1 AI Agent是什么
AI Agent 全称 Artificial Intelligence Agent ,即人工智能智能体 ,是一种能够自主感知环境、做出决策、执行动作,并持续与环境和其他主体交互的智能系统。
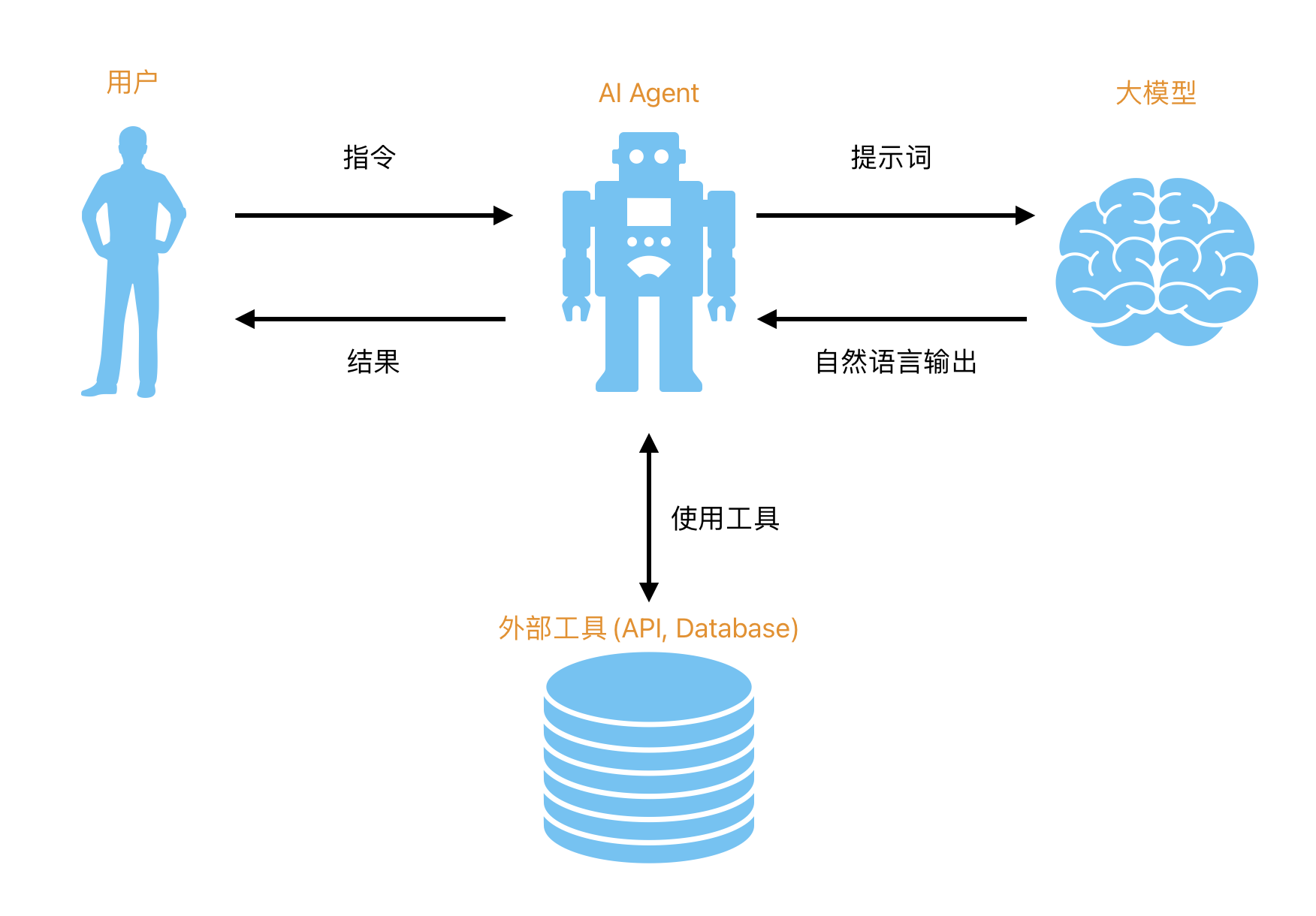
简单来说,AI Agent 不是一个单一的算法模型,而是一套具备 "感知 - 决策 - 执行 - 反馈" 闭环能力 的智能体,核心特点是自主性、交互性、适应性。
汽车领域,AI Agent 通常以 "多 智能体 协同" 的形式存在。从近两年开始,AI Agent 在汽车上正从单点功能升级为全链路场景化智能中枢。覆盖智能座舱、自动驾驶、车联网服务与车辆运维四大领域,通过多模态感知、意图理解与跨系统协同,显著提升驾驶安全、交互效率与用车体验。
2 汽车上的核心应用领域
2.1 智能座舱
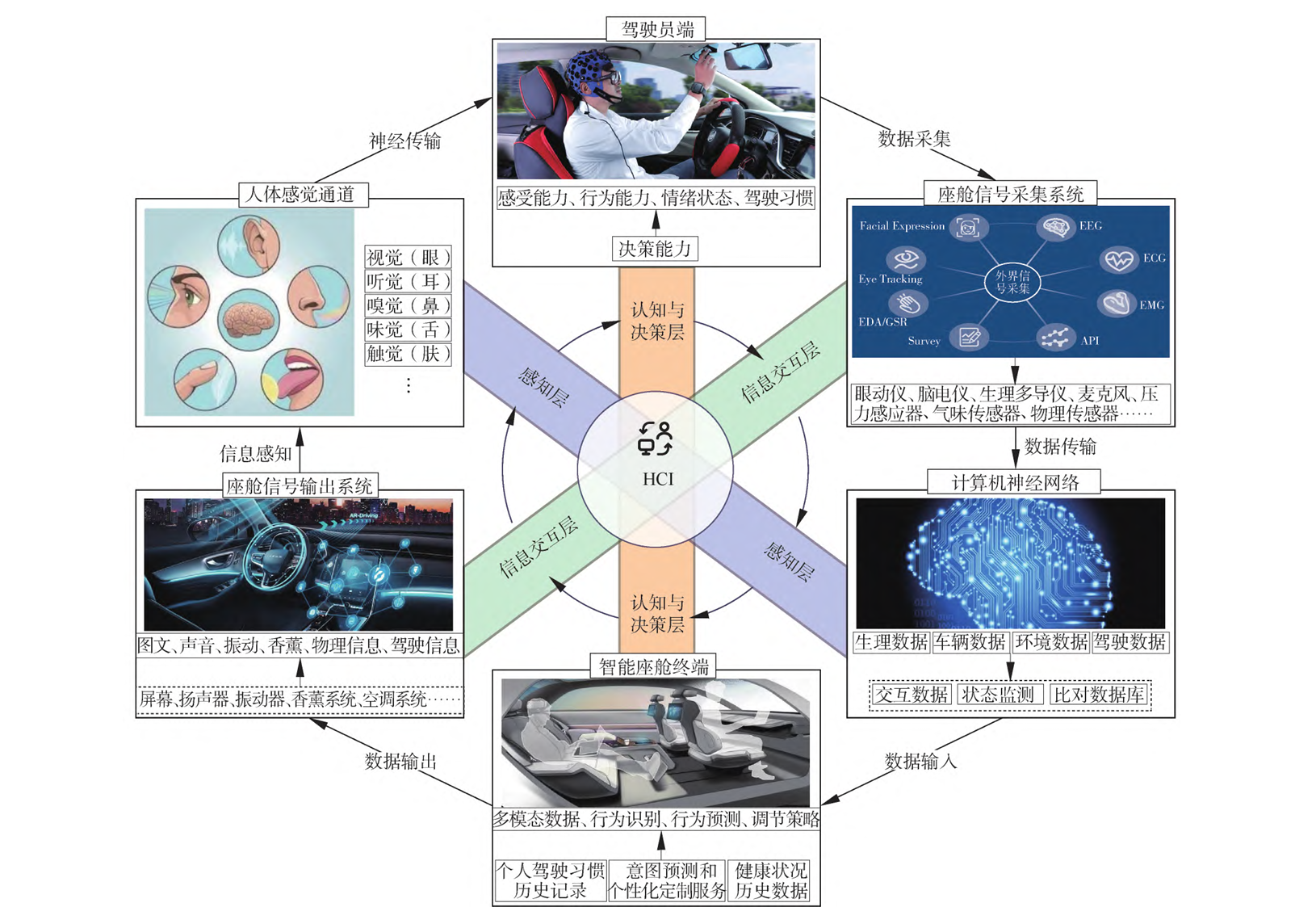
智能座舱多模态交互 AI Agent 是以端侧大模型为核心,融合语音、视觉、触觉、生物识别等多通道数据,具备 "感知 - 理解 - 决策 - 执行 - 反馈" 闭环能力的智能体,能主动理解用户模糊意图并跨模态协同提供场景化服务,是座舱从被动响应迈向主动智能的核心载体。
2.1.1 核心模块
|---------|--------------------------------|--------------------------------|-----------------------|
| 层级 | 核心组件 | 功能说明 | 技术要点 |
| 感知层 | 麦克风阵列、DMS/OMS摄像头、力反馈传感器、生物识别模块 | 采集语音指令、人脸/手势/情绪、触控压力等多源数据 | 端侧实时处理,延迟<200ms,抗干扰算法 |
| 理解层 | 多模态大模型(如文心、通义千问)、意图推理引擎、记忆模块 | 融合解析语义、视觉信息,理解上下文与用户习惯 | 模型蒸馏压缩、联邦学习保障隐私 |
| 决策层 | 多Agent协同调度器、场景规则引擎 | 拆解复杂需求,分配任务至各功能Agent(导航/支付/娱乐) | A2A协议标准化接口,动态优先级调度 |
| 执行层 | 车载ECU、生态API(支付宝/高德)、硬件控制接口 | 执行空调/座椅调节、服务下单、导航规划等操作 | 硬件抽象层,跨域服务原子化调用 |
2.1.2 交互种类介绍
智能座舱多模态交互AI Agent的核心优势在于突破单一交互模态的局限性,实现语音、视觉、触觉、生物识别等多模态的深度融合与协同交互,构建更贴近人类本能、更符合直觉的超自然交互(Natural UI)模式,大幅提升驾驶场景下的交互安全性与便捷性。
语音交互是当前最核心的交互模态,依托端侧ASR(自动语音识别)、TTS(语音合成)与多轮对话技术,实现免唤醒指令响应、方言识别与情感化回复等高级功能。端侧ASR技术的识别准确率已提升至98%以上,能够有效应对高速行驶、空调开启等嘈杂环境下的语音识别需求;TTS技术则支持情感化语音合成,可根据场景氛围与用户情绪调整语音的"喜怒哀乐",增强交互的拟人化体验。

多轮对话能力则允许用户在不重复唤醒的情况下完成连续指令输入,例如用户先说出"去公司",后续补充"走最快的路线",系统可自动关联上下文完成路线调整,无需重新触发唤醒指令。
视觉交互作为语音交互的重要补充,通过3D手势识别、眼动追踪、DMS等技术拓展交互边界,实现"无接触"的精准控制。3D手势识别技术可识别抬手、挥手、握拳等常见手势,支持切歌、静音、调节音量等功能的手势触发;眼动追踪技术则通过捕捉用户视线焦点,实现"视线选屏"的交互模式,减少驾驶过程中的触控操作;

DMS系统则实时监测驾驶员的眨眼频率、头部姿态等特征,当检测到驾驶员频繁眨眼或打哈欠等疲劳信号时,自动触发提神机制------推送轻柔音乐、调低空调温度或开启香氛,保障驾驶安全。部分高阶方案还具备场景化视觉感知能力,例如感知到孩子入睡后主动调低音量,发现交警贴条时及时提醒车主,体现出场景化的主动关怀。
触觉交互聚焦于"盲操作反馈"与"安全预警"两大核心需求,通过力反馈方向盘、座椅震动、压感屏等硬件载体传递交互信息。在导航场景中,当车辆即将转弯时,力反馈方向盘会通过单侧震动向驾驶员传递转向提醒,配合语音播报实现"听觉+触觉"的双重预警,提升导航指令的感知效率;压感屏则通过不同强度的触觉反馈区分不同操作的触发状态,帮助用户在不注视屏幕的情况下完成盲操作,减少驾驶分心。
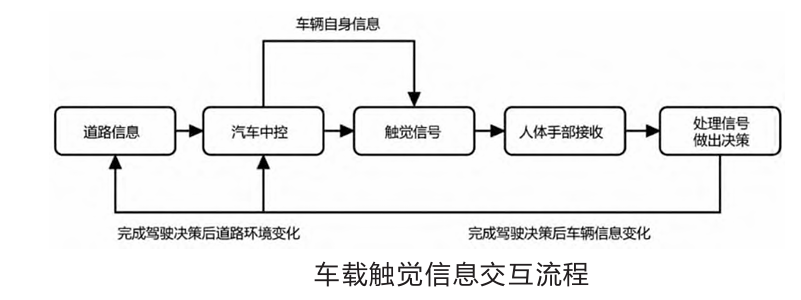
座椅震动功能则可与ADAS(高级驾驶辅助系统)联动,当检测到车道偏离或前方碰撞风险时,通过座椅特定区域的震动向驾驶员发出预警,提升安全提醒的有效性。
生物识别交互则聚焦于身份认证与个性化服务触发,核心技术包括面部识别、掌静脉识别与心率监测等。

面部识别技术可实现驾驶员身份的自动认证,认证通过后自动调整座椅位置、后视镜角度、空调温度等个性化设置,并推送常用路线;掌静脉识别则凭借更高的安全性,用于支付验证、车辆解锁等敏感操作;心率监测技术则通过采集驾驶员心率数据,评估其身体状态,在长途驾驶中若检测到心率异常,主动推荐休息区并规划停靠路线。
多模态融合交互是该Agent的高阶能力,通过跨模态对齐算法与场景化决策引擎,实现多通道数据的协同分析与联合响应,破解单一模态交互的局限性。

例如用户说"打开天窗"的同时做出抬手动作,系统通过"语音+视觉"的双模态验证快速响应,避免误触发;当用户说出"我冷"时,系统通过"语音指令+环境温度数据"的融合分析,同步执行空调升温、座椅加热操作,并通过语音完成结果反馈;在"下班买咖啡"的场景中,系统则整合语音下单、导航规划、免密支付等多环节能力,实现从指令输入到服务完成的全链路闭环,无需用户多轮操作。
2.1.3 与传统交互系统的差异

2.2 智能驾驶
随着人工智能技术的迭代升级,AI Agent(智能体)凭借其自主性、适应性、交互性与学习性的核心特征,已成为智能驾驶系统从"规则驱动"向"数据驱动"转型的核心支撑。
作为连接车辆硬件与驾驶任务的"大脑",AI Agent贯穿智能驾驶"感知-决策-执行"全链路,推动驾驶自动化水平从L2级辅助驾驶向L4级高阶自动驾驶加速演进,同时在提升行车安全、优化交通效率、降低商业化落地成本等方面展现出关键价值。
2.2.1 技术架构
智能驾驶系统由感知层、决策层、执行层构成,AI Agent的核心价值在于主导决策层与感知层的协同运作,并赋能执行层实现精准控制,同时承担多车、车路协同的交互决策任务。
与传统规则驱动的驾驶系统相比,AI Agent通过海量数据学习与实时环境交互,可动态适配复杂动态场景(如极端天气、突发障碍物、无保护左转等),大幅提升系统的场景泛化能力。其核心定位可概括为三大角色:
传统智能驾驶系统采用"感知-定位-预测-决策-规划-控制"的串行模块化架构,存在数据流转损耗、场景泛化能力受限等固有缺陷。AI Agent通过构建"环境感知-智能决策-执行反馈-持续学习"的闭环智能体架构,实现了从"规则驱动"向"数据驱动+模型驱动"融合范式的转型。其核心架构可拆解为四大功能模块,各模块通过车云一体算力架构实现高效协同:
多模态感知融合模块
作为AI Agent的"感知器官",该模块通过摄像头、激光雷达、毫米波雷达等多源传感器数据的时空同步与特征融合,构建高精度环境认知模型。
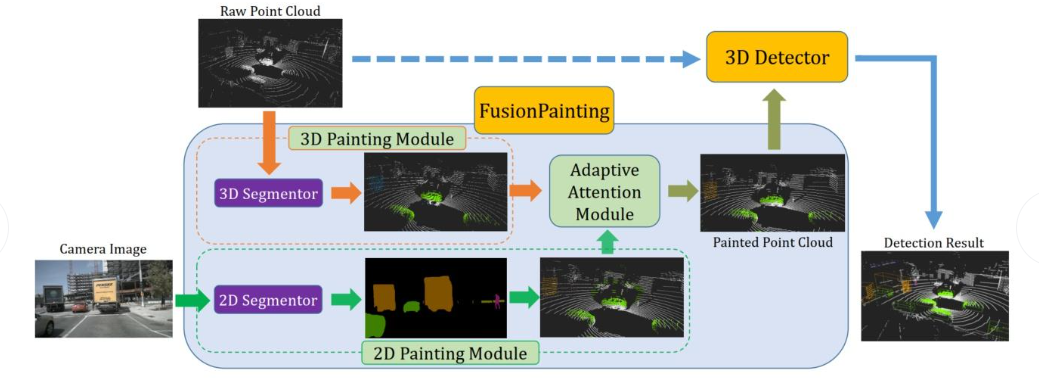
区别于传统融合方案,AI Agent引入Transformer-based多模态融合架构,实现对动态目标(车辆、行人、非机动车)状态估计、静态障碍物(护栏、施工区域)语义分割及极端天气(暴雨、浓雾)下的鲁棒感知。依托Waymo发布的WOD-E2E长尾场景数据集,该模块可针对发生率低于0.003%的罕见场景(如马拉松赛事期间的施工区域通行、 scooter骑行者摔倒避让)进行专项训练,显著提升感知系统的长尾场景覆盖能力。
端到端决策规划模块
此为AI Agent的核心"决策中枢",通过强化学习(RL)、生成式人工智能(AIGC)与世界模型(World Model)的协同,实现从传感器输入到驾驶动作输出的端到端映射。
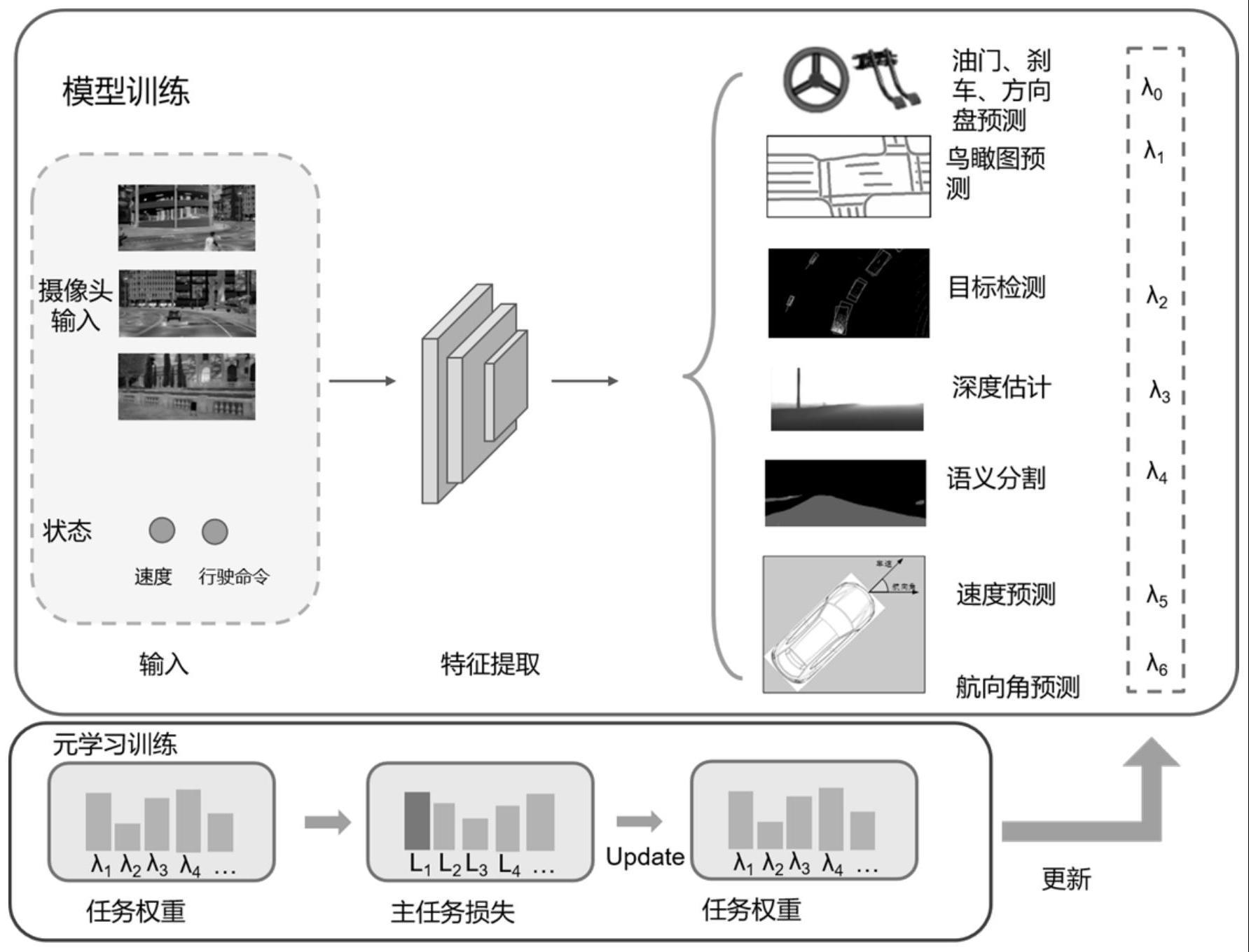
核心优势在于规避传统模块化架构中的误差累积,通过多阶段强化学习策略(模仿学习冷启动→世界模型交互训练→车端模型蒸馏)降低高质量数据依赖门槛。例如商汤绝影R-UniAD技术路线,通过该策略使端到端自动驾驶的数据需求降低一个数量级,同时实现超越人类驾驶的决策性能上限。
协同执行控制模块
承担AI Agent决策指令的精准转化功能,通过模型预测控制(MPC)与线控底盘的深度耦合,实现转向、制动、驱动系统的毫秒级响应。该模块引入数字孪生技术,将车端执行机构状态实时反馈至决策层,形成"决策-执行-反馈"的闭环优化;同时通过OTA技术实现控制策略的持续迭代,保障不同工况下的控制精度与乘坐舒适性。
2.2.2 案例分析
| 维度 | Waymo | 商汤绝影 | 特斯拉 |
|---|---|---|---|
| 核心技术方案 | 基于WOD-E2E数据集的端到端驾驶挑战,通过Rater Feedback Metric与ADE评估模型性能 | R-UniAD端到端路线(模仿学习冷启动-世界模型强化训练-车端蒸馏部署),世界模型协同交互 | FSD V12纯视觉端到端架构,多模态感知与决策端到端融合 |
| 关键数据/进展 | 长尾场景接管率较传统方案降低40% | 2025年底完成量产交付,4月上海车展展示实车部署效果;依托商汤大装置实现算力支撑 | 七百万辆量产车真实路测数据、超10万P算力支撑,误判率降至0.01%以下 |
| 应用场景/落地情况 | Robotaxi车队在亚利桑那州落地,聚焦复杂长尾场景的技术验证 | 量产车型落地,实现云端大模型高效训练与车端小模型轻量化部署 | 规模化应用于量产车型,可处理复杂城市道路、极端天气等多元场景 |
2.2.3 发展趋势
基于5G-A与车路云一体化架构,实现多AI Agent的实时交互与全局交通优化,2030年全球车路协同市场规模预计突破1万亿元,大幅提升高密度交通场景的通行效率;
算力与模型的协同优化:专用芯片算力密度持续提升,结合稀疏计算、混合精度训练等技术,实现AI Agent模型的轻量化与高效化,降低车端部署成本
2.3车联网
2.3.1 核心架构及概念介绍
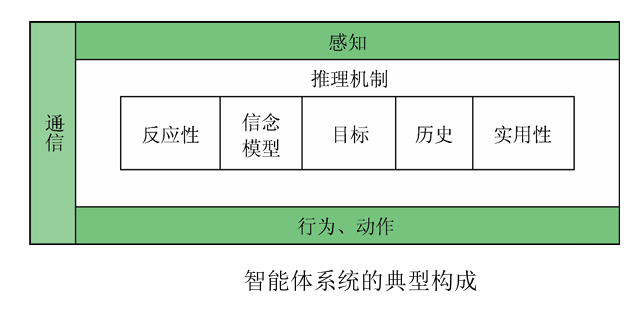
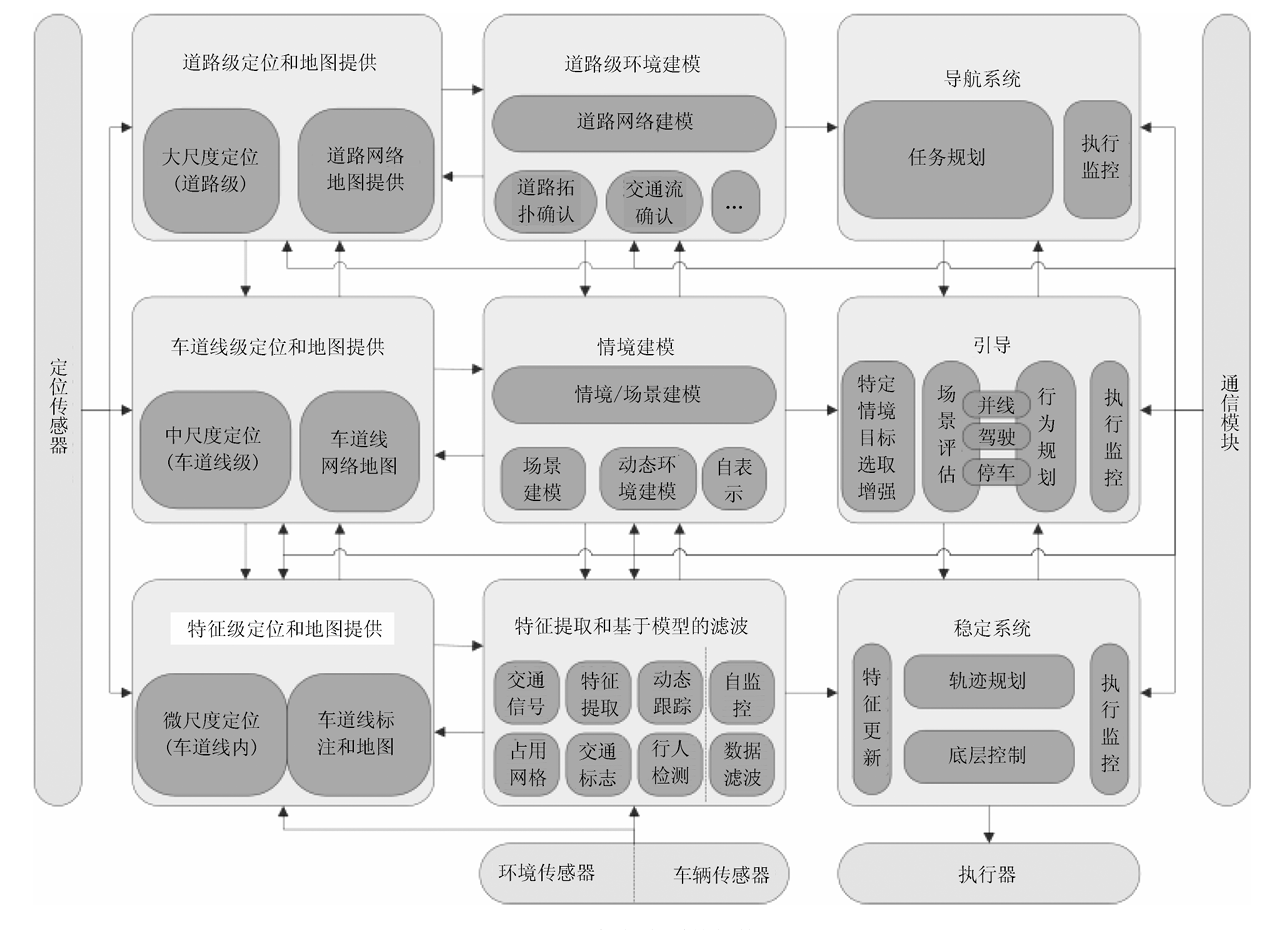
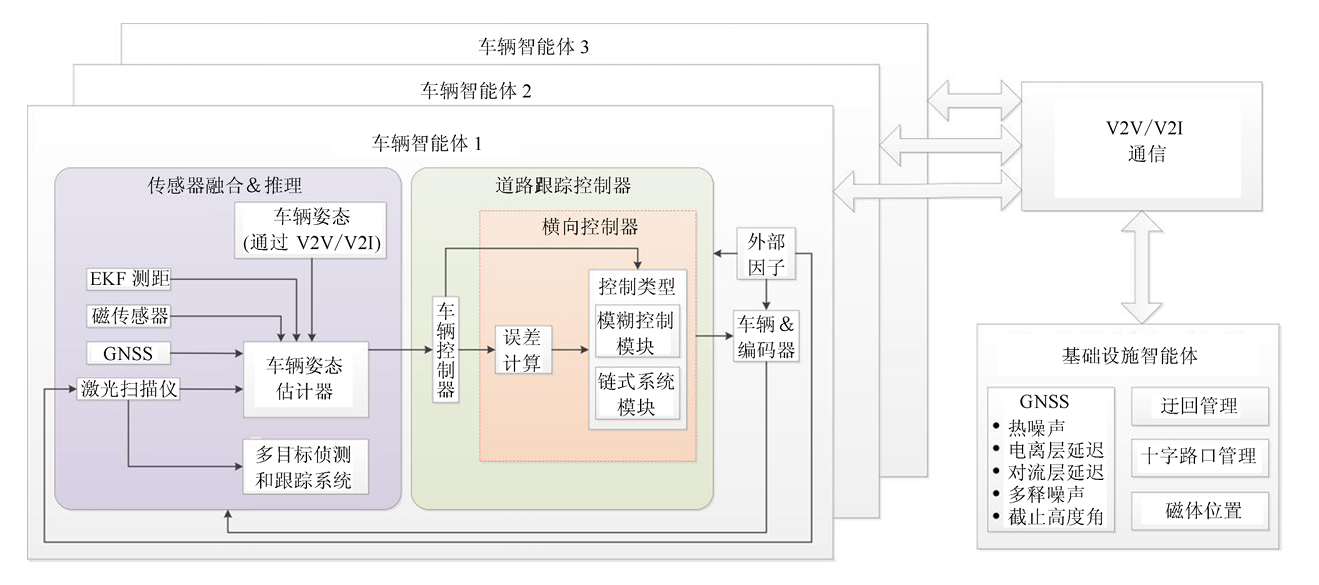
当前的智能车研究主要集中于单车系统在感知、规划和决策等模块的研究,车辆各自执行自己的 检测、避障、识别标志等任务,每台车采集到的数据 相互之间也是不共享的,这就要求单车本身各功能 模块非常可靠.而智能网联汽车的诞生将极大提高 单车效率.智能网联汽车是指搭载先进的车载传感 器、控制器、执行器等装置,并融合现代通信与网络 技术,实现人--车--路--云端等信息交换、共享,具备 复杂环境感知、智能决策、协同控制等功能的新一 代汽车,典型架构如图所示.
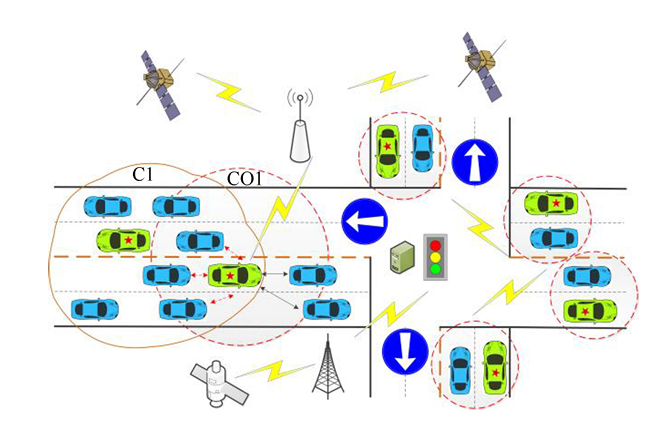
在一般的网联智能汽车研究中,智能汽车Agent 主要利用自身的感知模块对环境信息进行感知,V2X 模块则用于与周围可通信设备交互,获取额外的信 息.这种模式对于智能汽车Agent的要求较高.DE 等提出一种基于Agent的学习框架,以路边的基础设 施为主体,对道路环境进行监控,基于交通环境为进 入该区域的智能汽车Agent做最合理的规划. 网联 智能车被建模成理性智能体,基于(VehicletoInfras tructure, V2I) 的通信架构利用深度模仿学习实现道 路基础设施主导的策略学习.可动态决策的Agent的 运动被仿真为在有恒定速度障碍物环境下的走迷宫, 配合车间多传感器信息融合,如图所示,利用强化学习为智能汽车Agent的具体行为作决策
2.3.2 汽车换道时的Agent应用示例
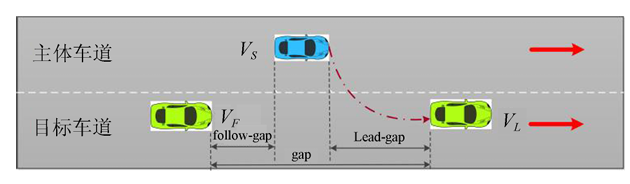
智能汽车在复杂环境下尤其是非结构化道路条 件下的决策能力是衡量其智能化的标准. 在任何交通模型和仿真系统中,换道场景都是 非常重要的研究点,在换道问题的研究中,必须要考虑车辆间信息的交互,智能汽车如何基于对周围车 辆行驶意图的预测,以及环境的变化并结合自身动 态信息及时、有效、安全地作出决策是换道场景问 题研究的重点.换道场景可以分为自由换道、强制 换道和协作式换道3个场景,如图5所示.自由换道 场景下,待换道车辆Agent不需要与周围车辆Agent 进行交互,可根据与周围车辆Agent之间的安全距离 选择换道时机;强制换道为待换道车辆Agent以强制 周围车辆Agent减速形成安全距离的方式进行换道, 而协作式换道则基于待换道车辆Agent与周围车辆 Agent进行信息交互,周围车辆Agent主动调整自身 驾驶策略保证待换道车辆Agent安全换道.模型对 待换道车辆Agent的换道条件作了限制.换道并线的 点称为MP(MergePoint),到达并线点MP的加速度 为AM(MergeAcceleration).

其中,dx为当前位置到达MP点的距离,vMP和aMP 分别为车辆在MP点处的速度与加速度,vs为待换 道车辆Agent的速度.当车辆到达换道点,基于车辆 间距离(gap)、车辆间相对速度以及限定AM决定是 否适合换道
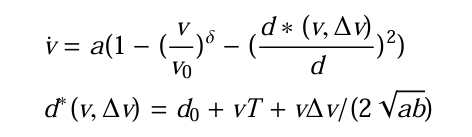
两种常用的控制速度和决定何时换道的模型是 建模汽车纵向动态特性的智能驾驶员模型(Intelli gentDrivingModel,IDM)和基于换道最小化刹车 次数MOBIL决定何时换道的模型
控制车速和换道可看成是强化学习问题,在 IDM 和MOBIL模型基础上提出一种深度学习与Q 学习相结合的深度Q-网络DQN智能体来学习Q 函数, 根据已知的周围车辆的状态和可用的道路信 息, 智能体在其动作空间选择最佳的换道、加速和减 速的动作,智能体的动作空间定义如表
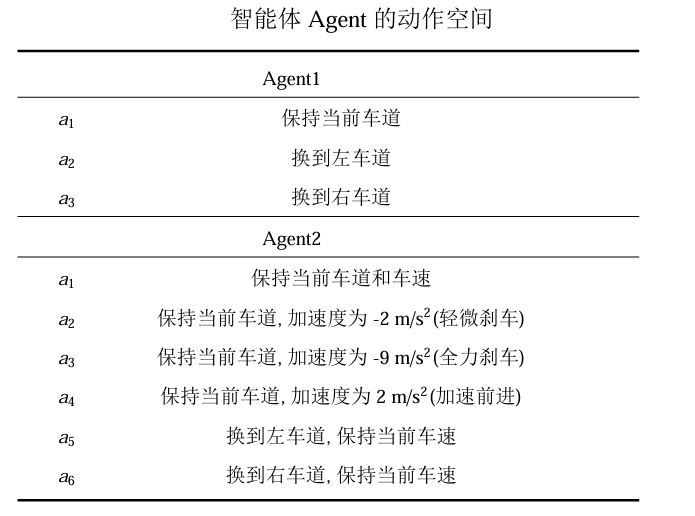
Agent1仅仅控制着换道决策,其速 度则由IDM模型自动地控制着
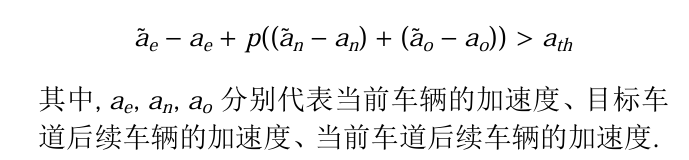
Agent2 则在使用 IDM 模型控制速度并估计周 围车辆Agent速度的基础上,使用MOBIL模型进行 换道决策,决策条件为
WANG 等利用长短时记忆(Long Short-Term Memory, LSTM) 网络建模交互环境, 将包含历史驾 驶信息的内部状态传到深度Q网络DQN中,在深度 强化学习架构下,交互环境长期影响的累计收益可 以用来决定最好的控制策略,这可用于智能车在复 杂的交叉路口的驾驶和执行换道.
人类驾驶汽车经常可以依靠对周围交通状况的 观察和感觉轻松地在高速公路完成换道超车,但很 多时候突然出现的加塞和变道会增加行车过程中发 生事故的几率,影响其他驾驶员的正常驾驶.而对于 智能汽车来说,换道这些动作都需要决策系统完成, 因此,智能车需要作出安全、和谐的决策.
当出现需要超车时,智能车首先在行驶过程中 需要不断对周围车辆的行为进行预测,然后在与他 车协作换道或者保持自己行车状态之间博弈,BMW 公司将预测算法加入到决策过程中去,先使用多项 式回归分类器进行实时预测,然后在动作空间选择 对应的避让或不避让策略,最终实现基于他车不确 定因素的协作行为的博弈
2.3.3 发展趋势
-
从 "单车 - 单路口" 协同升级为 "全城 - 全路网" 智能体网络,实现城市级交通优化
-
上海、北京等 20 + 城市正建设 "车路云一体化" 示范区,预计 2026 年覆盖主要城市
-
与低空无人机、智能轨道交通等融合,构建 "空地一体化" 智能交通网络
2.4 车辆运维管理
车辆运维管理是保障车辆安全运行、控制运营成本、提升服务质量的核心环节,传统模式依赖人工经验进行故障诊断、保养规划和维修调度,存在响应滞后、判断偏差大、资源配置低效等痛点。AI Agent通过模拟人类专家的决策逻辑,构建"感知-分析-决策-执行-反馈"的闭环智能系统,深度整合车载传感器数据、运维历史记录、环境工况等多源信息,实现运维管理从"事后抢修"向"事前预警"、"经验驱动"向"数据智能驱动"的转型。典型应用场景如下:
2.4.1 预测性维护
车载诊断Agent通过"感知-分析-决策-推送-执行"的闭环流程,实现对电池、电机等关键部件的实时监测、故障预警与维保方案推送,依托多源数据采集、边缘-云协同分析、智能决策与精准触达四个环节。
|-------|----------------|--------------------------|------|
| 环节 | 功能 | 关键技术/组件 | 响应时效 |
| 感知层 | 实时采集电池、电机等多维参数 | 车载传感器网络、T-Box、BMS/MCU接口 | 毫秒级 |
| 边缘分析层 | 本地异常检测与初步诊断 | 轻量AI模型(LSTM/孤立森林)、车载AI芯片 | 秒级 |
| 云端决策层 | 深度预测与维保方案生成 | 数字孪生、故障模式库、历史数据挖掘 | 分钟级 |
| 推送层 | 多渠道触达用户/服务商 | 车机APP、短信、4S店系统 | 即时 |
| 执行层 | 预约与远程干预 | 自动维保预约、充电策略调整 | 按需触发 |
2.4.2 OTA 智能调度
传统OTA升级常因触发时机不当(如通勤途中、紧急用车时)打断用户行程,引发体验诟病。AI Agent通过学习用户驾驶行为数据,精准识别"高概率空闲时段"(如夜间23:00-次日6:00、周末长期静置时段),自动在该窗口完成下载与安装,实现"无感升级"。同时,系统会主动避开用户高频用车时段(如早7:00-9:00、晚17:00-19:00通勤高峰),从根源上消除升级对用车的干扰。
AI Agent实现OTA智能调度的核心是"感知-规划-决策-执行-反馈"的闭环架构,依托多模块协同完成全流程调度优化,具体架构分为五层:
| 架构层级 | 核心功能 | 关键组件/技术 | 核心价值 |
|---|---|---|---|
| 感知层 | 全维度数据采集,为调度决策提供基础支撑 | 车载传感器、T-Box、车机系统;LSTM网络(用户行为学习) | 精准获取用户、车辆、网络多维数据,奠定调度基础 |
| 边缘计算层 | 本地实时分析,快速响应调度需求 | 车载AI芯片、轻量级分析模型、数据脱敏技术 | 降低网络延迟,保障数据安全,提升调度实时性 |
| 云端决策层 | 全局协同优化,生成个性化调度方案 | 大数据平台、深度学习模型、负载均衡算法 | 实现空闲时段精准预测、任务分级排序,保障全局调度高效 |
| 执行层 | 落地调度方案,完成升级全流程自动化执行 | 车机系统、手机APP、异常回滚机制 | 保障升级顺畅,实现无感体验,应对突发异常 |
| 反馈层 | 数据闭环迭代,优化调度模型 | 反馈收集系统、模型训练库 | 持续提升调度方案适配性,优化整体性能 |
2.4.3 数据安全与隐私保护
采用联邦学习与端侧加密,确保用户数据在本地处理,仅上传脱敏后的必要信息。

3 总结
AI Agent 正将汽车从单纯的交通工具转变为 "有感知、会思考、能协作" 的智能伙伴:
-
交互革命:从触控操作到自然对话,实现 "所说即所得"
-
服务升级:从被动执行到主动预判,提供全场景个性化体验
-
智能进化:从辅助工具到决策伙伴,构建更安全、高效的出行生态
随着端侧大模型、多模态融合技术的成熟,AI Agent 将进一步模糊数字与物理世界界限,使汽车成为人们生活中最自然、最贴心的智能伙伴。