数据降维:PCA主成分分析与UMAP算法的详细解读与实现
ming | 2025.12

在讲解具体的数据降维方法之前,我们必须要明白,什么是数据降维。我们可以从一个熟悉的场景来理解它。
假设你要买一台新手机,面对琳琅满目的品牌和型号,你会如何做出决定? 如果是我的话,我可能会去看评测视频或文章,下意识地聚焦于几个核心指标:CPU性能、屏幕素质、电池容量、拍照效果和价格。然后我会综合这些因素来选择一款手机。

现在,想象你拿到了一张极为详尽的手机参数总表,上面罗列了每一款在售机型的所有数据:
erlang
CPU型号,屏幕尺寸(英寸),电池容量(mAh),实测续航时间(小时),充电功率(W),从10%充满电所需时间(分钟),屏幕刷新率(Hz),内存与存储配置(GB),主摄传感器型号,整机重量(g),电源管理系统(PMIC)型号,射频前端(RFFE)模块,音频编解码器型号,搭载的各类传感器,基带芯片版本,图像信号处理器(ISP)型号,参考价格(元)...上面的这些信息对你挑选手机有帮助吗?当然有,但是太冗余了,有很多信息是没有必要的,其中像"射频前端(RFFE)"这类极其底层的硬件参数,对绝大多数消费者而言,其专业程度和决策相关性都极低,几乎等同于噪声。我相信应该没有人会通过一台手机的射频前端型号来选择手机。这时候,我们就要对这个表进行数据降维了。
数据降维的本质,是对原始数据做一次智能的"信息提纯" 。它并非随意丢弃,而是通过数学变换,将这张庞杂的表格转化为我们能够直观理解 和高效使用的"核心指标看板";比如上面的"电池容量"和"续航时间",这两个特征是高度相关的;再比如诸如"射频前端","PMIC"这些特征,可能对最终决策影响很小,大多数人都不会关注这个。因此我们可以将这些多余的特征维度去除,只留下最能对我们挑选手机有用的特征即可,这就是数据降维。
在机器学习领域中,一个数据集的特征(维度)动辄成百上千,高维数据不仅会增加计算负担,还容易引发"维度灾难",导致模型过拟合、泛化能力下降。(因为有很多特征之间高度相关,还有很多特征对当前任务没有什么影响,属于噪声)。
再举一个简单的例子,有如下的一张表:
| 水果 | 特征1 | 特征2 | 特征3 |
|---|---|---|---|
| 苹果 | 0.12 | 0.25 | 0.21 |
| 菠萝 | 0.50 | 0.98 | 0.62 |
| 香蕉 | 0.01 | 0.19 | 0.10 |
| 橘子 | 0.32 | 0.63 | 0.43 |
| 橙子 | 0.64 | 1.24 | 0.79 |
表面上,每个水果由三个特征定义,但实际上,所有有效信息都蕴含在"特征1"这一条轴上。特征2和特征3不过是特征1经过简单线性变换后的"影子"。
实际上,特征2 ≈ 特征1 × 2,特征3 ≈ 特征1 + 0.1。这意味着三个特征中存在严格的线性关系,信息是冗余的。
因此在数据降维的时候完全可以把特征2与3删去。
这个例子揭示了数据降维中一个最经典、也最强大的思想:在看似复杂的高维数据中,往往存在着少数几个"隐藏"的主轴,大部分数据变化都沿着这些主轴发生。找到它们,就相当于抓住了数据的本质结构。
当你对数据降维的必要性与核心思想有了基本了解后,下面就开始讲解数据降维领域最经典的算法------主成分分析(PCA),然后用代码实现一遍这个算法。最后再讲解使用一下现代主流数据降维算法UMAP。
注意:下面的内容需要你有一定的线性代数基础和numpy基础才能理解,否则会很难搞清楚PCA究竟做了一件什么事。
一. PCA主成分分析
要深入理解PCA主成分分析,我们首先需要掌握线性代数中的一个核心概念------SVD奇异值分解。如果你对这个概念还不熟悉,不用担心,接下来我会详细解释什么是SVD。
SVD奇异值分解是线性代数中一个极其重要的数学工具,它描述的是,对于任意一个矩阵 A(形状为 m×n),都能分解成三个矩阵的乘积 A=USVT。其中:
- U是一个 m×m的正交矩阵( UTU=I)
- VT是一个 n×n的正交矩阵( VVT=I)
- S是一个 m×n的对角矩阵,对角线上的元素称为奇异值,均为正数且通常按降序排列
注意,任意形状的矩阵都可以进行SVD奇异值分解,但是为了方便起见,这里就认为矩阵 A是一个方阵(形状为 n×n)
A=USVT=U s10⋮00s2⋮000⋱000⋮sn VT, (s1≥s2≥s3≥...≥sn≥0)
至于为什么任何一个矩阵能分解成三个特定的矩阵 U,S,VT的乘积,这就是数学问题了,SVD奇异值分解有着坚实的数学基础,如果你对证明过程感兴趣,可以自行在互联网上检索。
这里我们亲手实践一下,python的numpy库中有现成的SVD奇异值分解的函数,可以直接调用。
python
import numpy as np
# 定义矩阵A
A = np.array([[2.0, 3, 5],
[7, 11, 13],
[17, 19, 23]])
# 进行SVD奇异值分解
U, s, V_t = np.linalg.svd(A)
print(U)
print(s)
print(V_t)
python
# 输出
# U
array([[-0.15323907, -0.44072023, -0.8844679 ],
[-0.46548171, -0.75732959, 0.458016 ],
[-0.87169063, 0.48188958, -0.08909473]])
# s
array([39.37043356, 2.28397225, 0.86742829])
# V_t
array([[-0.466939 , -0.56240524, -0.68239894],
[ 0.87977217, -0.21755265, -0.42269583],
[-0.08926865, 0.79772877, -0.5963723 ]])注意,上面分解的 s之所以是一个一维数组而不是我们上面说的对角矩阵,是因为numpy出于存储效率的考虑,只存储有用的部分,因为其它地方都是0,没有必要存储,只存储对角线上的元素,大大提高存储效率。
现在,我们验证一下numpy进行的SVD矩阵分解是否正确,我们试试将 U,S,VT进行矩阵乘法,看看结果是不是 A。
首先,把 s变成对角矩阵 S
python
# 将s变为二维对角矩阵
S = np.zeros(A.shape)
S[: len(s), : len(s)] = np.diag(s)
print(S)
# 输出
array([[39.37043356, 0. , 0. ],
[ 0. , 2.28397225, 0. ],
[ 0. , 0. , 0.86742829]])
python
print(U @ S @ V_t) # 这里的@符号是矩阵乘法的意思
# 输出
array([[ 2., 3., 5.],
[ 7., 11., 13.],
[17., 19., 23.]])完美还原! 我们可以看到,通过SVD分解后再重新组合,我们得到了原始的矩阵A。这验证了SVD分解的正确性。
虽然我们在示例中使用了numpy的linalg.svd函数,但在处理大规模数据时,我们通常不会直接使用这个函数来实现,因为它很占内存,并且计算量非常大,小型矩阵还好,但是我们实际应用中要处理的矩阵都是成百上千维的。
接下来,我们换一个视角,将矩阵 U 的每一列看成一个列向量 pi ,将矩阵 V 的每一列看成一个列向量 qi ,那么上面的式子就可以重新表述为:
A=USVT=p1 ,p2 ...,pn s10⋮00s2⋮000⋱000⋮sn q1 Tq2 T⋮qn T
现在,我们将这个式子进行展开化简,利用矩阵乘法的分配律,将其拆解为一系列"多项式"之和:
A=s1p1 q1 T+s2p2 q2 T+...+snpn qn T
请注意,由于列向量 pi 的形状为 (n,1),行向量 qi T 的形状为 (1,n),因此每一项 pi qi T 都是一个 n×n 的矩阵。而每个奇异值 si 则充当了对应子矩阵的权重系数 ,它的大小衡量了该子矩阵在重构原始矩阵 A 时的重要性。
由此,我们发现一个重要的洞察:一个复杂的矩阵 A,可以被分解为一系列简单(秩为1)矩阵的加权和。
那么,一个自然的想法就产生了:既然每个子矩阵的贡献由权重 si 决定,我们是否可以舍弃那些权重非常小的子矩阵,而只用剩下的主要部分来近似原矩阵 A 呢?毕竟,权重小的项对最终合成结果的"影响"微乎其微。
答案是肯定的,而这正是SVD用于数据降维的核心思想。 由于奇异值满足 s1≥s2≥s3≥...≥sn≥0,通常它们会快速衰减。这意味着前几个奇异值往往包含了矩阵中绝大部分的信息或"能量"。因此,我们可以只保留前几个最大的奇异值及其对应的子矩阵,来得到一个非常优秀的近似。
A≈s1p1 q1 T+s2p2 q2 T+s3p3 q3 T
从矩阵运算的角度看,这个近似过程等价于将三个分解矩阵 U,S,VT 同时进行"截断":
A≈p1 ,p2 ,p3 s1000s2000s3 q1 Tq2 Tq3 T
如果你不相信,我们可以做一个实验。
我们知道,一张灰度图像本质上就是一个数值矩阵,每个像素值通常在 0 到 255 之间。
这里,我使用一张大小为 640×640 的灰度图像 Frieren.jpg。
现在,我用Python读取这张图像,得到一个形状为 (640,640) 的矩阵 A,并对其进行奇异值分解(SVD),得到 U,S,VT。
python
import numpy as np
from PIL import Image # 需要引入pillow库,用来处理图像
# 读取灰度图像
def read_grayscale_image(image_path):
img = Image.open(image_path).convert('L')
img_array = np.array(img)
return img_array
image_path = './Frieren.jpg'
A = read_grayscale_image(image_path)
# 进行完整的SVD分解
U, S, Vt = np.linalg.svd(A)不推荐使用上面的代码进行SVD分解,效率非常低,下文会有更加高效的SVD分解实现
由于 A 是 640×640 的矩阵,根据公式 A=∑i=1640sipi qi T,它由640个子矩阵相加而成。现在,我们分别进行"截断"近似:
- 仅使用最大的前8个子矩阵进行重建。
- 仅使用最大的前30个子矩阵进行重建。
- 仅使用最大的前80个子矩阵进行重建。
然后,我们观察这些近似结果与原始图像的对比:
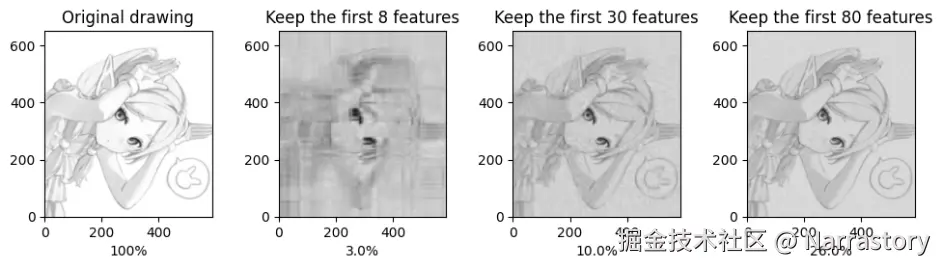
从上图可以清晰地看到:
- 第一张图是原始图像,由全部640个成分组成。
- 第二张图仅保留了最核心的8个成分,已经能勾勒出人物的基本轮廓和主要特征,尽管细节模糊且存在块状伪影。
- 第三张图在轮廓的基础上,恢复了更多的细节和纹理,图像质量显著提升。
- 第四张图已经能够非常出色地还原原图像,绝大多数细节都得以保留。
这个实验生动地展示了SVD降维的威力:我们仅仅使用了前80个最重要的"特征层"(占总数的12.5%),就实现了对原始数据高达99%以上的视觉保真度。 而剩下的560个子矩阵,其对应的奇异值/权重已经变得非常小,它们所包含的视觉信息大多是极其细微的细节、平滑区域的渐变噪声,或者是人眼不敏感的极高频成分 。舍弃它们可以极大地节省"带宽"或"存储空间"。
如果你已经理解了前面的内容,那么真正的PCA主成分分析对你来说已经触手可及了。
现在假设我们有一个数据集,包含 m 个样本,每个样本有 n 个特征,可以将其表示为一个形状为 (m,n) 的矩阵 A。在进行 PCA 之前,我们通常需要对数据进行标准化处理(这是关键步骤,确保不同量纲的特征具有可比性)。
我们知道对于任意一个矩阵 A(形状为 m×n),都能分解成三个矩阵的乘积 A=USVT。在我们对矩阵 A进行分解后,我们得到了如下矩阵:
- U是一个 m×m的正交矩阵
- VT是一个 n×n的正交矩阵
- S是一个 m×n的对角矩阵
现在就看你要保留几个奇异值及其对应的子矩阵了,假设你只想保留最大的3个奇异值,那么就要对 U,S,VT进行截断处理;截断后的矩阵如下:
- U^:取 U 的前 3 列,形状为 m×3
- S^:取 S 的前 3 个奇异值构成的对角矩阵,形状为 3×3
- V^T:取 VT 的前 3 行,形状为 3×n
那么降维后的矩阵 A′=A⋅V^, A′的形状为 (m,3);其中 V^ 是 V^T 的转置
注意,对于等式 A=USVT,在等式两边同乘一个 V,得到 AV=USVTV;因为 V是正交矩阵,所以 VVT=E,原式就可以写成 AV=US
所以降维后的矩阵也可以由这个式子得到: A′=U^⋅S^;两种方式是等价的。
矩阵 A′即为我们通过 PCA 得到降维后的数据表示。这就是PCA主成分分析的数学流程了;到这里就结束了,我们的目标就是得到 A′。我知道你看到这里肯定会很困惑,为什么仅仅通过这样的矩阵乘法就能实现降维?的确,数学是非常有趣的,仅靠白纸黑字和静态的图片可能很难领会到PCA的精髓,PCA需要从几何的角度来理解,这需要你有比较强的线性代数几何基础,如果你看不懂下面的我对PCA的解释,非常推荐看看3Blue1Brown的可视化线性代数教程和可视化PCA教程。
任何两个矩阵相乘,在几何上都可以看作是对空间施加了一次变换------包括拉伸、旋转等操作。具体来说,若矩阵 A 与矩阵 B 相乘得到 A⋅B,则相当于将矩阵 A 所表示的向量按行(或以行为坐标的向量组)进行 B 所定义的线性变换;反过来看,也可以理解为将矩阵 B 所表示的向量按列(或以列为坐标的向量组)进行 A 所定义的线性变换。
特别地,当变换矩阵为对角矩阵 S 时, A⋅S 意味着对 A 的每一行向量,在由 S 确定的各个正交轴方向上进行独立的缩放(即纯拉伸,无旋转)。此时, S 对角线上的数值就代表对应坐标轴方向上的拉伸因子。而当变换矩阵为正交矩阵 U 时, A⋅U 则 表示对 A 的行向量进行一种"刚性"旋转变换,不改变向量的长度与彼此间的正交性,因此是保范数且保内积的变换。
基于这样的几何视角,我们可以理解:任何一个矩阵 A 都可以通过单位矩阵 E 经过一系列变换得到。具体来说,存在正交矩阵 U与 VT,以及对角矩阵 S,使得:
E⋅U⋅S⋅VT=A这实际上是奇异值分解的几何表达:从单位矩阵 E 出发,先经过 U 进行旋转,再经过 S 在各正交方向上做不同程度的拉伸,最后通过 VT 再做一次旋转,最终得到矩阵 A。其中, S 的对角元素称为奇异值,它们的大小反映了对应方向上的拉伸强度。奇异值越大,说明该方向上的信息"强度"越高,对数据整体结构的贡献也越大。
值得注意的是,在 E⋅U⋅S 这一步,矩阵的"形态"------即数据在各主要方向上的分布强度------实际上已经确定;最后的 VT 变换只是对整个结构做一次整体旋转,并不改变数据的内部相对关系与分布特性。因此,我们完全可以用 U⋅S 来捕捉 A 的核心结构信息。这也意味着,如果我们希望降低数据的维度,可以保留奇异值较大的方向,而舍弃那些奇异值很小的方向,因为它们所包含的信息量很有限,对整体结构的贡献较小。
于是,降维后的近似矩阵可表示为:
A′=U^⋅S^
接下来,我们介绍如何在实际应用中高效地对大规模矩阵进行降维操作。这里我们借助 Python 的 sklearn 库来实现。不需要担心你不熟悉这个库,在学习这些强大的工具库(如 SciPy、scikit-learn、Pytorch)时,一个高效的策略是 "按需所学,而非系统通读" 。试图一开始就系统性地掌握一个庞大库的所有内容,很容易陷入大量专业术语的泥潭。更好的方式是,在具体项目中遇到什么需求,再去深入学习该库对应的模块。这能让你始终保持目标清晰,理解也更为深刻。
下面我们就来学习如何使用 sklearn 中提供的 PCA 类,它内部基于高效且稳定的 SVD 实现,只需几行代码即可完成降维。
sklearn库的安装方法为:
bash
pip install scikit-learn使用示例:
python
import numpy as np
from sklearn.decomposition import TruncatedSVD
# 示例数据
A = np.array([[3, 4, 3],
[5, 1, 6],
[7, 2, 9],
[8, 3, 7]])
# 初始化截断 SVD,保留前 2 个最大的主成分/奇异值
svd = TruncatedSVD(n_components=2)
# 进行数据降维
# 计算出来的result_A就是A',因为只保留了两个最大的主成分,所以A'矩阵只有两列
result_A = svd.fit_transform(A)
s = svd.singular_values_ # 奇异值数组
V_t = svd.components_ # 因为只保留了两个最大的主成分,所以V_t矩阵只有两行
# 获取分解结果
print("奇异值s:", s)
print("V_t:", V_t)
print("A'",result_A)
# ===输出===
奇异值s:
[18.43513181 3.20662265]
V_t:
[[ 0.65528575 0.24759647 0.71365018]
[ 0.02053089 0.93856832 -0.34448222]]
A':
[[ 5.09719365 2.78241927]
[ 7.80592628 -1.02567055]
[11.50504478 -1.07948712]
[10.98062664 0.56857653]]要想通过 A′重建原来的 A也很简单,因为 A′=A⋅V^,所以 A=A′⋅V^T;注意,因为 A′是已经降维后的矩阵了,降维过程中丢弃了部分信息,我们无法完全精确地还原原始数据,转换回的新的 A后也不再是原来的 A了,它肯定与原始 A接近,但存在些许差异,这就要看你保留了多少奇异值了。
python
new_A = result_A @ V_t
print(new_A)
# ===输出===
[[3.39724391, 3.8735377 , 2.67911918],
[5.09405433, 0.97005788, 5.92402595],
[7.51692906, 1.83543602, 8.58244137],
[7.20712154, 3.25241226, 7.64046165]]以上就是PCA算法的全部内容。可以看到,PCA的数学原理较为直观,实现也相对容易;但正因如此,它也存在明显的局限性。PCA只能捕捉数据中的线性结构,对于非线性复杂关系的降维效果往往不够理想。此外,PCA对异常值较为敏感,极端值可能会显著影响主成分的方向,从而降低降维结果的质量。
尽管如此,PCA依然是目前最常用和基础的降维方法之一。在实际应用中,很多降维流程会先使用PCA进行初步处理,消除部分噪声与冗余,再结合其他非线性降维方法进一步提取数据结构。
二. UMAP算法
UMAP是一种近年来广受关注的非线性降维算法。与PCA相比,UMAP能够更有效地捕捉数据中复杂的非线性结构,因此在许多实际任务中表现更为强大。
UMAP的理论基础建立在坚实的现代数学框架之上,主要涉及黎曼几何与代数拓扑。它通过构建高维空间中的数据拓扑结构,并尝试在低维空间中保持该结构的本质特征。简单来说,UMAP 的核心思想是在降维过程中尽量保持数据的局部结构------就好像将高维空间中的几何形状"平滑地展开"到低维空间中,形成一张保持相对结构的"解剖图"。
相较于其他非线性降维方法(如 t-SNE),UMAP 的优势非常明显,比如计算效率很高,内存消耗更小,可以处理百万级别的数据等。
尽管UMAP与PCA的最终目标一致------减少数据维度、去除冗余信息,但二者处理数据内在结构的方式有本质不同。下面我们将重点介绍如何使用UMAP工具包进行降维,而不深入其数学细节。
首先需要安装UMAP库
bash
pip install umap-learn为了直观展示UMAP的降维效果,我们以经典的鸢尾花(Iris)数据集为例,演示完整的降维流程。这是一个多分类数据集,包含3个类别(三种鸢尾花品种),每个类别50个样本,共150个样本。每个样本有4个特征:花萼长度、花萼宽度、花瓣长度和花瓣宽度。
鸢尾花(Iris)数据集是sklearn库自带的,只要你之前安装过sklearn库就已经内置了这个数据集了。
python
import numpy as np
from sklearn.datasets import load_iris # 引入鸢尾花数据集
# 加载鸢尾花数据集
iris = load_iris()
A = iris.data # 获取特征矩阵,类型为numpy数组
labels = iris.target # 标签向量,0/1/2分别对应三种鸢尾花
print(A.shape) # 获取A的形状
print(A[0:10]) # 查看前10个数据
# ===输出===
(150, 4)
[[5.1 3.5 1.4 0.2]
[4.9 3. 1.4 0.2]
[4.7 3.2 1.3 0.2]
[4.6 3.1 1.5 0.2]
[5. 3.6 1.4 0.2]
[5.4 3.9 1.7 0.4]
[4.6 3.4 1.4 0.3]
[5. 3.4 1.5 0.2]
[4.4 2.9 1.4 0.2]
[4.9 3.1 1.5 0.1]]在获取到样本矩阵后,要对其进行标准化处理(这一步非常关键!PCA中在降维前也是要先进行标准化处理!),之后才能进行降维操作。
python
# 进行标准化处理
from sklearn.preprocessing import StandardScaler
scaler = StandardScaler()
scaled_A = scaler.fit_transform(A) # 对A进行标准化
print(scaled_A[0:10]) # 查看前10个数据
# === 输出 ===
[[-0.90068117 1.01900435 -1.34022653 -1.3154443 ]
[-1.14301691 -0.13197948 -1.34022653 -1.3154443 ]
[-1.38535265 0.32841405 -1.39706395 -1.3154443 ]
[-1.50652052 0.09821729 -1.2833891 -1.3154443 ]
[-1.02184904 1.24920112 -1.34022653 -1.3154443 ]
[-0.53717756 1.93979142 -1.16971425 -1.05217993]
[-1.50652052 0.78880759 -1.34022653 -1.18381211]
[-1.02184904 0.78880759 -1.2833891 -1.3154443 ]
[-1.74885626 -0.36217625 -1.34022653 -1.3154443 ]
[-1.14301691 0.09821729 -1.2833891 -1.44707648]]接下来进行umap降维:
python
import umap
# 初始化 UMAP 模型,设定目标维度为2,固定随机种子以保证可重复性
reducer = umap.UMAP(n_components=2, random_state=42)
embedding_A = reducer.fit_transform(scaled_A) # 进行UMAP数据降维
print(embedding_A.shape) # 查看降维后的数据形状
print(embedding_A[0:10]) # 查看降维后的前10个样本
# === 输出 ===
(150, 2)
[[13.515001 4.9760547]
[11.787091 3.2109737]
[11.698444 3.7325902]
[11.408422 3.5530434]
[13.728321 5.26629 ]
[14.782503 5.270304 ]
[12.758788 4.6392527]
[13.191469 4.637623 ]
[11.2218685 3.2424262]
[11.846259 3.354508 ]]umap.UMAP()函数的常用参数如下:
| 参数 | 作用 | 推荐范围 | 影响 |
|---|---|---|---|
n_neighbors |
控制局部结构的粒度 | 5~50(默认15) | ↗️ 值越大保留全局结构,↘️ 值越小保留局部细节 |
min_dist |
控制点的聚集程度 | 0.001~0.5(默认0.1) | ↗️ 值越大点越分散,↘️ 值越小聚类越紧密 |
n_components |
降维后的维度 | 2或3(用于可视化) | 一般选2维绘图,3维可交互 |
metric |
距离度量方法 | 'euclidean'(默认)、'cosine'、'manhattan' | 根据数据特性选择,例如文本用余弦距离 |
n_jobs |
并行计算使用的CPU核心数 | 根据自己电脑CPU核心数适当配置 | 加速计算 |
random_state |
随机种子 | 任意整数 | 固定后可保证每次运行结果一致。 |
注意:一般情况下umap要保留参数random_state,这样才能保证每次运行结果一致。使得结果可重现。缺点就是它只能在一个CPU核心上运行。若是reducer = umap.UMAP(n_components=2, n_jobs=-1) # -1 表示使用所有CPU核心,就是并行计算,运算速度会大大提升,缺点就是每次降维后的结果可能不同,这种只适合数据可视化的时候使用。
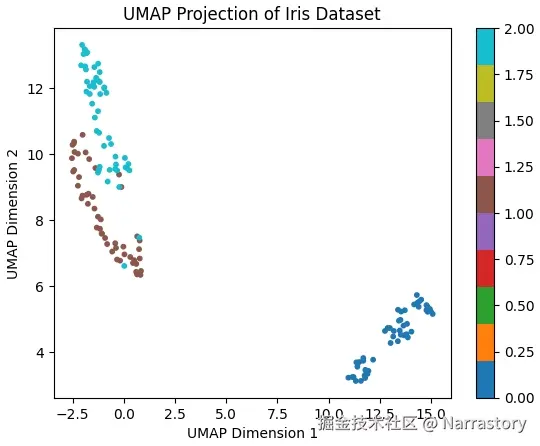
将数据降至二维后,我们可以将这些点绘制在平面直角坐标系中,直观查看降维效果,并用颜色区分不同类别。
python
import matplotlib.pyplot as plt # 引入matplotlib库绘制图表
# 数据可视化(使用散点图)
y = data.target # 获取每个样本的标签
plt.scatter(embedding[:, 0], embedding[:, 1], c=y, cmap="tab10", s=10)
plt.title("UMAP Projection of Iris Dataset")
plt.xlabel("UMAP Dimension 1")
plt.ylabel("UMAP Dimension 2")
plt.colorbar()
plt.show()从图中可以看出,降维后的二维数据依然保持了原始数据中三个类别的分离结构,同类样本聚集在一起,不同类之间边界清晰。这说明 UMAP 在降维过程中有效保留了数据的类别信息。
如果你已经用umap降维后的训练集训练了一个模型,那么未来进行推理的时候,新数据如何进行预处理呢?对训练集的数据是如何进行预处理的,那么对新数据就是一样的预处理。
python
newData2Predicted = np.array([[4,3,1,0.3]]) # 一个新数据,需要输入到模型中进行运算
# 先将其标准化,再转换为低维,再送到模型中去运算
# 注意不能再创建新的scaler和reducer,必须是之前在处理训练集时定义的scaler和reducer才行。
lowDemensionVersion = reducer.transform(scaler.transform(newData2Predicted))
# 降维后的新数据
print(lowDemensionVersion)
# === 输出 ===
[[11.103776 , 3.8664804]]更常用的方法是本地化保存这两个预处理函数scaler和reducer
python
import joblib
# 本地化数据预处理模型,将其保存为本地文件
joblib.dump(scaler, 'scaler.pkl')
joblib.dump(reducer, "reducer.pkl")
python
newData2Predicted = np.array([[4, 3, 1, 0.3]]) # 一个新数据
# 需要使用的时候再通过加载预处理模型来对其进行预处理
savedScaler = joblib.load('./scaler.pkl')
savedReducer = joblib.load('./reducer.pkl')
newLowDemensionVersion = savedReducer.transform(savedScaler.transform(newData2Predicted))
print(newLowDemensionVersion)
# === 输出 ===
[[11.103776 , 3.8664804]]