【多喝热水系列】从零开始的ROS2之旅------Day 1
一、开篇:ROS2 入门的起点
笔者在日常生活中愈发感觉具身智能的重要性,并且私下认为传统的计科方向,将变得越来越内卷。遂顺应时代的浪潮,就算是培养一下代码之外的兴趣了。
Day1 学习目标:
安装 ROS2、体验海龟模拟器、夯实 Linux 基础
前置环境说明: Ubuntu 系统版本: 22.04(双系统)
硬件基础:2T的移动硬盘
二、核心实操 1:Ubuntu 系统下 ROS2 安装全流程
基本上是按照鱼香大佬的一键安装来。
安装前准备:依赖包安装(sudo apt update )
ROS2 版本选择 Humble
详细安装步骤:
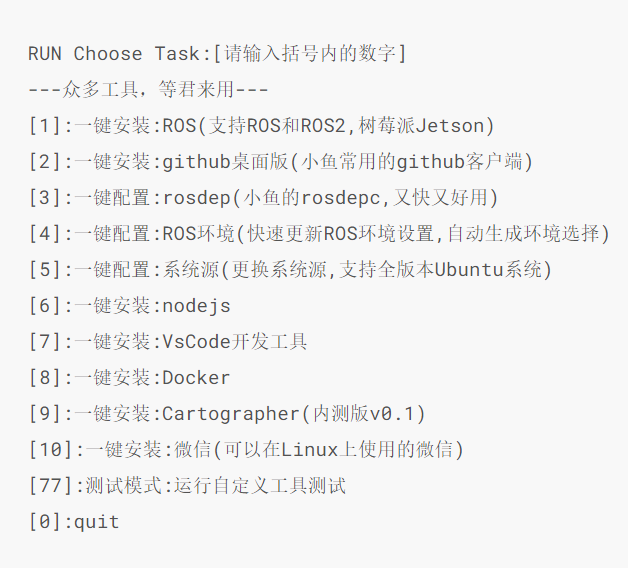
1、一键安装命令
wget http://fishros.com/install -O fishros && . fishros
里面鱼香大佬把一些基础的软件包都放在此链接,按需安装即可(按照鱼香佬书就行)
安装验证:ros2
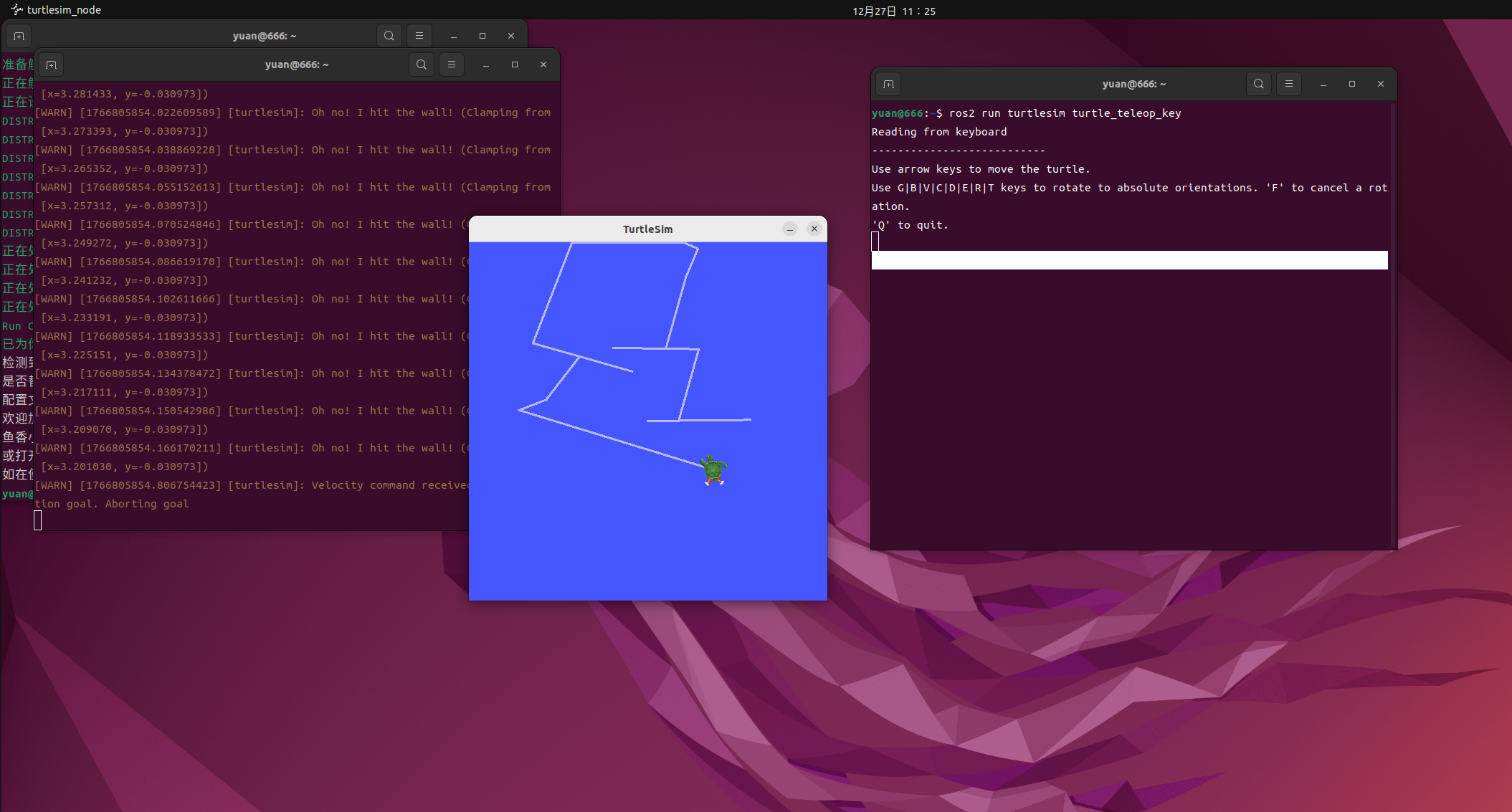
三、核心实操 2:运行第一个 ROS2 机器人 ------ 海龟模拟器
启动终端 1:启动海龟模拟器---输入命令:ros2 run turtlesim turtlesim_node
解释:即打开程序包的可执行文件。
启动终端 2:控制海龟移动(ros2 run turtlesim turtle_teleop_key)
解释:通过键盘来控制海龟移动。(注意需要点击一下你新Ctrl+alt+T的终端,不然不移动)
启动终端 3:rqt
实操体验:ROS2 多终端协同的初步认知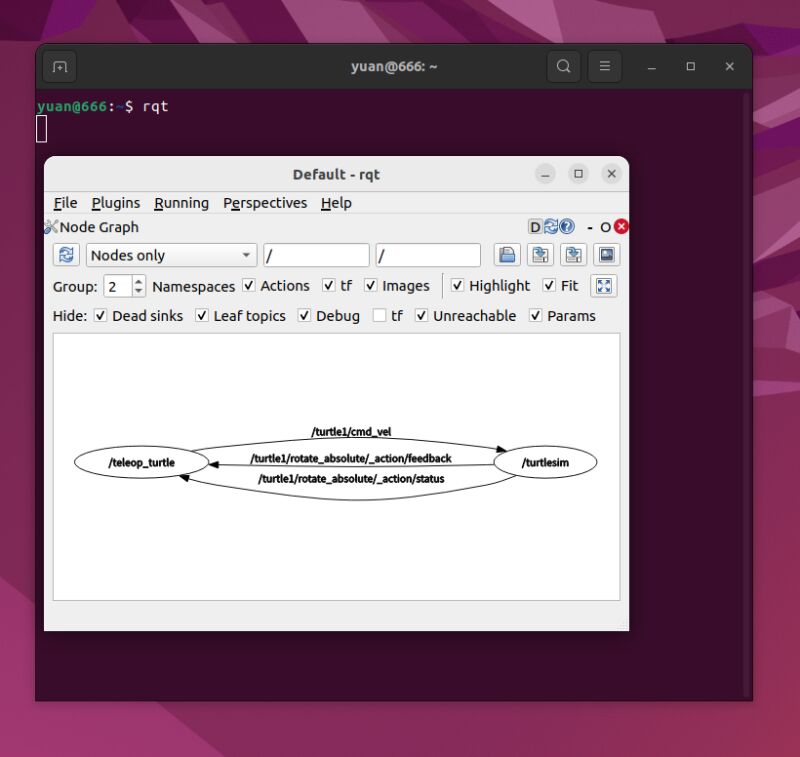
个人主观认为此通信协议为网络上的P2P通信方式。
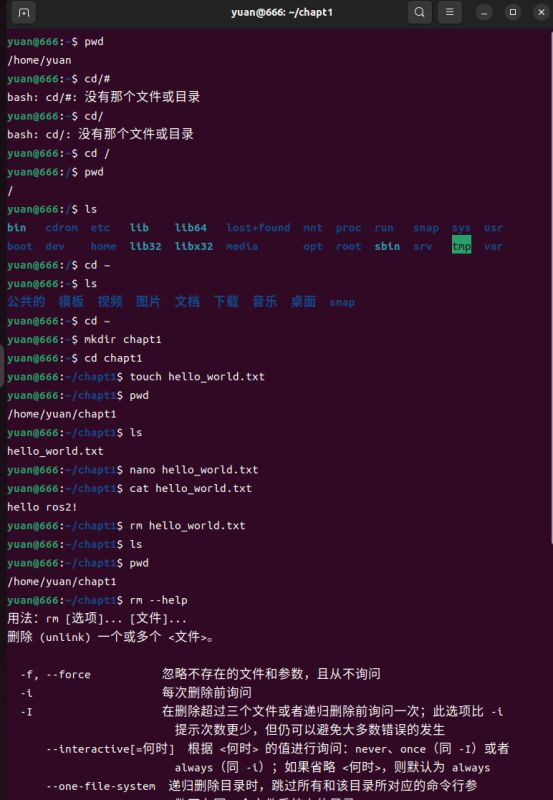
四、辅助技能:Linux 基础命令练习(ROS2 必备)
命令练习的必要性:ROS2 操作依赖 Linux 终端
重点练习的命令:
目录操作:cd(切换当前所在空间)、ls(当前文件夹下的目录项)、pwd( 查看当前工作空间)
文件操作:mkdir(创建文件夹)、touch(创建文件)、rm(删除)、cat(查看文件内容)、nano(写文件内容)、Ctrl+O(保存内容)、Ctrl+X(退出文件)
权限操作:sudo(执行高权限命令)
五、Day1 学习总结与后续规划
核心收获:掌握 ROS2 安装流程、成功运行首个模拟器、熟悉基础 Linux 命令