS 法线
用原始照片 → 提取"弱法线几何提示" → 同时用深度锁定整体结构 → 在 SDXL 采样过程中前期受控、后期释放,让模型生成"写实但不僵硬"的城市街景图
bash
原始图像
├─→ MiDaS 法线(弱约束)
├─→ Depth(强结构)
└─→ VAE 编码 → Latent
↓
ControlNet(时间控制)
↓
KSampler 采样
↓
VAE 解码 → 最终图适用地方:
-
合成街景数据
-
自动驾驶 / 城市感知
-
检测模型数据增强
-
论文 / 项目 demo
不适用地方:
-
风格插画
-
二次元
-
强艺术风格迁移
3,流程
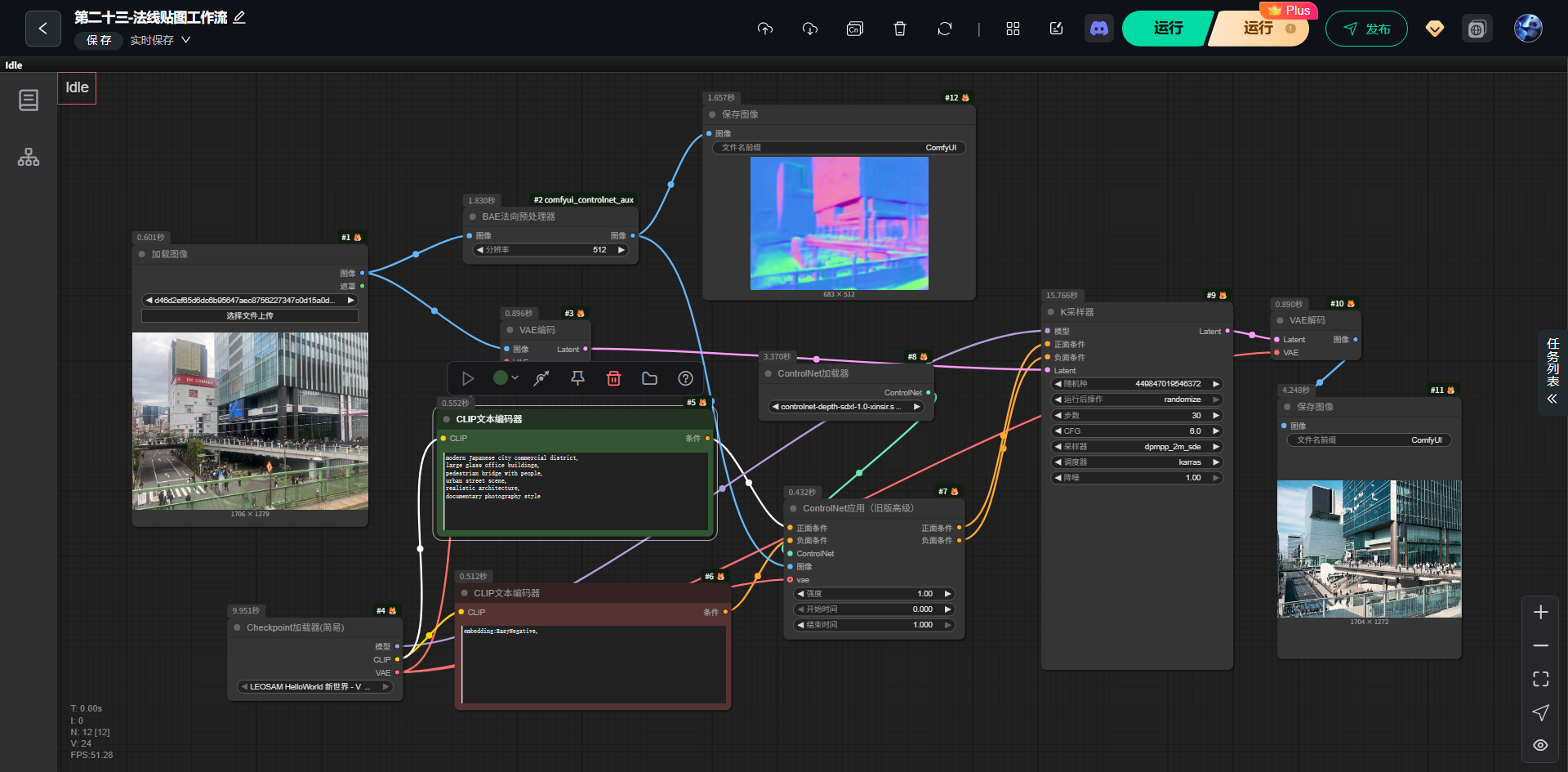
1-第二十三-法线贴图工作流
本工作流以深度约束为主、法线约束为辅,在保证城市空间层次一致性的同时,保留扩散模型的视觉生成自由度,从而实现结构稳定且视觉可读的城市街景生成。
(1)调用模块
(2)输出 提示词
bash
modern Japanese city commercial district,
large glass office buildings,
pedestrian bridge with people,
urban street scene,
realistic architecture,
documentary photography style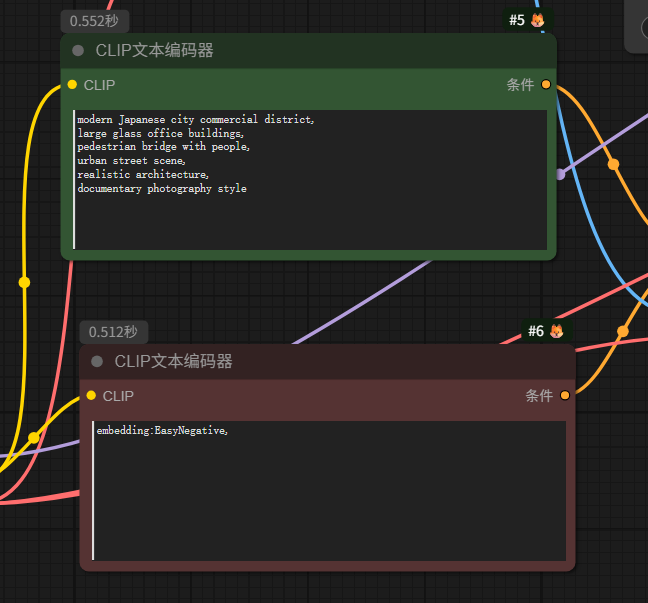
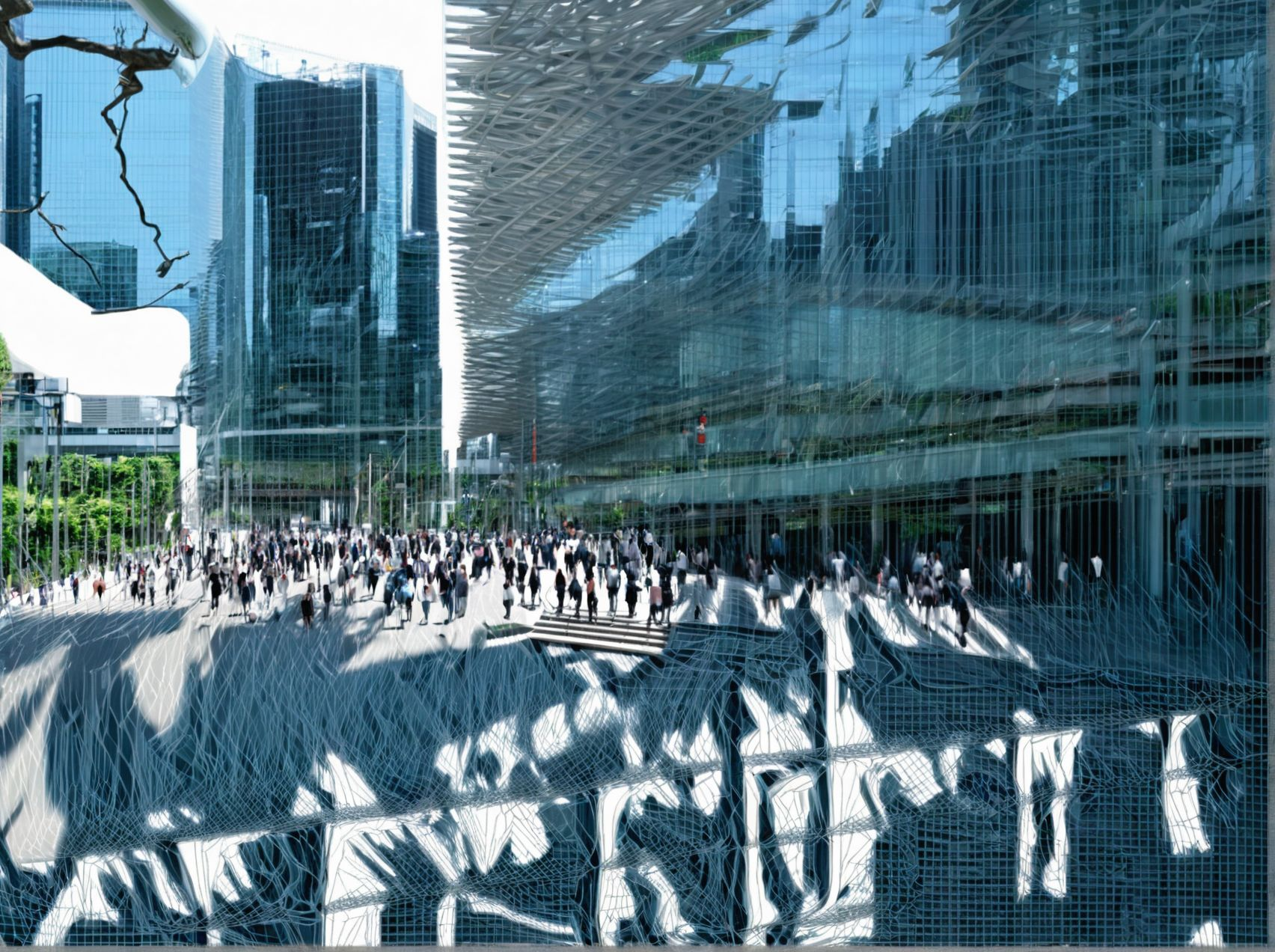
(3)生成图片
(1)原图片

(2)生成图片

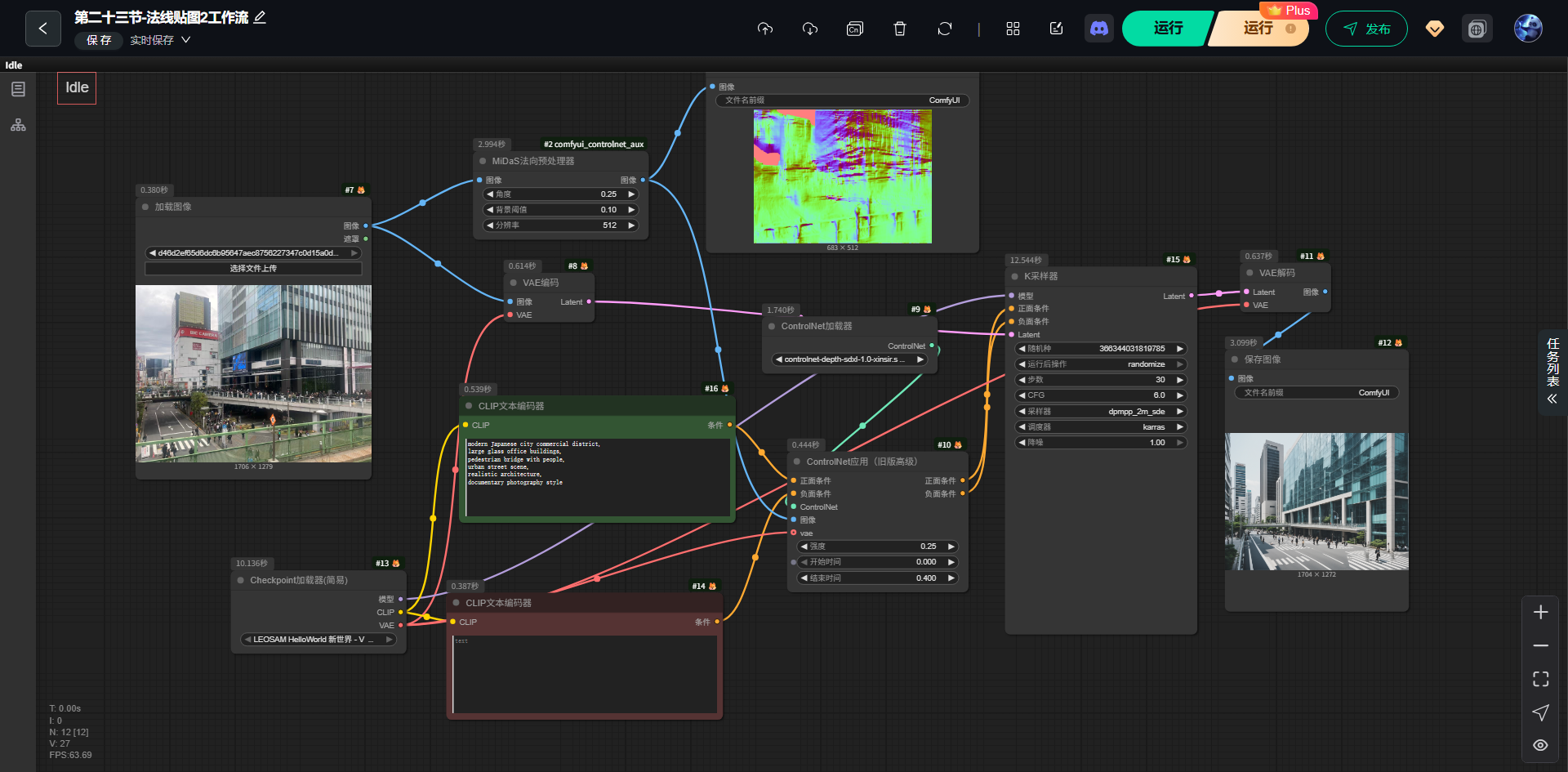
2-第二十三-法线贴图2工作流
这套工作流通过 MiDaS 提供弱法线方向提示、Depth ControlNet 锁定整体几何结构,并通过 ControlNet 的时间衰减机制,仅在采样早期约束模型,从而在保证城市空间结构一致性的同时,避免过度几何绑定,生成更自然、可用于工程场景的写实图像。
(1)调用模块
(2)输出 提示词
bash
modern Japanese city commercial district,
large glass office buildings,
pedestrian bridge with people,
urban street scene,
realistic architecture,
documentary photography style
(3)生成图片
(1)原图片

(2)生成图片

(4)结构说明
4,模块部分说明
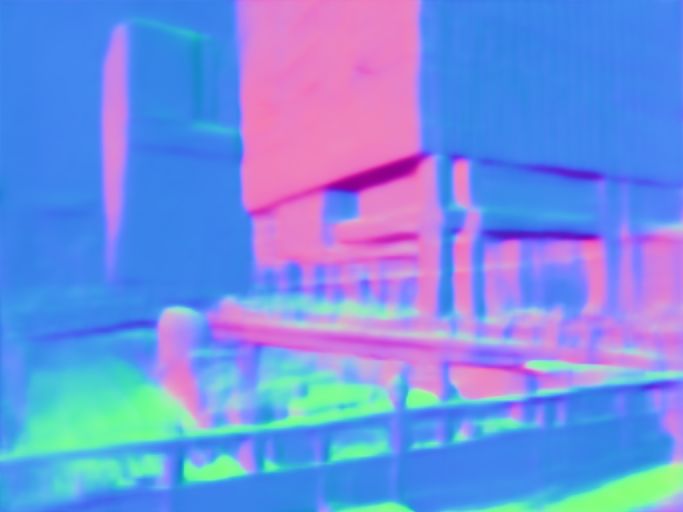
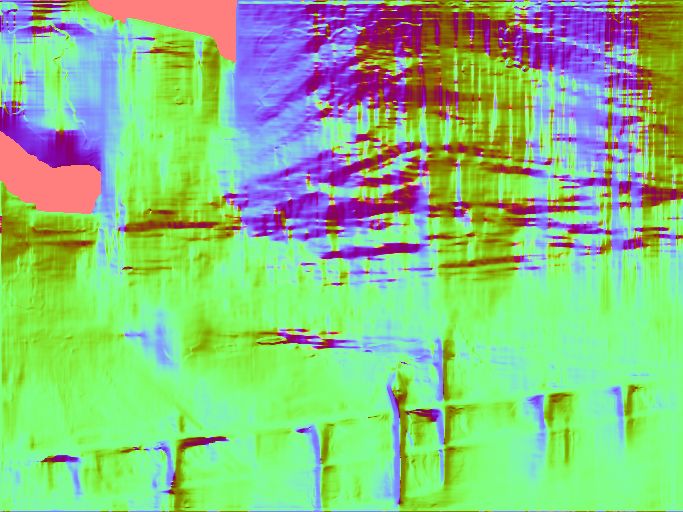
1 BAE 法线图预处理(comfyui_controlnet_aux)
这个节点在干嘛?
从原图估计"表面朝向",输出 RGB 法线图(紫蓝绿那张)。
注意一个关键点(很重要):
你这里的法线:
- ❌ 不是当"主约束"
- ✅ 只是作为弱几何提示
👉 它的作用是:
- 提醒模型哪里是立面
- 哪里是桥面
- 哪里是竖直结构
而不是:
- "你必须照着这条线画"
2 Depth ControlNet(真正的主约束)
节点
controlnet-depth-sdxl / sd1.5它负责什么?
锁定"前后关系 + 多层空间结构"
在这张图里:
- 建筑在后
- 高架桥在中
- 人群在前
OK 的输入图**,没有问题:
- 城市结构明确
- 前中后景清楚
- 建筑线条规则
2️⃣ MiDaS 法向预处理器(❗问题起点)
用的是:
MiDaS 法线 / 类法线预处理器
这个模块本质是:
❌ 不是"真实法线"
✅ 是 深度梯度 + 方向估计的伪法线
也就是说,它输出的这种 五颜六色的法线图:
- 对"自然物体"还行
- 对玻璃幕墙 + 城市规则结构 → 极容易产生高频噪声
现在看到的那张法线图里已经有:
- 横向拉丝
- 竖向抖动
- 深度跳变
5,细节部分
1,失败的设计
之前有很多失败的设计,这里只是学习 ,所以不会太深究这些
| 项目 | 之前失败 | 现在成功 |
|---|---|---|
| 几何数量 | 多且都强 | 主次分明 |
| 法线质量 | 碎、噪声大 | 城市立面规则 |
| Prompt | 弱 | 明确 |
| 模型 | 随意 | 城市友好 |
| 自由度 | 几乎没有 | 留了空间 |
这套工作流的"正确定位"
✅ 非常适合
- 城市合成数据
- 建筑结构保持生成
- 城市数字孪生前处理
- 论文 / 专利里的"结构约束生成模块"
❌ 不适合
- 情绪艺术
- 抽象风格
- 二次元插画
6,工作流链接
(1)
https://download.csdn.net/download/qq_22146161/92495037
(2)https://download.csdn.net/download/qq_22146161/92495041
7,总结
不断学习摸索中。