第一步、安装 WSL
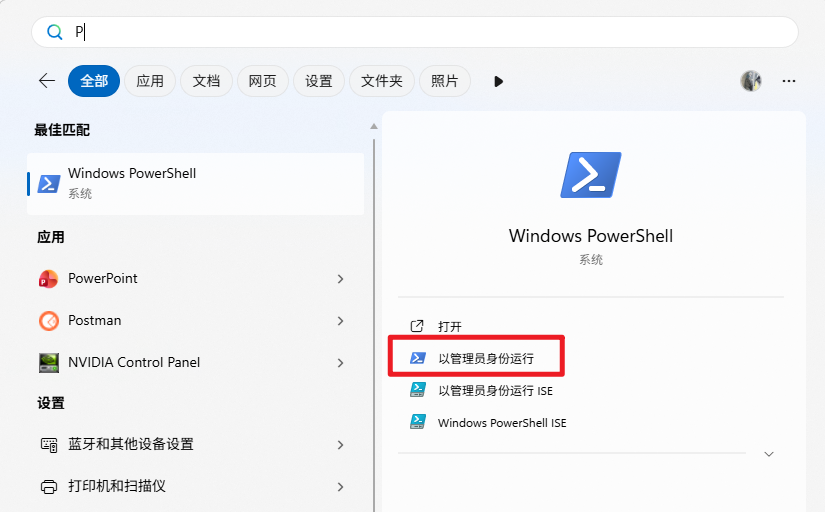
以管理员身份打开 PowerShell
PS C:\WINDOWS\system32> wsl --install第二步、重启电脑
第三步、安装 Ubuntu 22.04
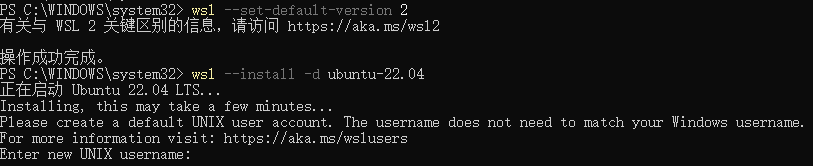
PS C:\WINDOWS\system32> wsl --set-default-version 2
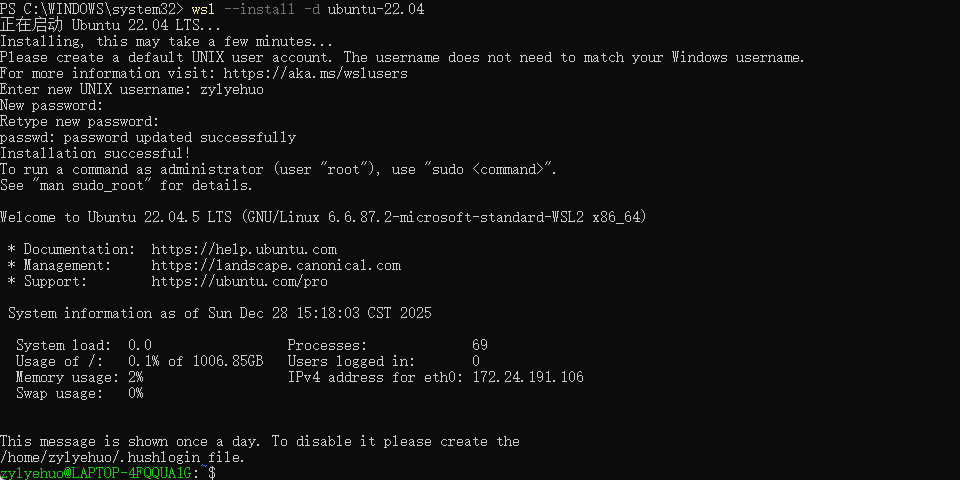
PS C:\WINDOWS\system32> wsl --install -d ubuntu-22.04第四步、输入用户名
第五步、输入密码

第六步、安装 ROS2
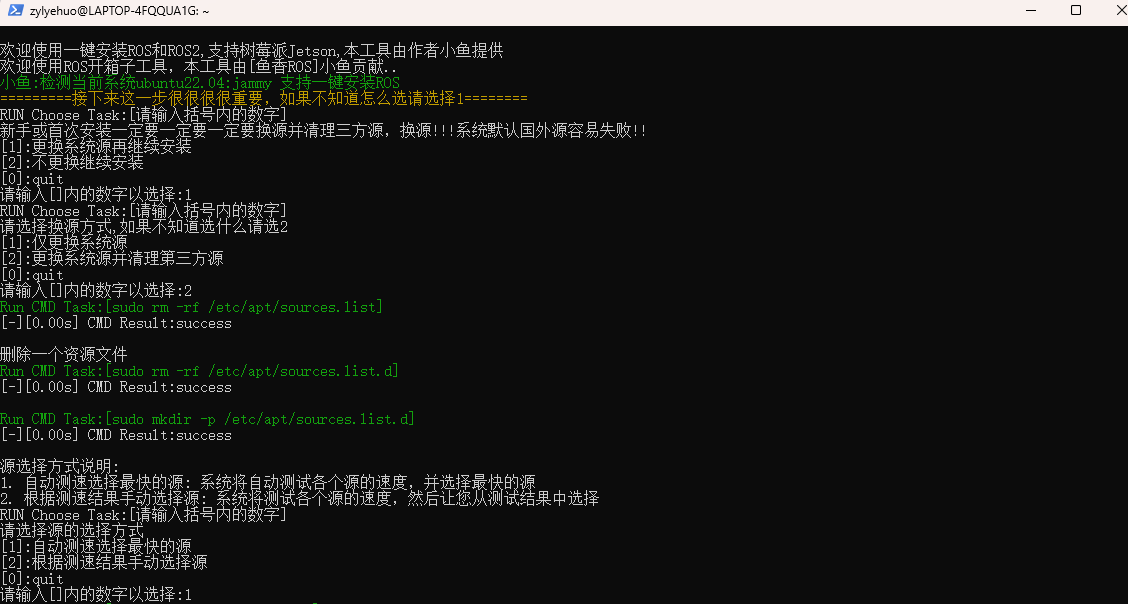
zylyehuo@LAPTOP-4FQQUA1G:~$ wget http://fishros.com/install -O fishros && bash fishros选择 1
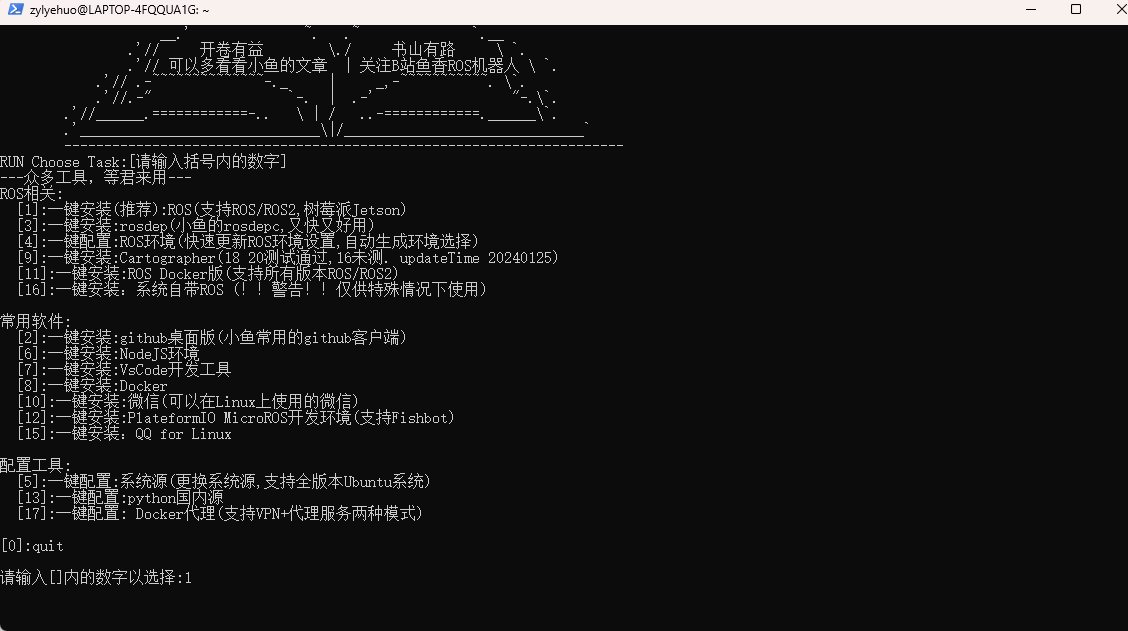
选择 1
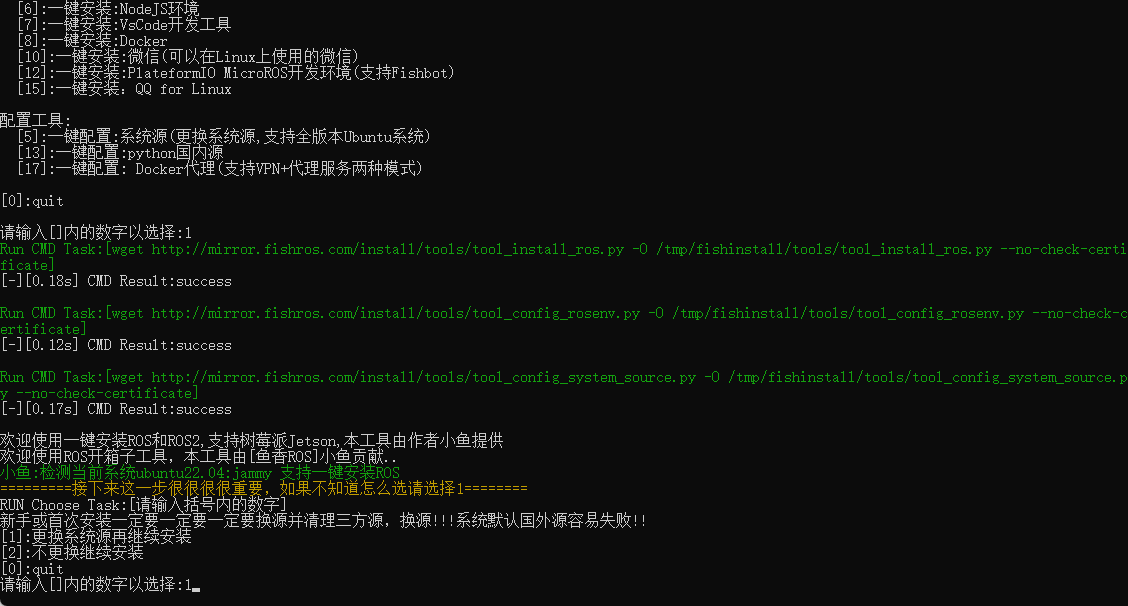
选择 2
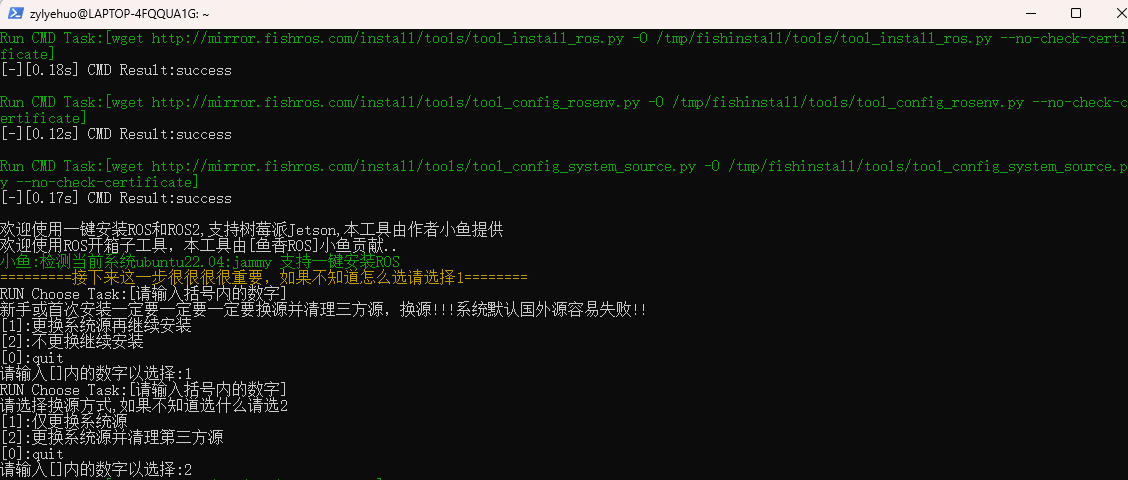
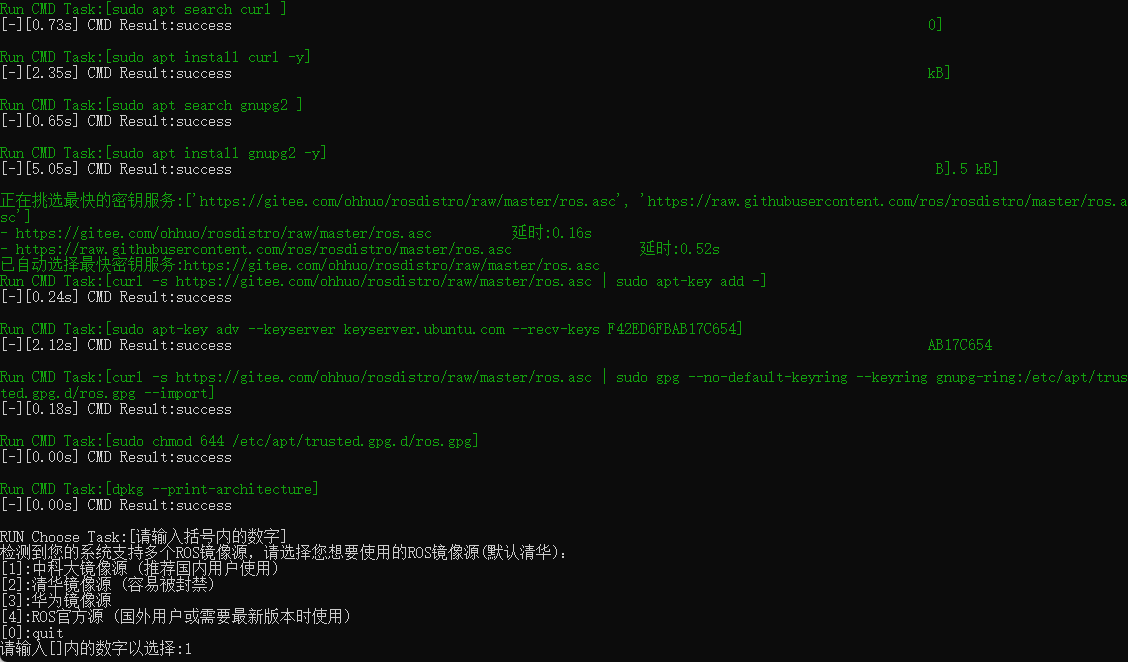
选择 1
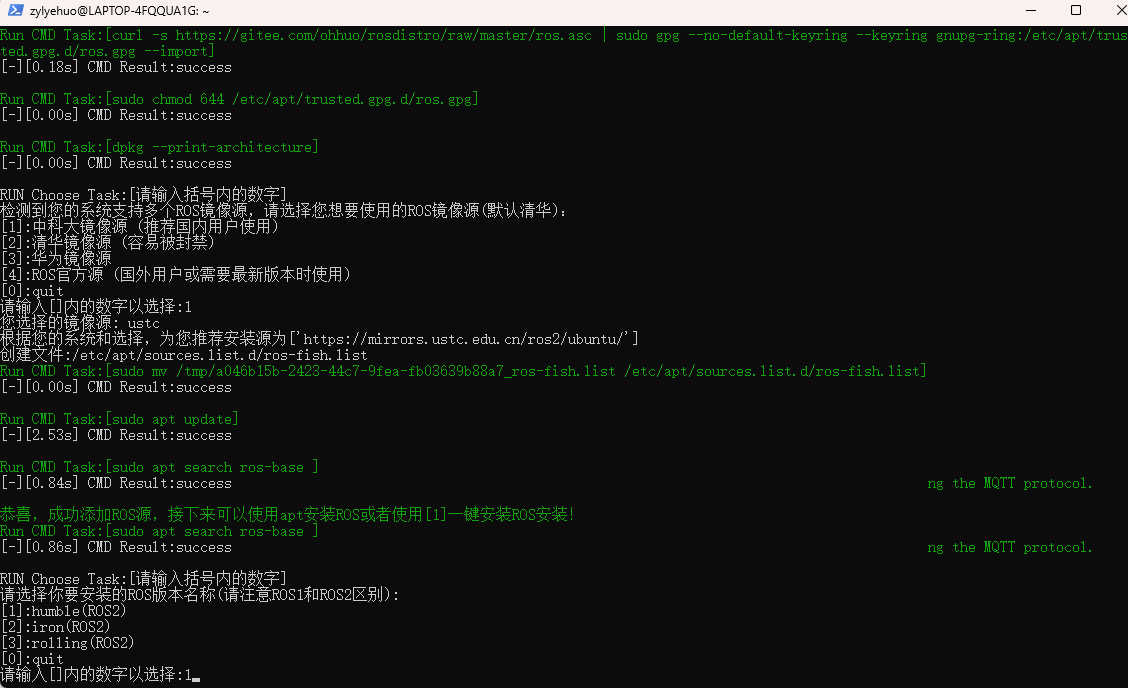
选择 1
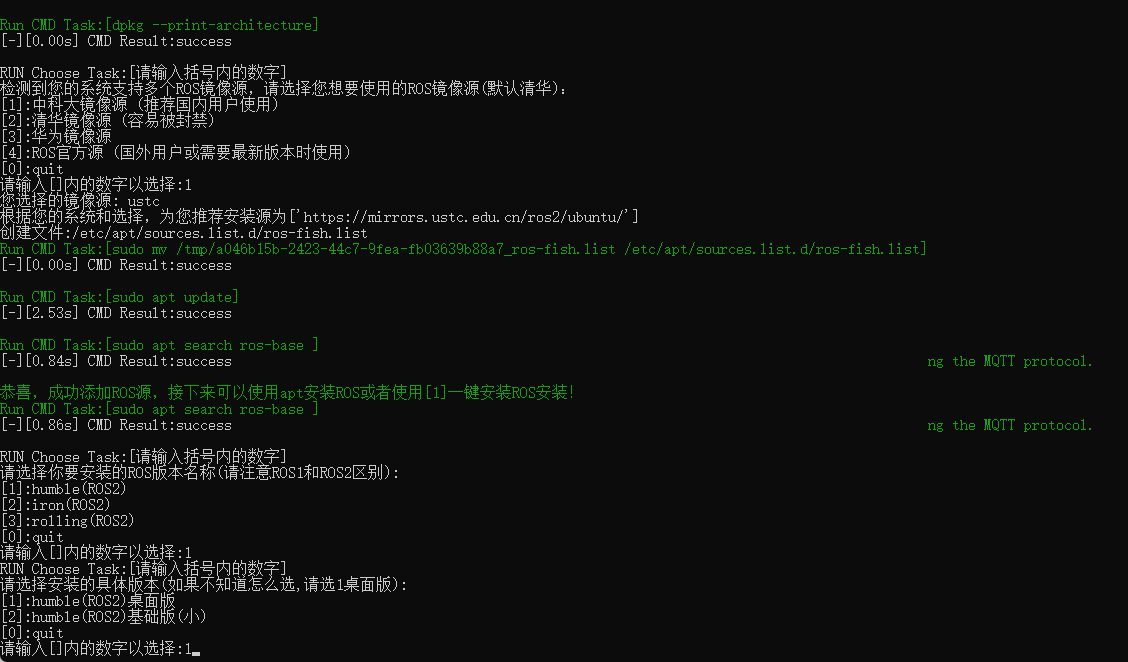
选择 1
选择 1
第七步、更新环境目录
zylyehuo@LAPTOP-4FQQUA1G:~$ source ~/.bashrc第八步、测试是否安装成功
zylyehuo@LAPTOP-4FQQUA1G:~$ ros2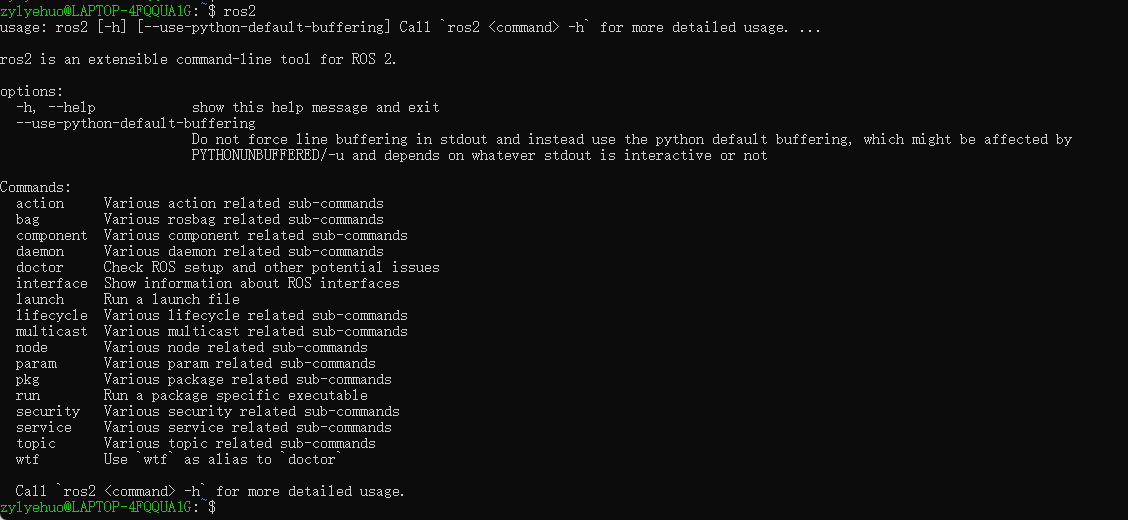
第九步、运行小海龟例程
zylyehuo@LAPTOP-4FQQUA1G:~$ ros2 run turtlesim turtlesim_node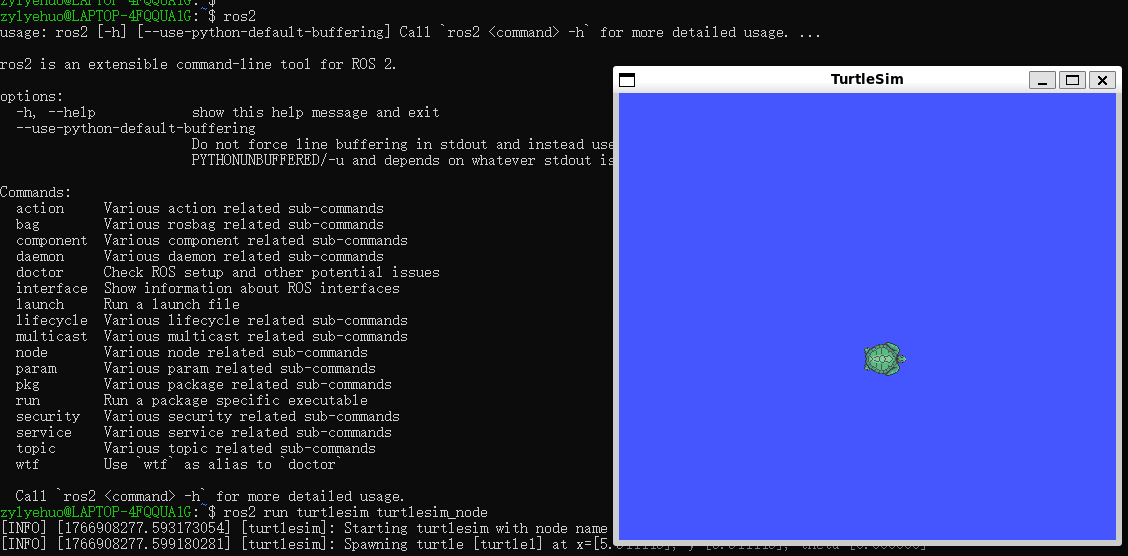
# 新开一个终端(PowerShell)
zylyehuo@LAPTOP-4FQQUA1G:~$ wsl
zylyehuo@LAPTOP-4FQQUA1G:~$ ros2 run turtlesim turtle_teleop_key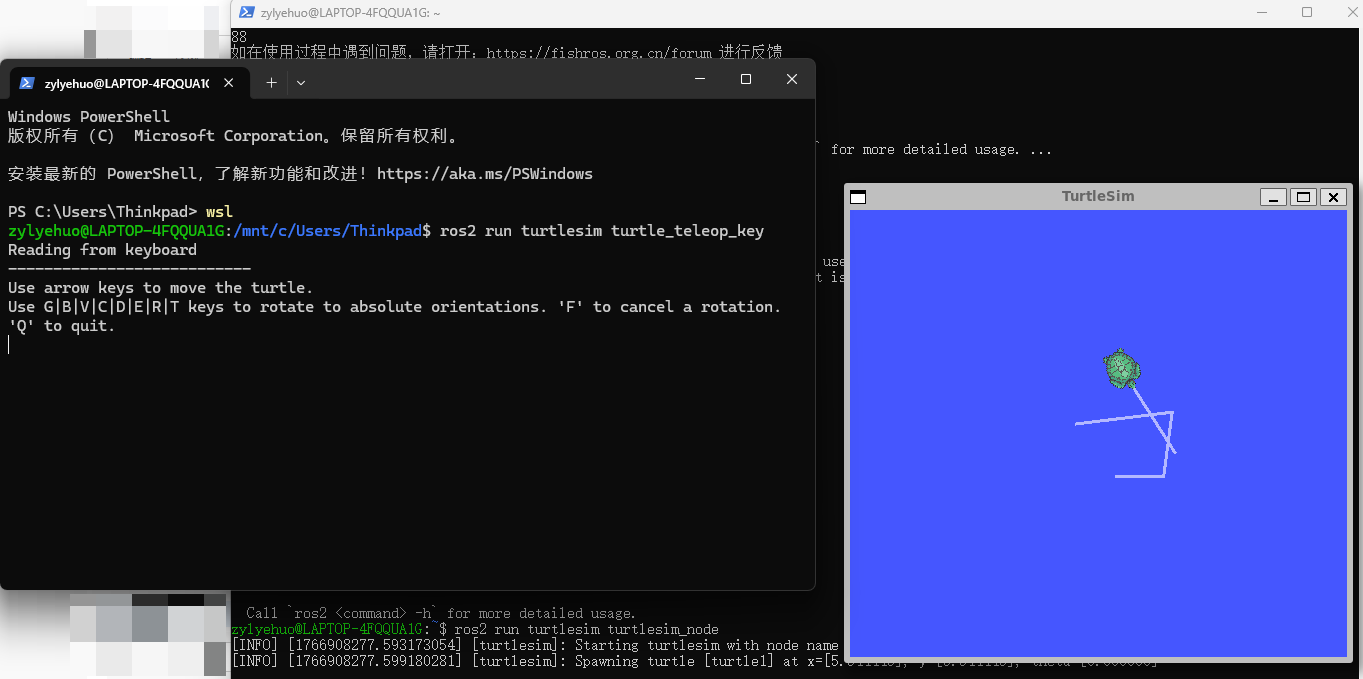
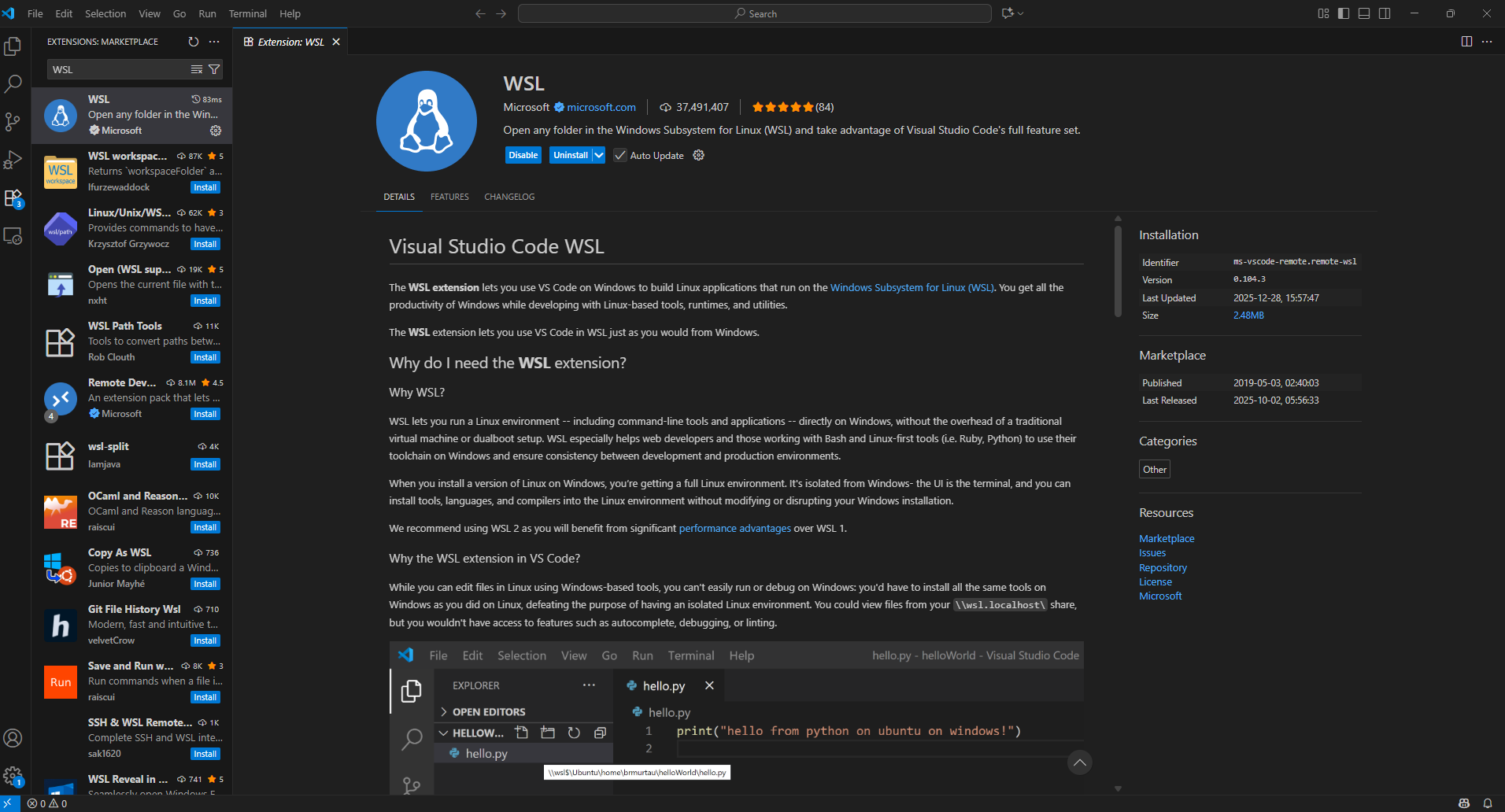
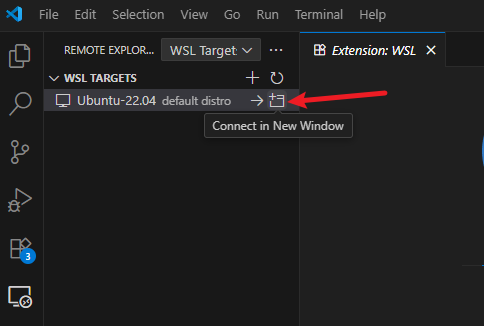
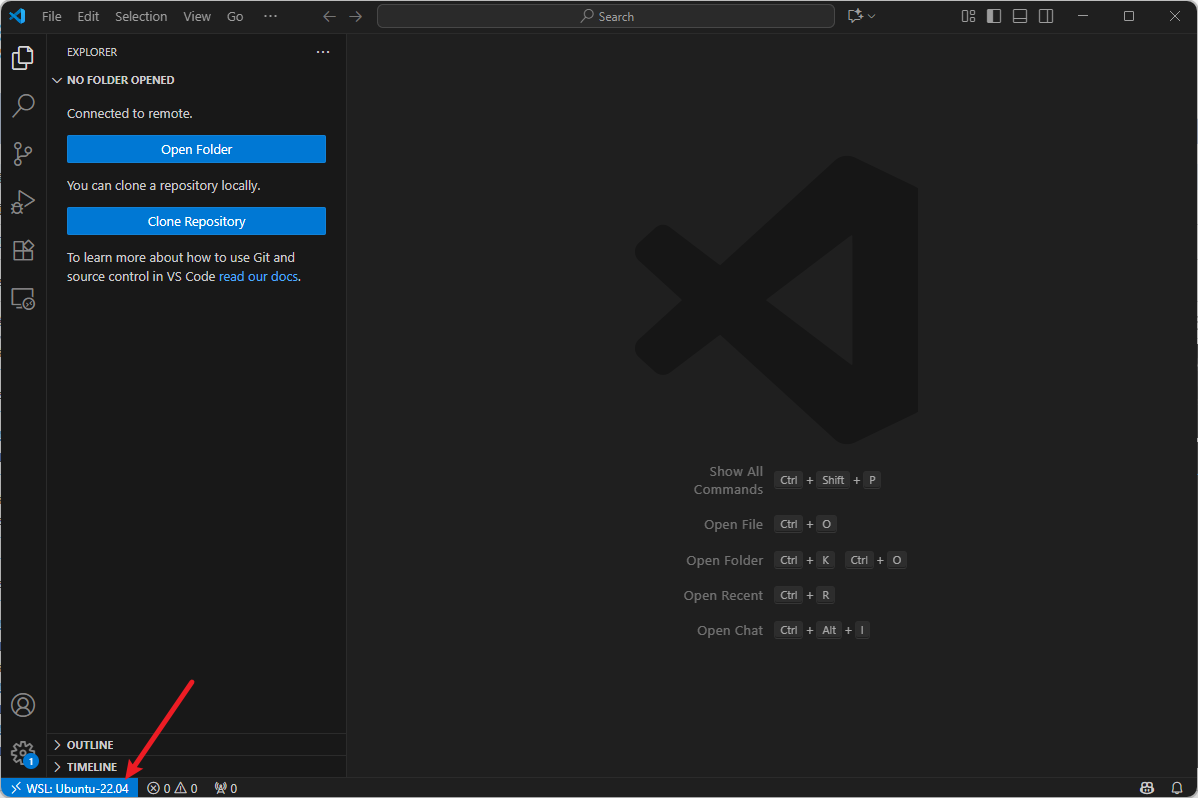
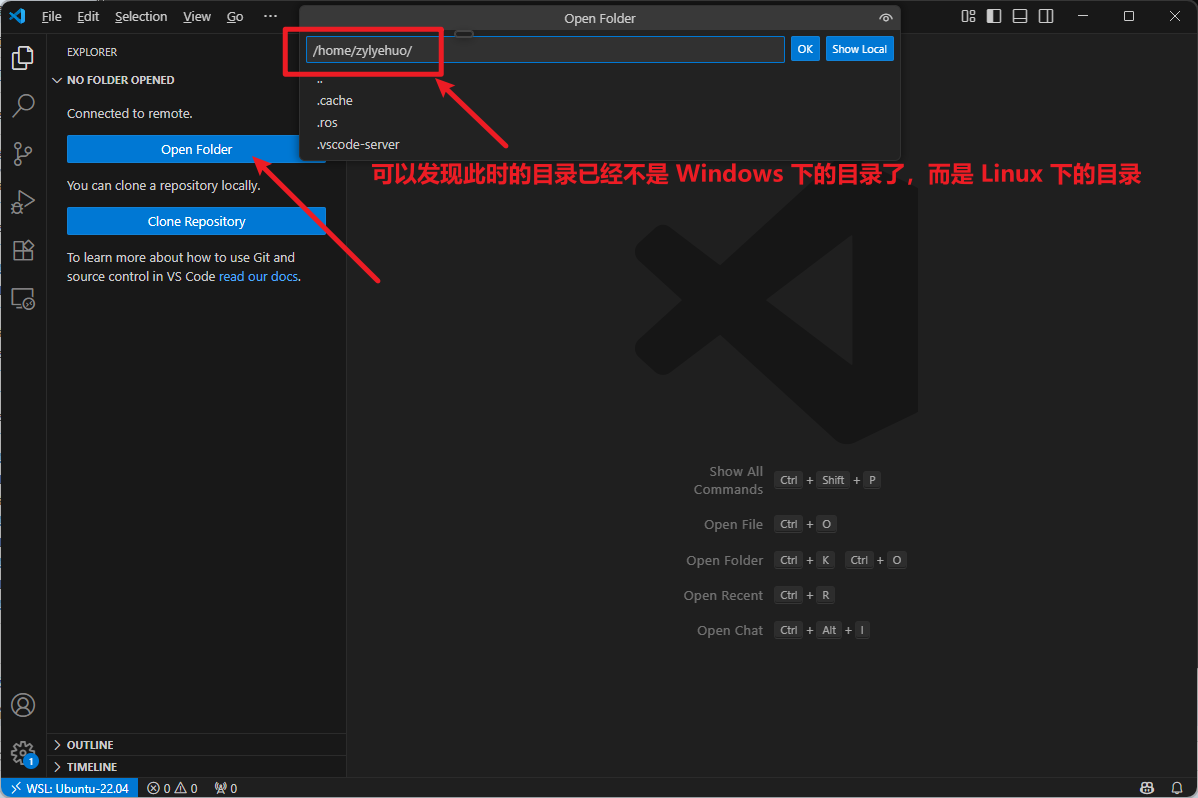
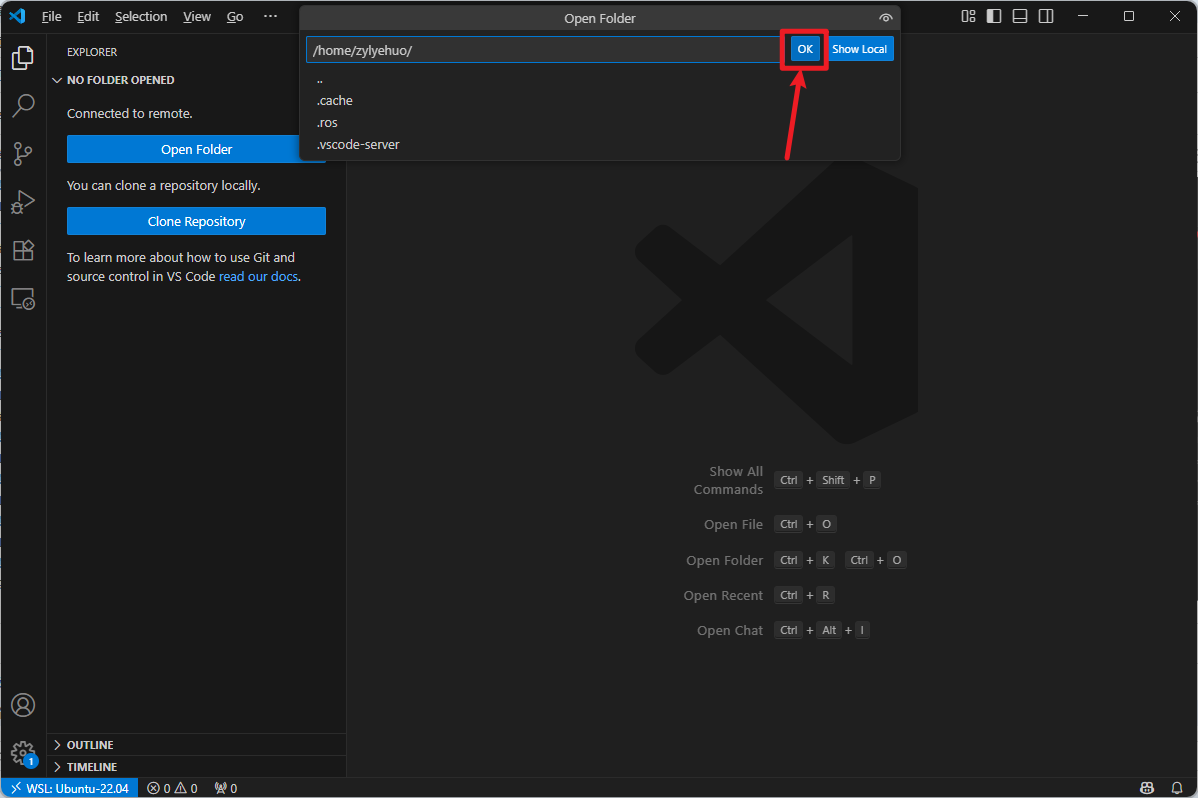
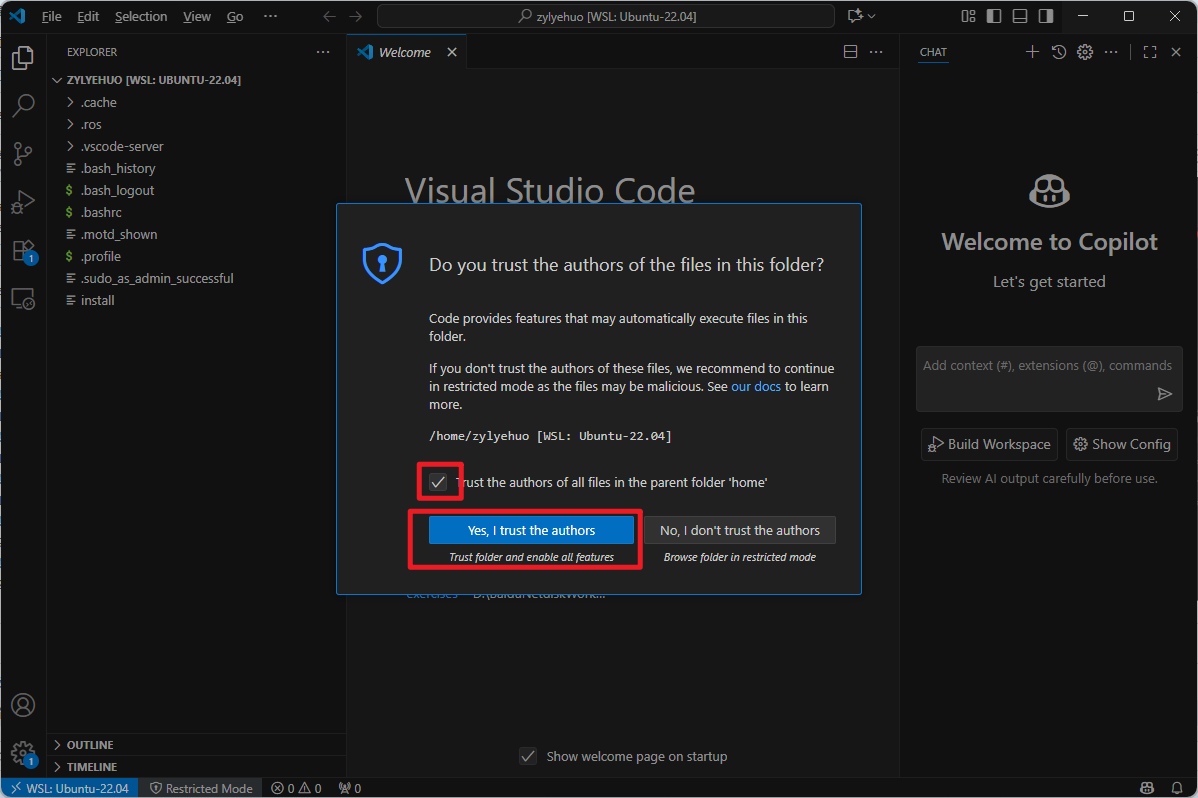
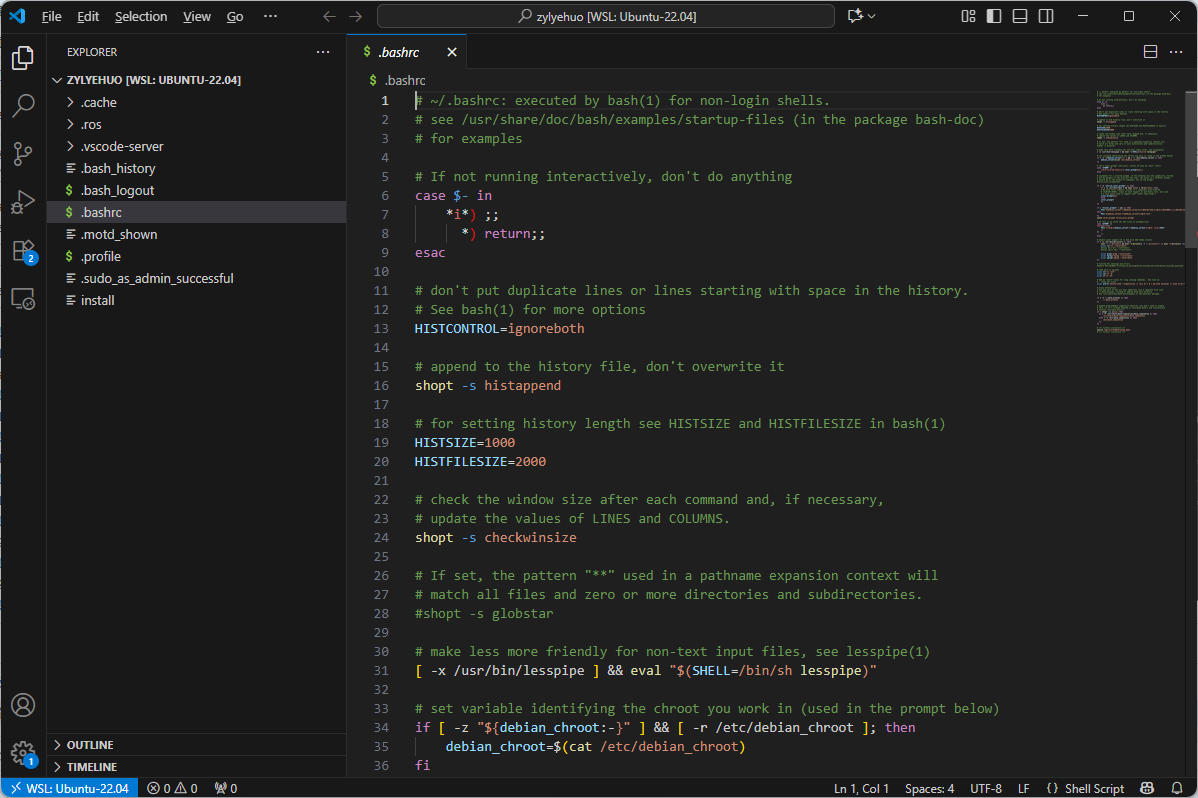
第十步、在 VSCode 中安装 WSL 插件
VSCode 仅作为编辑器
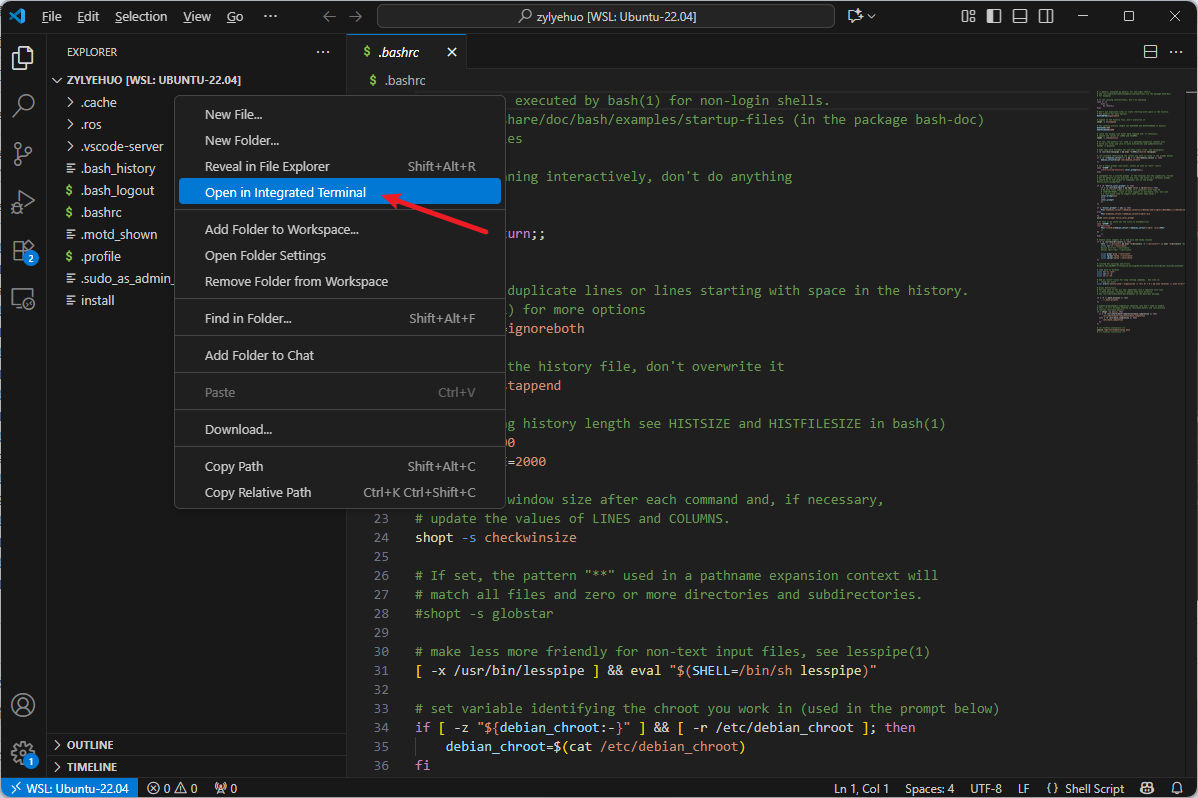

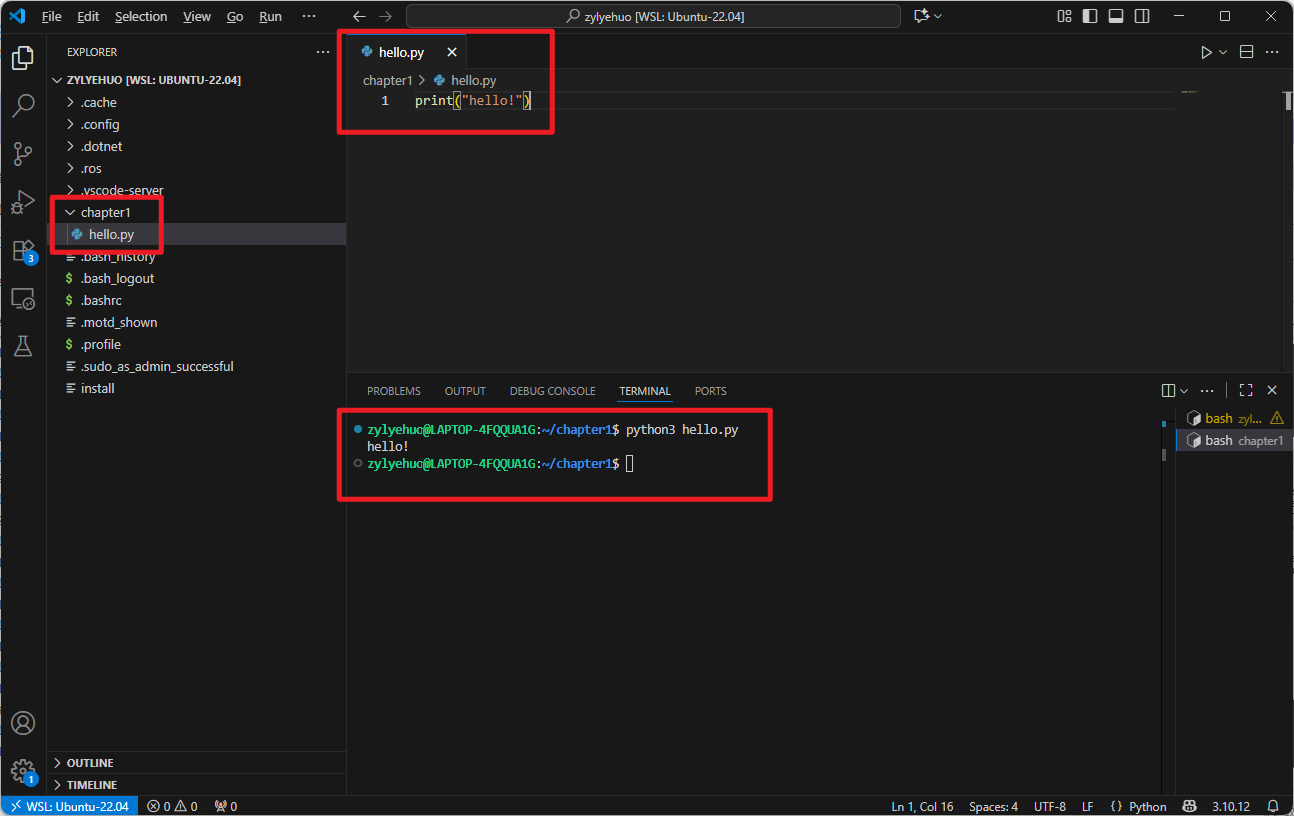
第十一步、编程 Python 文件进行测试
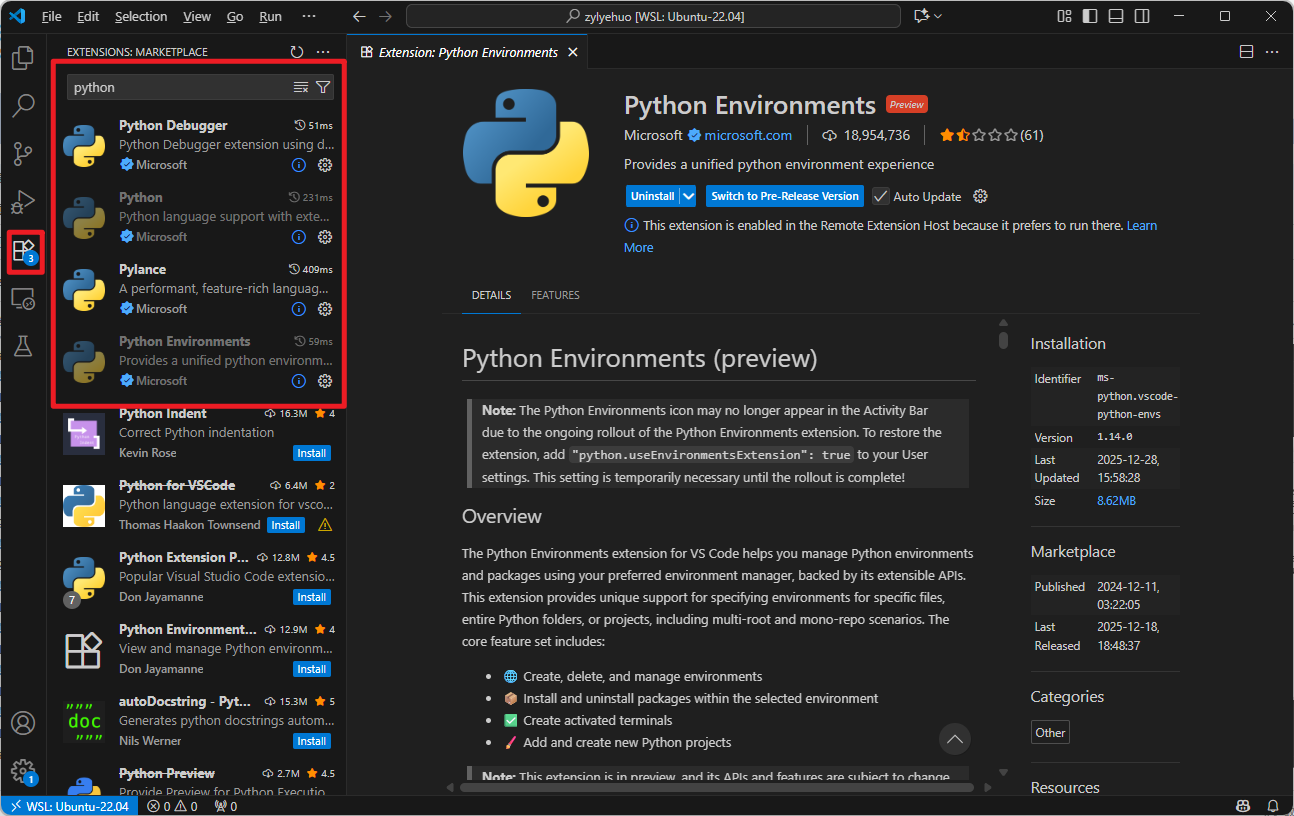
(1)不指定使用 python3
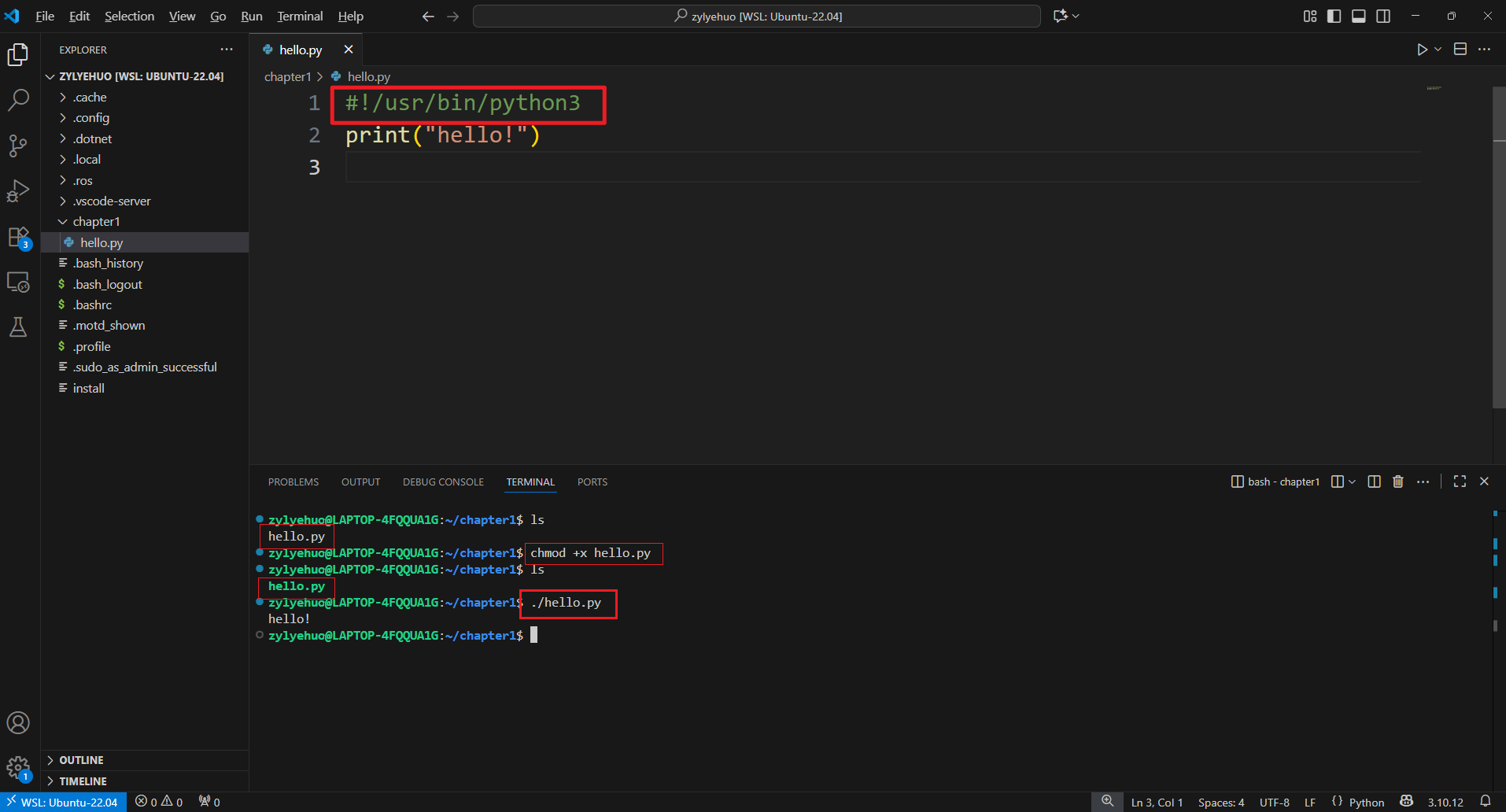
(2)指定使用 python3
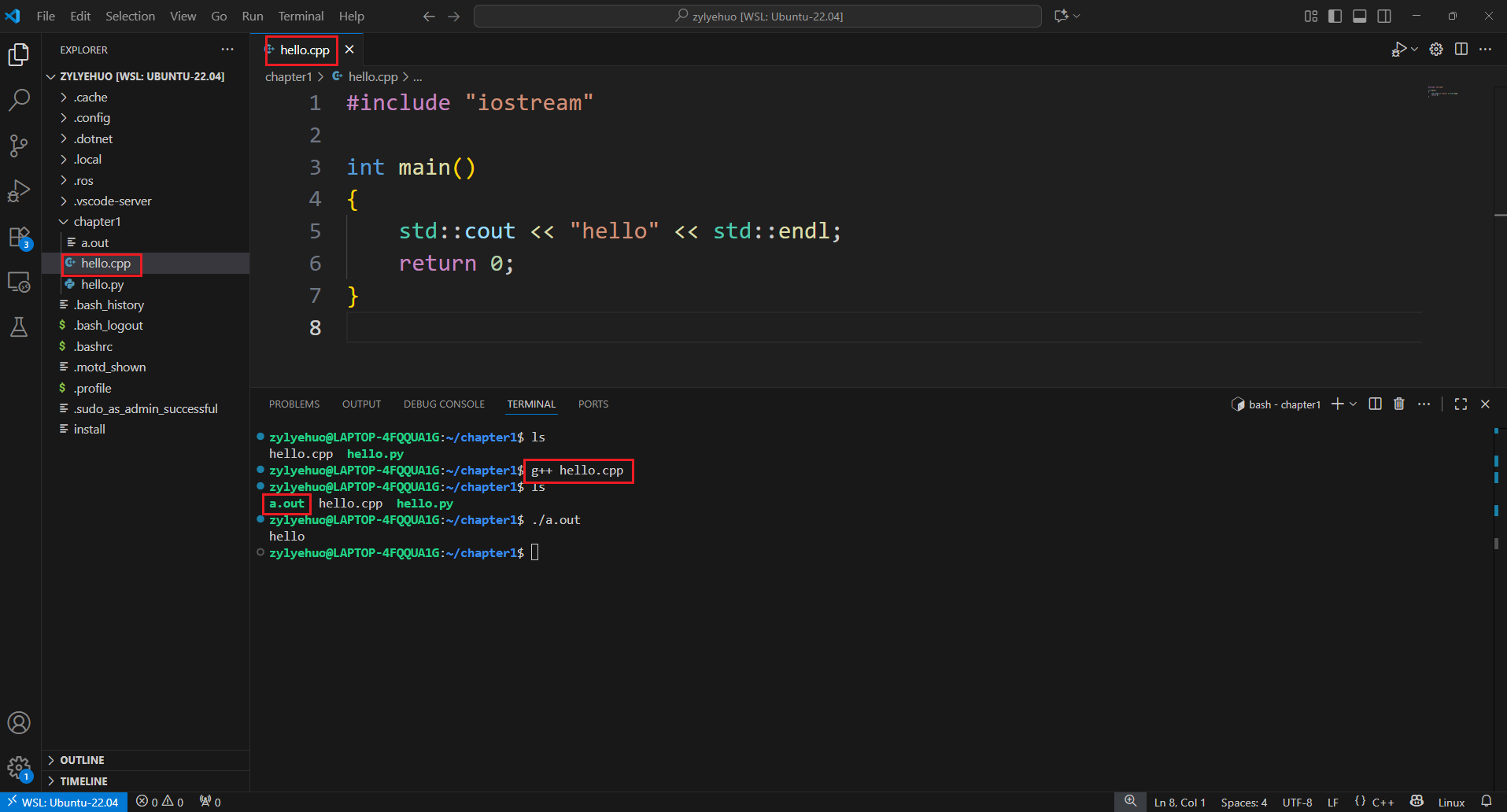
第十二步、编程 C++ 文件进行测试