前言
本章主要讲述 ESP32S3(N16R8) CAMMERA 基于arduino 实现图像上传并显示
1:硬件及环境
arduino 2.3.*
ESP32S3-CAM(N16R8 44pin),不是 S3-EYE版本的
LCD 2.4 320*240 (st7789 SPI 8PIN引脚,就是有背板的)
面包板 杜邦线 若干
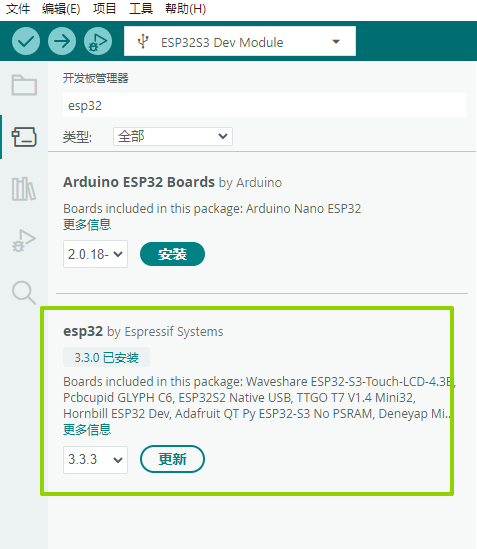
2:安装esp32

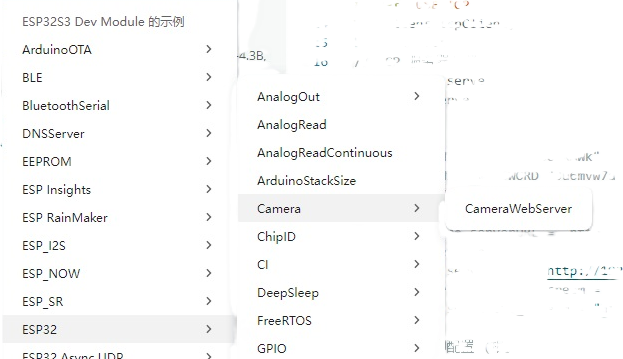
3:代码 基于 esp32->camera->camerawebserver 修改
c
#include "esp_camera.h"
#include "WiFi.h"
#include "HTTPClient.h"
#include "base64.h"
#include "driver/ledc.h"
// WiFi 配置
const char* ssid = "换成自己的SSID";
const char* password = "换成自己的密码";
#define USE_TCP
//#define USE_HTTP
#ifdef USE_TCP
WiFiClient tcpClient;
bool connected = false;
// TCP 服务器配置
const char* serverIP = "192.168.1.3"; // Python 服务器 IP
const int serverPort = 8081;
#endif
// WiFi配置
// #define WIFI_SSID "*****"
// #define WIFI_PASSWORD "*****"
#ifdef USE_HTTP
// 服务器配置
// const char* serverURL = "http://your-server.com/upload";
// const char* serverURL_stream = "http://your-server.com/stream";
const char* serverURL = "http://192.168.1.3:8080/upload";
//const char* serverURL_stream = "http://192.168.1.3:8080/stream";
const char* serverURL_stream = "http://192.168.1.3:5000/stream";
#endif
// 摄像头引脚配置 (根据你的 ESP32-S3 CAM 板)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 15
#define SIOD_GPIO_NUM 4
#define SIOC_GPIO_NUM 5
#define Y9_GPIO_NUM 16
#define Y8_GPIO_NUM 17
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 12
#define Y5_GPIO_NUM 10
#define Y4_GPIO_NUM 8
#define Y3_GPIO_NUM 9
#define Y2_GPIO_NUM 11
#define VSYNC_GPIO_NUM 6
#define HREF_GPIO_NUM 7
#define PCLK_GPIO_NUM 13
// #define PWDN_GPIO_NUM -1
// #define RESET_GPIO_NUM -1
// #define XCLK_GPIO_NUM 15
// #define SIOD_GPIO_NUM 4
// #define SIOC_GPIO_NUM 5
// #define Y2_GPIO_NUM 11
// #define Y3_GPIO_NUM 9
// #define Y4_GPIO_NUM 8
// #define Y5_GPIO_NUM 10
// #define Y6_GPIO_NUM 12
// #define Y7_GPIO_NUM 18
// #define Y8_GPIO_NUM 17
// #define Y9_GPIO_NUM 16
// #define VSYNC_GPIO_NUM 6
// #define HREF_GPIO_NUM 7
// #define PCLK_GPIO_NUM 13
// 流媒体设置
bool enableStream = true;
unsigned long lastCaptureTime = 0;
//const unsigned long CAPTURE_INTERVAL = 100; // 毫秒 (10 FPS)
const unsigned long CAPTURE_INTERVAL = 50; // 毫秒 (10 FPS)
/////////////////////////////////////////////
// RGB LED 引脚定义 (根据你的实际连接修改)
#define RGB_RED 1 // 红色引脚
#define RGB_GREEN 2 // 绿色引脚
#define RGB_BLUE 3 // 蓝色引脚
// PWM 设置
const int freq = 5000;
const int resolution1 = 8; // 8位分辨率 (0-255)
// LED 状态
int ledMode = 0; // 0=关闭, 1=呼吸灯, 2=彩虹, 3=状态指示
bool ledEnabled = true;
#define RGB_LED 48
#ifdef USE_TCP
void connectTCP() {
Serial.printf("尝试连接TCP服务器: %s:%d\n", serverIP, serverPort);
if (tcpClient.connect(serverIP, serverPort)) {
connected = true;
Serial.println("✅ TCP连接成功!");
} else {
connected = false;
Serial.println("TCP连接失败!");
}
}
void sendVideoFrame() {
camera_fb_t *fb = esp_camera_fb_get();
if (!fb) {
Serial.println(" 摄像头捕获失败");
return;
}
if (tcpClient.connected()) {
// 发送帧头:4字节长度 + 数据
uint32_t frameSize = fb->len;
tcpClient.write((uint8_t*)&frameSize, 4); // 先发送长度
tcpClient.write(fb->buf, fb->len); // 再发送数据
Serial.printf("📹 发送帧: %d bytes\n", fb->len);
}
esp_camera_fb_return(fb);
}
#endif
void setupRGB() {
// 配置PWM通道
// ledcSetup(0, freq, resolution1); // 红色通道
// ledcSetup(1, freq, resolution1); // 绿色通道
// ledcSetup(2, freq, resolution1); // 蓝色通道
// 绑定引脚到PWM通道
// ledcAttachPin(RGB_RED, 0);
// ledcAttachPin(RGB_GREEN, 1);
// ledcAttachPin(RGB_BLUE, 2);
ledcAttach(RGB_LED,freq,resolution1);
// 初始关闭LED
// setRGBColor(0, 0, 0);
Serial.println("✅ RGB LED 初始化完成");
}
// 设置RGB颜色
void setRGBColor(int red, int green, int blue) {
// ledcWrite(0, red); // 红色
// ledcWrite(1, green); // 绿色
// ledcWrite(2, blue); // 蓝色
ledcWrite(RGB_LED,0);
}
void setup() {
Serial.begin(115200);
Serial.println("ESP32-S3 Camera WiFi Streaming");
// 初始化摄像头
if (!setupCamera()) {
Serial.println("摄像头初始化失败!");
while (true) delay(1000);
}
// 连接WiFi
connectWiFi();
// 连接TCP服务器
connectTCP();
//setupRGB();
Serial.println("系统启动完成");
}
bool setupCamera() {
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
// OV3640 初始化参数
config.frame_size = FRAMESIZE_VGA;//FRAMESIZE_SVGA 800x600 FRAMESIZE_VGA, // 640x480
config.jpeg_quality = 12; // 0-63, 数值越小质量越高
config.fb_count = 2;
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("摄像头初始化失败,错误代码: 0x%x", err);
return false;
}
// 调整摄像头设置
// sensor_t *s = esp_camera_sensor_get();
// if (s != NULL) {
// s->set_brightness(s, 0); // -2 to 2
// s->set_contrast(s, 0); // -2 to 2
// s->set_saturation(s, 0); // -2 to 2
// s->set_special_effect(s, 0); // 0 to 6 (0 - No Effect)
// s->set_whitebal(s, 1); // 0 = disable , 1 = enable
// s->set_awb_gain(s, 1); // 0 = disable , 1 = enable
// s->set_wb_mode(s, 0); // 0 to 4 - if awb_gain enabled (0 - Auto)
// s->set_exposure_ctrl(s, 1); // 0 = disable , 1 = enable
// s->set_aec2(s, 0); // 0 = disable , 1 = enable
// s->set_ae_level(s, 0); // -2 to 2
// s->set_aec_value(s, 300); // 0 to 1200
// s->set_gain_ctrl(s, 1); // 0 = disable , 1 = enable
// s->set_agc_gain(s, 0); // 0 to 30
// s->set_gainceiling(s, (gainceiling_t)0); // 0 to 6
// s->set_bpc(s, 0); // 0 = disable , 1 = enable
// s->set_wpc(s, 1); // 0 = disable , 1 = enable
// s->set_raw_gma(s, 1); // 0 = disable , 1 = enable
// s->set_lenc(s, 1); // 0 = disable , 1 = enable
// s->set_hmirror(s, 0); // 0 = disable , 1 = enable
// s->set_vflip(s, 0); // 0 = disable , 1 = enable
// s->set_dcw(s, 1); // 0 = disable , 1 = enable
// s->set_colorbar(s, 0); // 0 = disable , 1 = enable
// }
//彩色图像
sensor_t *s = esp_camera_sensor_get();
if(s){
s->set_quality(s,12);
s->set_brightness(s,1); // 提高亮度补偿室内光线
s->set_contrast(s, 1);
s->set_saturation(s, 2); // 提高饱和度
s->set_sharpness(s,1);
s->set_wb_mode(s,3); // 办公室/室内白平衡
s->set_aec_value(s,600); // 增加曝光补偿
s->set_agc_gain(s, 12); // 提高增益
s->set_gainceiling(s,GAINCEILING_32X); // 32x增益上限
///////////////////////////////////
//保持
s->set_special_effect(s, 0); // 0 to 6 (0 - No Effect)
s->set_whitebal(s, 1); // 0 = disable , 1 = enable
s->set_awb_gain(s, 1); // 0 = disable , 1 = enable
s->set_exposure_ctrl(s, 1); // 0 = disable , 1 = enable
s->set_aec2(s, 0); // 0 = disable , 1 = enable
s->set_ae_level(s, 0); // -2 to 2
//s->set_aec_value(s, 300); // 0 to 1200
s->set_gain_ctrl(s, 1); // 0 = disable , 1 = enable
s->set_bpc(s, 0); // 0 = disable , 1 = enable
s->set_wpc(s, 1); // 0 = disable , 1 = enable
s->set_raw_gma(s, 1); // 0 = disable , 1 = enable
s->set_lenc(s, 1); // 0 = disable , 1 = enable
s->set_hmirror(s, 0); // 0 = disable , 1 = enable
s->set_vflip(s, 0); // 0 = disable , 1 = enable
s->set_dcw(s, 1); // 0 = disable , 1 = enable
s->set_colorbar(s, 0); // 0 = disable , 1 = enable
}
Serial.println("摄像头初始化成功");
return true;
}
void connectWiFi() {
WiFi.begin(ssid, password);
Serial.print("连接WiFi");
int attempts = 0;
while (WiFi.status() != WL_CONNECTED && attempts < 20) {
delay(500);
Serial.print(".");
attempts++;
}
if (WiFi.status() == WL_CONNECTED) {
Serial.println("\nWiFi连接成功!");
Serial.print("IP地址: ");
Serial.println(WiFi.localIP());
} else {
Serial.println("\nWiFi连接失败!");
}
}
void loop() {
// 检查WiFi连接
if (WiFi.status() != WL_CONNECTED) {
Serial.println("WiFi断开,尝试重连...");
connectWiFi();
#ifdef USE_TCP
connectTCP();
#endif
delay(1000);
return;
}
#ifdef USE_TCP
// 检查TCP连接
if (!tcpClient.connected()) {
Serial.println("TCP连接断开,尝试重连...");
// rgbLED.setMode(3);
connectTCP();
delay(1000);
return;
}
#endif
// 控制捕获频率
unsigned long currentTime = millis();
if (currentTime - lastCaptureTime >= CAPTURE_INTERVAL) {
lastCaptureTime = currentTime;
if (enableStream) {
// 实时流媒体模式
#ifdef USE_TCP
sendVideoFrame();
#endif
#ifdef USE_HTTP
streamVideo();
#endif
} else {
// 单张图片上传模式
#ifdef USE_HTTP
captureAndUpload();
#endif
}
}
// 其他任务可以在这里执行
delay(10);
}
void streamVideo() {
#ifdef USE_HTTP
camera_fb_t *fb = esp_camera_fb_get();
if (!fb) {
Serial.println("摄像头捕获失败");
return;
}
// 将图像转换为base64
String imageData = base64::encode(fb->buf, fb->len);
// 发送HTTP POST请求
if (sendImageToServer(imageData, true)) {
Serial.printf("流媒体帧发送成功, 大小: %d bytes\n", fb->len);
} else {
Serial.println("流媒体发送失败");
}
esp_camera_fb_return(fb);
#endif
}
void captureAndUpload() {
#ifdef USE_HTTP
camera_fb_t *fb = esp_camera_fb_get();
if (!fb) {
Serial.println("摄像头捕获失败");
return;
}
// 将图像转换为base64
String imageData = base64::encode(fb->buf, fb->len);
// 发送HTTP POST请求
if (sendImageToServer(imageData, false)) {
Serial.printf("图片上传成功, 大小: %d bytes\n", fb->len);
} else {
Serial.println("图片上传失败");
}
esp_camera_fb_return(fb);
#endif
}
#ifdef USE_HTTP
bool sendImageToServer(String imageData, bool isStream) {
HTTPClient http;
if (isStream) {
http.begin(serverURL_stream);
} else {
http.begin(serverURL);
}
http.addHeader("Content-Type", "application/json");
// 创建JSON数据
String jsonData = "{\"image\":\"" + imageData + "\",";
jsonData += "\"timestamp\":" + String(millis()) + ",";
jsonData += "\"camera\":\"ESP32-S3\",";
jsonData += "\"format\":\"jpg\"}";
int httpResponseCode = http.POST(jsonData);
bool success = (httpResponseCode == 200);
if (!success) {
Serial.printf("HTTP错误代码: %d\n", httpResponseCode);
}
http.end();
return success;
}
#endif
// 串口命令处理
void serialEvent() {
while (Serial.available()) {
String command = Serial.readStringUntil('\n');
command.trim();
if (command == "stream on") {
enableStream = true;
Serial.println("开启流媒体模式");
} else if (command == "stream off") {
enableStream = false;
Serial.println("关闭流媒体模式");
} else if (command == "capture") {
captureAndUpload();
} else if (command == "status") {
printStatus();
} else if (command.startsWith("quality ")) {
int quality = command.substring(8).toInt();
setJpegQuality(quality);
}
}
}
void printStatus() {
Serial.println("=== 系统状态 ===");
Serial.printf("WiFi状态: %s\n", WiFi.status() == WL_CONNECTED ? "已连接" : "未连接");
Serial.printf("流媒体模式: %s\n", enableStream ? "开启" : "关闭");
Serial.printf("IP地址: %s\n", WiFi.localIP().toString().c_str());
sensor_t *s = esp_camera_sensor_get();
if (s != NULL) {
Serial.printf("图像质量: %d\n", s->status.quality);
Serial.printf("帧大小: %d\n", s->status.framesize);
}
}
void setJpegQuality(int quality) {
sensor_t *s = esp_camera_sensor_get();
if (s != NULL) {
if (quality >= 0 && quality <= 63) {
s->set_quality(s, quality);
Serial.printf("设置图像质量为: %d\n", quality);
} else {
Serial.println("图像质量范围: 0-63 (0=最好, 63=最差)");
}
}
}python( 3.13.0) 服务器代码 基本上由AI生成,只修改了PORT就OK
可能需要安装opencv numpy等,提示缺撒就安装撒
python
import socket
import cv2
import numpy as np
import threading
import time
import struct
from datetime import datetime
#FRAMESIZE_VGA, // 640x480
video_width = 640
video_heigth =480
class TCPCameraServer:
def __init__(self, host='0.0.0.0', port=8081):
self.host = host
self.port = port
self.socket = None
self.running = False
self.clients = []
self.window_name = "ESP32-S3 实时视频流"
def start_server(self):
"""启动TCP服务器"""
try:
self.socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
self.socket.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
self.socket.bind((self.host, self.port))
self.socket.listen(5)
self.socket.settimeout(1.0) # 设置超时以便可以检查 running 状态
self.running = True
print(f"🚀 TCP视频流服务器启动在 {self.host}:{self.port}")
print("🎥 等待ESP32摄像头连接...")
# 启动客户端接受线程
accept_thread = threading.Thread(target=self.accept_clients)
accept_thread.daemon = True
accept_thread.start()
# 创建OpenCV窗口
cv2.namedWindow(self.window_name, cv2.WINDOW_NORMAL)
cv2.resizeWindow(self.window_name, video_width, video_heigth)
# 主显示循环
self.display_loop()
except Exception as e:
print(f"❌ 服务器启动失败: {e}")
finally:
self.stop_server()
def accept_clients(self):
"""接受客户端连接"""
while self.running:
try:
client_socket, client_address = self.socket.accept()
client_socket.settimeout(2.0)
print(f"✅ 客户端连接: {client_address}")
# 为每个客户端启动处理线程
client_thread = threading.Thread(
target=self.handle_client,
args=(client_socket, client_address)
)
client_thread.daemon = True
client_thread.start()
self.clients.append((client_socket, client_address, client_thread))
except socket.timeout:
continue
except Exception as e:
if self.running:
print(f"❌ 接受客户端错误: {e}")
def handle_client(self, client_socket, client_address):
"""处理单个客户端连接"""
print(f"📡 开始处理客户端: {client_address}")
try:
while self.running and client_socket.fileno() != -1:
# 接收帧长度 (4字节)
frame_size_data = self.recv_all(client_socket, 4)
if not frame_size_data:
break
frame_size = struct.unpack('<I', frame_size_data)[0]
# print(f"📦 接收帧大小: {frame_size} bytes")
# 接收图像数据
frame_data = self.recv_all(client_socket, frame_size)
if not frame_data:
break
# 处理图像数据
self.process_frame(frame_data, client_address)
except socket.timeout:
print(f"⏰ 客户端 {client_address} 接收超时")
except Exception as e:
print(f"❌ 处理客户端 {client_address} 错误: {e}")
finally:
client_socket.close()
self.remove_client(client_socket)
print(f"🔌 客户端断开: {client_address}")
def recv_all(self, sock, size):
"""接收指定数量的数据"""
data = b''
while len(data) < size:
try:
chunk = sock.recv(size - len(data))
if not chunk:
return None
data += chunk
except socket.timeout:
continue
except:
return None
return data
def process_frame(self, frame_data, client_address):
"""处理接收到的图像帧"""
try:
# 解码JPEG图像
nparr = np.frombuffer(frame_data, np.uint8)
frame = cv2.imdecode(nparr, cv2.IMREAD_COLOR)
if frame is not None:
# 在图像上添加信息
timestamp = datetime.now().strftime("%Y-%m-%d %H:%M:%S")
cv2.putText(frame, f"ESP32-S3 Camera - {client_address[0]}", (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 255, 0), 2)
cv2.putText(frame, timestamp, (10, 60),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 255), 2)
cv2.putText(frame, f"Frame Size: {len(frame_data)} bytes", (10, 90),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 0), 2)
# 存储最新的帧用于显示
self.latest_frame = frame
else:
print("❌ 图像解码失败")
except Exception as e:
print(f"❌ 处理帧错误: {e}")
def display_loop(self):
"""主显示循环"""
frame_count = 0
start_time = time.time()
self.latest_frame = None
print("🎥 开始显示视频流...")
print("💡 按 'q' 退出, 按 's' 保存截图")
while self.running:
if self.latest_frame is not None:
# 计算帧率
frame_count += 1
elapsed = time.time() - start_time
if elapsed >= 1.0:
fps = frame_count / elapsed
display_frame = self.latest_frame.copy()
cv2.putText(display_frame, f"FPS: {fps:.1f}", (10, 120),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 255, 255), 2)
cv2.imshow(self.window_name, display_frame)
frame_count = 0
start_time = time.time()
else:
cv2.imshow(self.window_name, self.latest_frame)
# 处理键盘输入
key = cv2.waitKey(1) & 0xFF
if key == ord('q'):
print("👋 用户退出")
break
elif key == ord('s'):
self.save_screenshot()
elif key == ord('c'):
self.show_client_info()
def save_screenshot(self):
"""保存截图"""
if self.latest_frame is not None:
filename = f"capture_{datetime.now().strftime('%Y%m%d_%H%M%S')}.jpg"
cv2.imwrite(filename, self.latest_frame)
print(f"📸 截图已保存: {filename}")
def show_client_info(self):
"""显示客户端信息"""
print(f"\n=== 客户端信息 ===")
print(f"连接客户端数: {len(self.clients)}")
for i, (sock, addr, thread) in enumerate(self.clients):
status = "活跃" if sock.fileno() != -1 else "断开"
print(f"客户端 {i+1}: {addr} - {status}")
print("================\n")
def remove_client(self, client_socket):
"""移除客户端"""
self.clients = [(s, a, t) for s, a, t in self.clients if s != client_socket]
def stop_server(self):
"""停止服务器"""
self.running = False
if self.socket:
self.socket.close()
for client_socket, _, _ in self.clients:
client_socket.close()
cv2.destroyAllWindows()
print("🛑 服务器已停止")
if __name__ == "__main__":
# 配置服务器
HOST = '0.0.0.0' # 监听所有网络接口
PORT = 8081
server = TCPCameraServer(HOST, PORT)
try:
server.start_server()
except KeyboardInterrupt:
print("\n👋 用户中断")
finally:
server.stop_server()4:测试结果 如果对你又帮助,麻烦点个赞,加个关注
晚上测试 角度 没设置好,由点曝光
