E/E 架构的演进路线图
汽车电子电气架构(E/E 架构)的演进,本质上是一场算力与数据流的重组运动。它遵循着从"无序到有序"、"从分散到集中"、"从硬件主导到软件定义"的历史必然规律。
1.1 演进路线图:从"诸侯割据"到"中央集权"
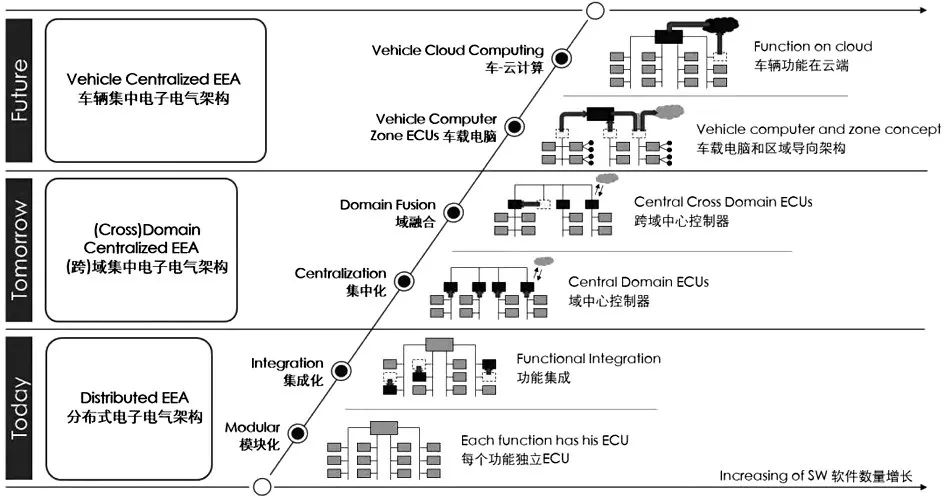
博世(Bosch)曾发布过一张经典的架构演进图,将其划分为三个大阶段、六个小步骤。为了便于理解,我们将其提炼为四个关键里程碑:
第一阶段:分布式架构 (Distributed Architecture) ------ 模块化起步
- 特征 :"一个功能 = 一个盒子(ECU)"。
- 逻辑:如果你想加个自动雨刮,就加一个雨刮控制器;想加个电动座椅,就加个座椅控制器。ECU 之间通过低速 CAN 总线点对点通信。
- 状态:传统的燃油车大多处于此阶段。整车 ECU 数量极多(70-100+),且来自数十个不同的 Tier 1 供应商。
第二阶段:域集中架构 (Domain Centralized) ------ 功能整合
- 特征 :"按功能归类"。
- 逻辑 :将功能相似的 ECU 整合到一个算力更强的域控制器 (DCU, Domain Control Unit) 中。行业公认的**"博世五大域"**划分标准确立:
- 动力域 (Powertrain):发动机、变速箱、电池、电机。
- 底盘域 (Chassis):制动、转向、悬架。
- 车身域 (Body):车窗、车灯、门锁、空调。
- 座舱域 (Cockpit):仪表、中控、娱乐、HUD。
- 智驾域 (ADAS/AD):感知、规划、决策。
- 状态:目前主流的新能源车型(如小鹏 P7、蔚来 ET7 等)处于此阶段。以太网开始引入,但 CAN 依然是主力。
第三阶段:跨域融合 (Cross-Domain Fusion) ------ 边界打破
- 特征 :"域控制器之间的合并"。
- 逻辑 :随着芯片算力(如高通 8295、Orin-X)的过剩,一个芯片可以干两个域的活。
- 舱泊一体:座舱芯片算力闲置时,负责自动泊车。
- 行泊一体:低速泊车和高速行车共用一套智驾域控。
- 驾驶与底盘融合:智驾域直接接管底盘控制,减少通信延迟。
- 状态:2023-2025 年量产车型的热门架构(如理想 L9、小米 SU7 等)。
第四阶段:中央计算 + 区域控制 (Central & Zonal) ------ 终极形态
- 特征 :"物理位置决定一切"。
- 逻辑 :这是特斯拉 Model 3/Y 及 Cybertruck 引领的方向,也是 SDV(软件定义汽车)的物理基础。
- 中央计算 (Central Compute):全车只有 1 个(或 2 个互为冗余)超级大脑,负责所有逻辑运算、决策和数据处理。
- 区域控制 (Zonal Control) :全车划分为 4 个(或更多)物理区域(如左前、右前、左后、右后)。区域控制器 (ZCU) 就近连接该区域内的所有传感器和执行器(无论是车灯、雷达还是门锁),它不负责思考,只负责供电和透传数据。
- 状态:下一代架构的圣杯,目前仅少数先锋车企实现量产,是未来 5-10 年的主流方向。
1.2 分布式架构的终结:CAN 总线与 100+ ECU 的"维护地狱"
为什么分布式架构必须死?因为在智能电动车时代,它已经成为了创新的最大阻碍。这不仅仅是技术问题,更是供应链和成本的灾难。
痛点一:100+ ECU 的"维护地狱" (Integration Hell)
在分布式架构下,一辆豪华车可能有超过 100 个 ECU,分别来自博世、大陆、电装、采埃孚等不同供应商。每个 ECU 都是一个**"黑盒子"**。
-
软硬绑定的死局:
- 传统的 ECU 是软硬件打包卖的。如果你想修改雨刮的刮刷逻辑(比如增加一个"雪天模式"),你不能直接改代码,你必须发邮件给供应商,让供应商修改固件,重新验证,再发给你。这个周期可能长达 6 个月,且需要支付昂贵的开发费(NRE)。
- 后果:整车厂(OEM)失去了对车辆灵魂的控制权,OTA(空中升级)几乎不可能深入到执行器层面。
-
代码集成的噩梦:
- 100 个盒子,就有 100 种不同的底层软件架构、100 种私有协议。将它们凑在一起工作,需要进行天文数字级别的集成测试。
- 这就好比让 100 个讲不同方言的人在一个房间里协同工作,光是翻译(网关协议转换)就消耗了大量资源,且极易出错。
-
供应链管理的灾难:
- 缺芯潮(Chip Shortage)期间,缺一颗几块钱的座椅控制 MCU,整车就无法下线。ECU 数量越多,供应链的"短板效应"越明显,风险越高。
痛点二:CAN 总线的带宽瓶颈
CAN (Controller Area Network) 总线是上个世纪 80 年代的产物,虽然它稳定可靠,但在大数据时代已显老态龙钟。
-
带宽不足:
- 传统 CAN 的速率仅为 500 kbps ,升级版的 CAN-FD 也仅为 2-5 Mbps。
- 对比需求 :一颗 800 万像素摄像头的数据量是 1-2 Gbps ;一颗激光雷达是 500 Mbps。
- 后果:CAN 总线就像乡村土路,根本跑不动自动驾驶的法拉利。如果不换架构,所有的高阶传感器数据都无法汇聚。
-
实时性与抖动:
- CAN 采用"仲裁机制"(谁优先级高谁先说话),在总线负载率高(>40%)时,低优先级的信号会被延迟发送。
- 对于自动驾驶的刹车和转向控制,这种**随机的延迟(Jitter)**是致命的。我们需要的是确定性的通信(引出后文的 TSN)。
痛点三:线束"巨蛇"的重量
在分布式架构中,所有的信号线都是**"点对点"或"星型发散"**的。
- 现象 :为了连接 100 个 ECU 和数百个传感器,车内线束总长度可达 4-6 公里 ,重量高达 50-80 公斤。
- 影响 :
- 增重:线束是仅次于发动机和底盘的第三重部件,直接影响电动车的续航里程。
- 装配难:线束像一条巨蛇盘踞在车身内部,主要靠人工安装,自动化率极低,且一旦装错极难排查。
- 成本高:铜价上涨导致线束成本居高不下。
结论 :
分布式架构是机械时代的产物,它追求的是**"功能的叠加";而智能时代追求的是 "能力的融合"。为了实现软件定义汽车,必须打碎这 100 个黑盒子,用 中央计算重塑大脑,用 以太网重塑神经,用区域架构**重塑骨骼。
1.3 域控中间态:五大域的划分逻辑与"数据孤岛"困局
为了解决分布式架构中 ECU 数量爆炸和软件无法迭代的问题,博世(Bosch)等 Tier 1 巨头率先提出了"域"(Domain)的概念。其核心思想是:将功能相近的 ECU 整合,由一个算力较强的域控制器 (DCU) 统一管理。
这就像把 100 个散兵游勇,整编成了 5 个集团军。
1. 五大功能域的划分逻辑
目前行业公认的经典划分方式是**"五大域"**。这种划分并非随意为之,而是基于功能属性、实时性要求和安全等级的差异。
(1) 动力域 (Powertrain Domain)
- 管辖范围:发动机/电机、变速箱、电池管理 (BMS)、车载充电机 (OBC)。
- 特性 :高安全等级 (ASIL-C/D),极高的实时性要求。
- 逻辑:这是汽车的心脏。无论是燃油还是电动,动力输出的策略优化(如扭矩分配、能量回收)都需要在毫秒级内闭环,必须集中管理。
(2) 底盘域 (Chassis Domain)
- 管辖范围:制动系统 (ESP/iBooster)、转向系统 (EPS)、悬架系统 (CDC/空气悬架)。
- 特性 :最高安全等级 (ASIL-D),容错率极低。
- 逻辑:这是汽车的小脑。随着线控底盘技术的发展,底盘域正逐渐与智驾域产生深度耦合(例如:自动驾驶发出的"左转"指令,需要底盘域精准执行)。
(3) 车身域 (Body Domain)
- 管辖范围:车灯、门锁、车窗、雨刮、电动尾门、座椅调节、空调风门。
- 特性 :低安全等级 (ASIL-B/QM),功能繁杂,逻辑简单。
- 逻辑:这是汽车的躯干。车身域是目前集成度最高的部分,很多车企已经将 BCM (车身控制器) 与网关集成,形成了 BGM (Body Gateway Module)。
(4) 智能座舱域 (Smart Cockpit Domain)
- 管辖范围:仪表盘、中控大屏、副驾屏、HUD、流媒体后视镜、T-Box、DMS 摄像头。
- 特性 :注重用户体验,高算力需求,迭代速度快(向消费电子看齐)。
- 逻辑:这是汽车的脸面。传统的仪表和娱乐系统分离,现在通过 Hypervisor 技术,用一颗 SoC (如 8155/8295) 就能驱动多块屏幕,实现"一芯多屏"。
(5) 自动驾驶域 (ADAS/AD Domain)
- 管辖范围:摄像头、毫米波雷达、激光雷达、高精定位。
- 特性 :海量数据吞吐,极高 AI 算力需求。
- 逻辑:这是汽车的大脑。它负责处理感知数据,进行规划决策,是整车算力的巅峰。
2. "数据孤岛" (Data Silo) 问题:域控架构的阿喀琉斯之踵
虽然域控架构大大减少了 ECU 数量,但它引入了一个新的、棘手的问题:域与域之间的隔离。
每个域控制器就像一个独立的"信息烟囱",它们内部通信很快,但跨域通信却很慢且复杂。
痛点一:跨域功能开发极难
想象一个典型的智能化场景------"迎宾模式":
当车主走近车辆,车灯闪烁(车身域),门把手弹出(车身域),座椅自动后退(车身域),中控屏播放欢迎动画(座舱域),底盘悬架降低以便上车(底盘域)。
- 现状:要实现这个功能,需要协调 3 个域控制器。开发者需要在车身域写代码,在座舱域写代码,在底盘域写代码,还要定义复杂的跨域通讯协议。
- 后果:开发链条极长,联调困难,任何一个域的响应延迟都会导致体验割裂(比如人坐进去了,座椅还没退到位)。
痛点二:算力与传感器无法复用
- 传感器浪费 :
- 座舱域有一个摄像头看驾驶员是否疲劳 (DMS)。
- 智驾域也有摄像头看路。
- 但智驾域很难借用座舱域的摄像头数据来辅助判断(例如结合驾驶员视线和路况判断变道意图),因为视频流数据量太大,跨域传输带宽不足。
- 算力闲置 :
- 在高速公路上开 ACC 时,座舱芯片(8155)可能在摸鱼(只显示导航)。
- 在自动泊车时,智驾芯片(Orin)可能火力全开,但座舱芯片依然在摸鱼。
- 后果:由于算力是物理隔离的,无法像云计算那样"弹性调度",导致硬件成本的巨大浪费。
痛点三:线束依然繁杂
虽然域内线束减少了,但传感器和执行器依然是**"功能导向布线"**。
- 例子:位于车尾的倒车雷达(智驾域)和位于车尾的电动尾门(车身域),虽然物理上靠得很近,但它们的线束必须分别绕过整个车身,分别连接到位于车头的智驾域控和车身域控。
- 后果:线束长度并未达到最优解,依然存在大量的"折返跑"布线。
结论 :
域控架构虽然解决了"乱"的问题,但没有彻底解决"通"的问题。为了打破这些无形的墙,我们需要进一步打破功能的边界,按物理位置 重新架构------这就是下一章 Zonal (区域) 架构 诞生的原动力。
1.4 跨域融合:打破边界的逻辑与新问题
当芯片算力(尤其是 SoC)开始过剩,而跨域通信带宽成为瓶颈时,工程师们自然会想到:为什么不把两个关系好的域控制器合并成一个?
1. 融合的底层逻辑:效率至上
跨域融合的核心驱动力是降本(Cost Down)和提效(Efficiency Up)。
(1) 物理集成 (Physical Integration) ------ 省钱
- 做法:把两块 PCB 板塞进一个铁盒子里,共用散热器、外壳、供电模块,甚至共用一颗 MCU 做安全监控。
- 收益 :
- BOM 成本降低:少了一个盒子、少了一套接插件、少了一套线束插头。
- 重量减轻:对于电动车来说,减重就是加续航。
(2) 算力共享 (Compute Sharing) ------ 榨干芯片
- 背景:座舱芯片(如 8295)的 NPU 算力达到了 30 TOPS,而泊车功能只需要 10-20 TOPS。
- 做法:在座舱芯片空闲时(比如泊车时,用户不玩游戏),分出一部分算力给智驾算法。
- 收益:省掉了一颗独立的泊车芯片(如 TDA4),直接省下几百块成本。
(3) 通信优化 (Communication Optimization) ------ 降延迟
- 背景:智驾域需要控制底盘域(转向/刹车)。如果两个域分开,信号要走:智驾 SoC -> 智驾 MCU -> 以太网/CAN -> 网关 -> 底盘 MCU。链路长,延迟大。
- 做法:智驾与底盘融合。信号直接在板内通过 SPI/PCIe 传输,或者在同一颗 MCU 内部通过内存拷贝传输。
- 收益:控制延迟从 10ms 级降低到 us 级,车辆操控更精准。
2. 三大主流融合路径
目前行业内最典型的三种跨域融合形态:
(1) 舱泊一体 (Cockpit-Parking Integration)
- 融合对象 :智能座舱域 + 自动泊车 (APA)。
- 逻辑:泊车是低速场景,安全性要求相对高速智驾低,且泊车时需要调用座舱的 360 环视摄像头和屏幕显示。两者数据源高度重合。
- 代表方案:基于高通 8155/8295 单芯片方案。
- 状态:已大规模量产,成为中低端车型的标配。
(2) 行泊一体 (Driving-Parking Integration)
- 融合对象 :高速行车 (L2+) + 低速泊车。
- 逻辑:以前行车用 Mobileye(封闭黑盒),泊车用别的芯片。现在为了降本,用一颗大算力芯片(如 Orin-X 或地平线 J5)统吃行车和泊车,传感器分时复用。
- 状态:目前智驾领域的主流方案。
(3) 驾舱融合 (Driving-Cockpit Fusion) ------ 真正的硬骨头
- 融合对象 :智能座舱 + 智能驾驶。
- 逻辑:这是通往中央计算的必经之路。将全车最贵的两颗芯片(座舱 SoC 和智驾 SoC)放在一起,甚至合并为一颗超级芯片(如 NVIDIA Thor)。
- 挑战:这也是目前争议最大、技术难度最高的方向。
3. 跨域融合带来的新问题:牵一发而动全身
虽然融合看起来很美,但在工程落地时,车企和 Tier 1 遭遇了前所未有的挑战。
问题一:开发架构的撕裂 (Organizational Silo)
- 康威定律 :软件架构反映了组织架构。
- 现状:车企内部通常有"座舱部"和"智驾部",这是两个庞大的、独立的部门,甚至汇报给不同的副总裁。
- 冲突:现在要做"舱驾融合",这块板子归谁管?操作系统选谁的?资源(内存/带宽)怎么分?
- 结果:技术融合了,但人没融合。大量的内耗导致项目延期。很多车企被迫成立"数字化中心"或"软件中心"来统筹。
问题二:混合临界安全 (Mixed-Criticality Safety)
- 本质矛盾 :
- 座舱 (Android):追求快、炫、新。死机了重启就行,那是 QM (质量管理) 等级。
- 智驾 (RTOS/QNX):追求稳、准、狠。死机了会死人,那是 ASIL-D 等级。
- 挑战:当两者跑在同一块板子甚至同一颗芯片上时,如何保证 Android 的崩溃绝对不会影响刹车任务?
- 解法 :必须引入极其复杂的 Hypervisor (虚拟化) 和 硬件隔离 (Firewall) 技术,开发难度指数级上升。
问题三:供应链的重新洗牌
- 旧模式:买博世的底盘、买伟世通的座舱、买德赛的智驾,回来组装。
- 新模式:融合控制器太复杂,没有一家传统供应商能单独搞定。
- 趋势 :
- 车企自研:为了掌控灵魂,车企开始自己画板子,自己写底层软件。
- Tier 0.5 出现:像大疆、华为这种能提供全栈能力的供应商变得强势,传统 Tier 1 被边缘化为代工厂。
结论 :
跨域融合是通往终极架构的**"练兵场"**。它迫使车企在组织架构、软件能力和供应链管理上进行深刻变革。只有跨过了这道坎,才有可能驾驭真正的 中央计算 + Zonal 架构。
1.5 终极形态:中央计算 + 区域控制 (Central & Zonal)
如果我们把汽车比作一个人,那么:
- 分布式架构是"单细胞生物"的集合,每个细胞自己管自己。
- 域控架构是"无脊椎动物",有几个神经节分别管手和脚,但不够协调。
- 中央+区域架构则是"脊椎动物",有一个发达的大脑(中央计算)和分布在四肢的神经末梢(区域控制)。
这一架构的核心革命在于:彻底解耦了"物理连接"与"逻辑控制"。
1. 物理分区:ZCU (Zone Control Unit) ------ 汽车的"神经末梢"
在 Zonal 架构下,我们不再问"这个控制器管什么功能?",而是问"这个控制器在哪里?"。
(1) 划分原则:位置优先 (Location-Based)
全车通常被划分为 4 个(或更多)物理区域,每个区域部署一个 ZCU (区域控制器):
- 左前区 (Front-Left Zone):位于左前轮眉或 A 柱附近。
- 右前区 (Front-Right Zone):位于右前轮眉或 A 柱附近。
- 左后区 (Rear-Left Zone):位于左后轮眉或 C 柱附近。
- 右后区 (Rear-Right Zone):位于右后轮眉或 C 柱附近。
(2) ZCU 的职责:全能的"搬运工"
ZCU 是一个标准的**"混合信号处理中心"**,它干三件事:
- I/O 代理 (I/O Aggregator) :
- 该区域内的所有设备(左大灯、左前雷达、左前门锁、左前车窗电机、左前空调风门等),不管它是属于车身域还是智驾域,统统就近接入这个 ZCU。
- 线束革命:这消灭了跨越全车的长线束。左大灯的线只需要 0.5 米接到左前 ZCU,而不需要 4 米接到车身控制器。
- 电源分配 (Power Distribution) :
- ZCU 还是该区域的智能配电盒。它通过内部的 eFuse (电子保险丝) 给上述设备供电,并监控电流健康状态。
- 协议转换 (Gateway) :
- 它将传感器发来的 CAN/LIN 信号,打包成以太网数据包,通过一根高速光纤/网线,扔给中央大脑。它不处理业务逻辑,只做透传。
2. 逻辑集中:中央大脑 (Central Compute) ------ 汽车的"灵魂"
当所有的传感器和执行器都接入 ZCU 后,它们就变成了没有思想的"手脚"。所有的思考,都汇聚到了中央计算单元 (CCU - Central Compute Unit)。
(1) "上帝视角"的控制
在中央大脑中,软件不再被一个个 ECU 的硬件围墙隔开,而是运行在一个统一的操作系统之上。
- 跨域协同变得无比简单 :
-
以前的"迎宾模式"需要协调 3 个控制器。
-
现在的代码可能就是两行: Python
if (User.Approach()): ZoneFL.Door.Open(); // 调用左前区域的车门服务 ZoneFL.Seat.MoveBack(); // 调用左前区域的座椅服务 Cockpit.Screen.PlayAnimation(); -
所有硬件资源都在一个资源池里,开发者可以像写手机 App 一样调用全车能力。
-
(2) 传感器与执行器的"哑巴化"
这是 Zonal 架构最激进的一步。
- 旧模式:智能雨刮器里有个 MCU,它决定什么时候刮。
- 新模式:雨刮器电机只是一块磁铁和线圈。中央大脑通过视觉算法判断雨量,计算出最佳刮刷频率,直接发指令给 ZCU,ZCU 输出 PWM 波驱动电机。
- 意义 :
- OTA 能力质变:如果我想优化雨刮的刮刷节奏(比如增加"渐进式启动"),我只需要升级中央大脑的一行代码,而不需要去刷雨刮电机的固件(这在以前几乎是不可能的)。
- 成本转移:把分散在 100 个末端设备的 MCU 成本砍掉,集中投入到中央大脑的高性能芯片上。
3. Zonal 架构的"一增一减"
减法:线束与装配
- 线束长度:从 4-6km 减少到 <1.5km(Tesla Model Y 实测)。
- 线束重量:减少 50% 以上。
- 装配自动化:线束结构变简单了,机器人可以代替人工进行自动化装配(这正是马斯克推崇的 Alien Dreadnought 工厂理念)。
增法:通信与算力
- 通信压力 :所有的原始数据(Raw Data)都要传给中央,对骨干网带宽要求极高。这直接催生了 10G 车载以太网 和 TSN 的需求。
- 算力压力 :中央大脑一旦死机,全车瘫痪。因此,中央大脑必须具备极高的算力冗余 和双机热备机制。
结论 :
中央计算 + 区域控制架构,是软件定义汽车 (SDV) 的物理容器。没有这个架构,所谓的 SDV 只是空中楼阁;有了这个架构,汽车才真正拥有了进化的肉体。
1.6 区域控制器 (ZCU) 详解:全能的"边缘管家"
在传统的汽车架构中,我们习惯了 BCM(车身控制器)、门模块、空调控制器。但在 Zonal 架构中,这些名字都将消失,取而代之的是 ZCU-FL (左前) 、ZCU-FR (右前) 、ZCU-RL (左后) 、ZCU-RR (右后)。
ZCU 的设计哲学只有一条:位置即正义。
1. 物理定义:打破功能的结界
(1) 按位置划分 (Location-Based)
ZCU 的部署完全取决于物理拓扑,而非功能属性。
- 例子 :
- 左前 ZCU (Zone-FL) 可能连接了:左大灯(车身域)、左前轮转速传感器(底盘域)、左前毫米波雷达(智驾域)、前雨刮电机(车身域)、冷却液泵(动力域)。
- 在以前,这 5 个零件分别连到 5 个不同的控制器。现在,因为它们物理上都离"左前轮眉"最近,所以统统插在 Zone-FL 上。
- 收益 :
- 就近接入:传感器到控制器的线束长度被压缩到极致(通常 < 1米)。
- 接插件标准化:全车 4 个 ZCU 的硬件设计可以是完全一样的(通过软件配置区分),极大降低了供应链管理的复杂度。
2. 功能定义:三位一体的角色
ZCU 不是一个简单的接线板,它是一个高集成度的智能节点,承担着三大核心职责。
(1) 角色一:电源中心 (Power Hub) ------ 智能配电
ZCU 是该区域的"电力心脏"。它直接从蓄电池/DCDC 取电,然后分配给挂在它下面的几十个负载。
- 去保险丝化 (eFuse) :
- ZCU 内部集成了数十个 HSD (高边驱动/智能功率开关) 芯片,也就是 eFuse。
- 可编程保护:我们可以通过软件设定每个接口的熔断电流。例如,给大灯的接口限流 5A,给雷达的接口限流 1A。
- 故障隔离:如果左大灯短路了,ZCU 会微秒级切断大灯供电,并上报给中央大脑,而不会影响插在旁边的雷达。
- 能耗管理:当车辆进入"哨兵模式"且电量低时,中央大脑发令,ZCU 可以切断除摄像头以外所有非必要负载的电源。
(2) 角色二:数据网关 (Data Gateway) ------ 协议转换
ZCU 下面挂的设备五花八门,通信协议各不相同。ZCU 的任务是将这些"方言"翻译成"普通话"。
- 下行接口 (Downlink) :
- CAN/CAN-FD:连接雷达、传统 ECU。
- LIN:连接车窗、氛围灯、雨量感应器。
- A2B:连接麦克风、扬声器。
- Analog/Digital I/O:采集温度传感器电压、读取开关状态。
- 上行接口 (Uplink) :
- 车载以太网 (1000Base-T1 / 10G-T1)。
- 工作流:ZCU 收到 LIN 总线上的"车窗位置"信号 -> 封装成以太网 UDP/SOMEIP 包 -> 通过骨干网发送给中央大脑。反之亦然。
(3) 角色三:I/O 代理 (I/O Proxy) ------ 边缘驱动
ZCU 还需要具备一定的驱动能力,直接控制那些"哑巴"执行器。
- H 桥驱动:ZCU 内部集成 H 桥电路,直接输出大电流驱动车窗升降电机、后视镜折叠电机。
- PWM 生成:中央大脑只发指令"LED 亮度 50%",ZCU 负责生成对应的 PWM 波形来点亮氛围灯。
- 实时性补救 :
- 虽然逻辑上收了,但某些极高实时性的功能(如防夹手算法),可能会保留在 ZCU 本地执行,以避免来回传输的时延造成夹伤。这就是**"边缘计算"**在 ZCU 上的体现。
3. ZCU 的硬件形态
一个典型的 ZCU 硬件架构通常包含:
- 主控 SoC/MCU :通常选用 Infineon Aurix TC3xx/TC4xx 或 NXP S32Z/E 系列。
- 要求:高算力(处理协议转换)、高实时性、高功能安全 (ASIL-D)。
- 以太网 Switch:用于连接骨干网和其他 ZCU(环网冗余)。
- 功率级 (Power Stage):密密麻麻的 eFuse 芯片和电机驱动芯片,占据了 PCB 板 60% 的面积。
结论 :
ZCU 是 Zonal 架构的基石。它让上层的中央大脑可以从繁琐的硬件细节中解脱出来,专注于业务逻辑;同时它接管了底层的脏活累活(配电、驱动、协议转换),实现了软硬解耦的物理隔离。