7.3直接法激光雷达里程计
之前的点到点ICP、点到线ICP、点到面ICP、NDT是配准两个点云的。在3D SLAM中,点云之间可以很容易地进行合并,也可以将过去一段时间内的点云组成一个局部地图,然后将当前帧和这个局部地图进行配准。这种不需要提取特征的激光雷达里程计被称为激光雷达里程计。根据使用的配准方法不同,可以写成两种实现激光雷达里程计的思路。
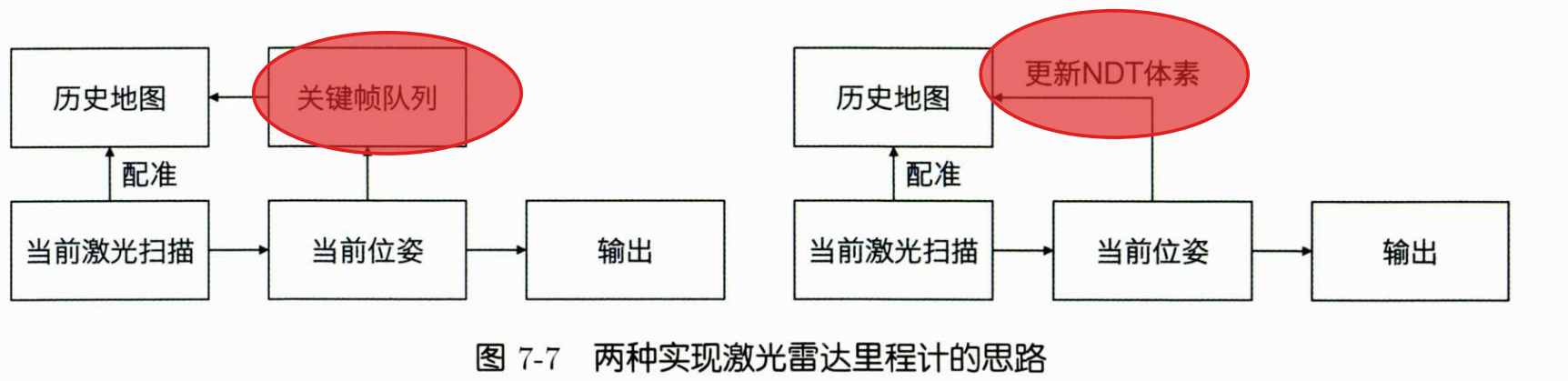
也可不必把过去的点云拼在一起形成局部地图,而是把配准好的点云更新到NDT的每个体素内部,更新它们的高斯分布情况,再做下一步的配准。这种思路被称为增量式NDT。
7.3.1使用NDT构建激光雷达里程计
这个里程计维护一个由多个Scan组成的局部地图,然后把他们拼在一起。调用NDT配准来求解当前帧的位姿。核心目标是通过维护有限数量关键帧组成的局部地图,利用NDT(正态分布变换)配准逐帧估计激光帧的世界坐标。
第一步为添加当前帧 ,若当前帧为第一帧是就初始化局部地图,将位姿设为原点;若不就可进行NDT配准,估计当前帧位姿,若为关键帧(仅当当前帧与上一关键帧的相对运动超过阈值时,才将当前帧标记为关键帧,平移阈值:相对平移距离 > 设定值(如 0.5 米),旋转阈值:相对旋转角度(转弧度后)> 设定值(如 30 度))更新关键帧队列,将关键帧点云转换到世界坐标系后,存入双端队列,:若缓存的关键帧数量超过设定上限(如 30 个),每次新增关键帧后,拼接队列中所有关键帧的世界坐标系点云,将重建后的局部地图设为 NDT 配准的 "目标点云",为后续帧配准做准备。
第二步为在NDT配准中 首先进行目标点云配置 ,当前帧原始激光点云为源点云(传感器坐标系),局部地图(关键帧拼接的世界坐标系点云)为目标点云,重建局部地图,更新NDT目标点云。之后进行初始位姿猜测 ,前 2 帧:无运动历史,以单位矩阵(世界坐标系原点)作为初始猜测;2 帧后:基于前两帧的位姿趋势推断(当前猜测 = 上一帧位姿 × 上两帧的相对运动),减少 NDT 迭代次数,提升鲁棒性。**之后进行配准执行,**传入初始猜测,执行配准,提取最终变换矩阵转换为 SE3 位姿。
第三步为坐标系转换(传感器系→世界系) 每帧配准得到位姿后,通过pcl::transformPointCloud将当前帧点云从传感器坐标系转换到世界坐标系;所有关键帧均以世界坐标系存储,保证局部地图的配准基准统一
代码:
cpp
、/**
* @brief 基于直接NDT(正态分布变换)递推的激光里程计(Lidar Odometry)
* @note 核心逻辑:维护由历史关键帧组成的局部地图,将当前帧与局部地图做NDT配准以估计位姿;
* 关键帧根据运动距离/角度阈值判定,局部地图仅保留最近N个关键帧
*/
class DirectNDTLO {
public:
/**
* @brief 激光里程计配置参数结构体
*/
struct Options {
Options() {}
double kf_distance_ = 0.5; // 关键帧判定的平移阈值(米)
double kf_angle_deg_ = 30; // 关键帧判定的旋转角度阈值(度)
int num_kfs_in_local_map_ = 30; // 局部地图保留的最大关键帧数量
bool use_pcl_ndt_ = true; // NDT实现选择:true=PCL库NDT,false=自定义Ndt3d
bool display_realtime_cloud_ = true; // 是否启用实时点云可视化
Ndt3d::Options ndt3d_options_; // 自定义Ndt3d的配置参数
};
/**
* @brief 构造函数
* @param options 配置参数(默认值见Options结构体)
*/
DirectNDTLO(Options options = Options()) : options_(options) {
// 初始化实时可视化器(如果启用)
if (options_.display_realtime_cloud_) {
viewer_ = std::make_shared<PCLMapViewer>(0.5); // 0.5为可视化更新频率
}
// 初始化自定义Ndt3d
ndt_ = Ndt3d(options_.ndt3d_options_);
// 初始化PCL NDT参数(固定值,也可放入Options)
ndt_pcl_.setResolution(1.0); // NDT体素网格分辨率(米)
ndt_pcl_.setStepSize(0.1); // 优化步长
ndt_pcl_.setTransformationEpsilon(0.01); // 收敛阈值(两次变换矩阵的差值小于该值则收敛)
}
/**
* @brief 向里程计添加一帧激光点云,核心入口函数
* @param scan 当前帧原始点云(传感器坐标系)
* @param pose 输出参数:当前帧的世界坐标系位姿(由NDT配准估计)
*/
void AddCloud(CloudPtr scan, SE3& pose);
/// 存储地图(viewer中的点云)到文件(声明未实现)
void SaveMap(const std::string& map_path);
private:
/**
* @brief 将当前帧与局部地图做NDT配准,估计当前帧位姿
* @param scan 当前帧原始点云
* @return 当前帧的世界坐标系位姿估计值
*/
SE3 AlignWithLocalMap(CloudPtr scan);
/**
* @brief 判断当前帧是否为关键帧
* @param current_pose 当前帧的世界坐标系位姿
* @return true=是关键帧,false=非关键帧
*/
bool IsKeyframe(const SE3& current_pose);
private:
Options options_; // 配置参数
CloudPtr local_map_ = nullptr; // 局部地图点云(由关键帧拼接而成)
std::deque<CloudPtr> scans_in_local_map_; // 局部地图中的关键帧点云(世界坐标系)
std::vector<SE3> estimated_poses_; // 所有帧的位姿估计结果(用于轨迹记录和位姿猜测)
SE3 last_kf_pose_; // 上一个关键帧的位姿(用于关键帧判定)
// PCL库的NDT配准器
pcl::NormalDistributionsTransform<PointType, PointType> ndt_pcl_;
// 自定义的3D NDT配准器
Ndt3d ndt_;
// 实时点云可视化器
std::shared_ptr<PCLMapViewer> viewer_ = nullptr;
};
/**
* @brief 实现AddCloud:处理当前帧点云,完成配准、关键帧判定、局部地图更新
*/
void DirectNDTLO::AddCloud(CloudPtr scan, SE3& pose) {
// 处理第一帧点云:无局部地图,直接作为初始局部地图
if (local_map_ == nullptr) {
local_map_.reset(new PointCloudType);
*local_map_ += *scan; // 拼接点云(第一帧即为局部地图)
pose = SE3(); // 第一帧位姿设为世界坐标系原点
last_kf_pose_ = pose; // 第一帧作为第一个关键帧
// 设置NDT的目标点云(局部地图)
if (options_.use_pcl_ndt_) {
ndt_pcl_.setInputTarget(local_map_);
} else {
ndt_.SetTarget(local_map_);
}
return;
}
// 非第一帧:与局部地图做NDT配准,估计当前帧位姿
pose = AlignWithLocalMap(scan);
// 将当前帧点云从传感器坐标系转换到世界坐标系
CloudPtr scan_world(new PointCloudType);
pcl::transformPointCloud(*scan, *scan_world, pose.matrix().cast<float>());
// 判断是否为关键帧:若是则更新局部地图
if (IsKeyframe(pose)) {
last_kf_pose_ = pose; // 更新上一关键帧位姿
// 将当前关键帧(世界坐标系)加入局部地图缓存
scans_in_local_map_.emplace_back(scan_world);
// 若关键帧数量超过阈值,移除最早的关键帧(滑动窗口)
if (scans_in_local_map_.size() > options_.num_kfs_in_local_map_) {
scans_in_local_map_.pop_front();
}
// 重建局部地图:拼接所有缓存的关键帧点云
local_map_.reset(new PointCloudType);
for (auto& kf_scan : scans_in_local_map_) {
*local_map_ += *kf_scan;
}
// 更新NDT的目标点云(新的局部地图)
if (options_.use_pcl_ndt_) {
ndt_pcl_.setInputTarget(local_map_);
} else {
ndt_.SetTarget(local_map_);
}
}
// 实时可视化:更新位姿和点云
if (viewer_ != nullptr) {
viewer_->SetPoseAndCloud(pose, scan_world);
}
}
/**
* @brief 实现IsKeyframe:基于与上一关键帧的相对运动判定关键帧
* @note 平移距离超过kf_distance_ 或 旋转角度超过kf_angle_deg_ 则判定为关键帧
*/
bool DirectNDTLO::IsKeyframe(const SE3& current_pose) {
// 计算当前帧与上一关键帧的相对位姿
SE3 delta = last_kf_pose_.inverse() * current_pose;
// 平移阈值判定:平移向量的模长
bool trans_condition = delta.translation().norm() > options_.kf_distance_;
// 旋转阈值判定:旋转向量(so3对数映射)的模长(转弧度)
bool rot_condition = delta.so3().log().norm() > options_.kf_angle_deg_ * math::kDEG2RAD;
return trans_condition || rot_condition;
}
/**
* @brief 实现AlignWithLocalMap:NDT配准核心逻辑,估计当前帧位姿
* @note 位姿猜测策略:
* 1. 前两帧未完成时:用单位矩阵作为初始猜测
* 2. 前两帧完成后:用前两帧的运动趋势推断当前帧初始猜测(运动模型)
*/
SE3 DirectNDTLO::AlignWithLocalMap(CloudPtr scan) {
// 设置NDT的源点云(当前帧)
if (options_.use_pcl_ndt_) {
ndt_pcl_.setInputSource(scan);
} else {
ndt_.SetSource(scan);
}
CloudPtr output(new PointCloudType()); // PCL NDT输出配准后的点云(未使用)
SE3 guess; // NDT配准的初始位姿猜测
bool align_success = true; // 自定义NDT的配准成功标志
// 分情况设置初始猜测并执行NDT配准
if (estimated_poses_.size() < 2) {
// 前两帧:无运动趋势,初始猜测为单位矩阵
if (options_.use_pcl_ndt_) {
// PCL NDT配准:输入初始猜测(单位矩阵),输出配准后点云
ndt_pcl_.align(*output, guess.matrix().cast<float>());
// 提取PCL NDT的最终变换矩阵,转换为SE3
guess = Mat4ToSE3(ndt_pcl_.getFinalTransformation().cast<double>().eval());
} else {
// 自定义NDT配准:传入初始猜测,输出配准后的位姿
align_success = ndt_.AlignNdt(guess);
}
} else {
// 前两帧已完成:用运动趋势推断初始猜测(简单运动模型:假设运动趋势延续)
SE3 T1 = estimated_poses_[estimated_poses_.size() - 1]; // 上一帧位姿
SE3 T2 = estimated_poses_[estimated_poses_.size() - 2]; // 上上帧位姿
guess = T1 * (T2.inverse() * T1); // 推断当前帧初始猜测:T1 * (T2到T1的相对运动)
if (options_.use_pcl_ndt_) {
ndt_pcl_.align(*output, guess.matrix().cast<float>());
guess = Mat4ToSE3(ndt_pcl_.getFinalTransformation().cast<double>().eval());
} else {
align_success = ndt_.AlignNdt(guess);
}
}
// 打印配准结果:平移向量 + 四元数(旋转)
LOG(INFO) << "pose: " << guess.translation().transpose() << ", "
<< guess.so3().unit_quaternion().coeffs().transpose();
// 打印PCL NDT的变换概率(配准可信度)
if (options_.use_pcl_ndt_) {
LOG(INFO) << "trans prob: " << ndt_pcl_.getTransformationProbability();
}
// 记录当前帧位姿估计结果(用于后续运动趋势推断)
estimated_poses_.emplace_back(guess);
return guess;
}
/**
* @brief 存储地图到文件(示例实现,可根据需求修改格式)
* @param map_path 地图保存路径(如.pcd文件)
*/
void DirectNDTLO::SaveMap(const std::string& map_path) {
if (local_map_ != nullptr && !local_map_->empty()) {
pcl::io::savePCDFileBinary(map_path, *local_map_);
LOG(INFO) << "Local map saved to: " << map_path;
} else {
LOG(WARNING) << "Local map is empty, save failed!";
}
}该激光里程计输出的局部地图 是滑动窗口式的、由最近 N 个关键帧拼接而成的世界坐标系点云集合,所有点云都在世界坐标系下。
代码核心思路:
1.整体
测试代码:
cpp
#include "rosbag_io/rosbag_io.h" // 假设包含RosbagIO类,用于读取rosbag
#include "direct_ndt_lo.h" // DirectNDTLO激光里程计类头文件
#include "common/timer.h" // 计时工具类
#include "common/cloud_utils.h" // 点云处理工具(如格式转换、下采样)
#include <gflags/gflags.h> // 命令行参数解析
#include <glog/logging.h> // 日志工具
/// 命令行参数定义(gflags)
/// 本程序以ULHK数据集为例,测试基于NDT的激光里程计(Lidar Odometry)
/// 若使用PCL NDT,会重新构建NDT的体素树
// rosbag文件路径(默认:ULHK数据集test2.bag)
DEFINE_string(bag_path, "./dataset/sad/ulhk/test2.bag", "path to rosbag");
// 数据集类型(支持NCLT/ULHK/KITTI/WXB_3D)
DEFINE_string(dataset_type, "ULHK", "NCLT/ULHK/KITTI/WXB_3D");
// 是否使用PCL库的NDT实现(false则用自定义Ndt3d)
DEFINE_bool(use_pcl_ndt, false, "use pcl ndt to align?");
// NDT邻域搜索类型:是否使用6邻域(false则用中心体素)
DEFINE_bool(use_ndt_nearby_6, false, "use ndt nearby 6?");
// 是否实时显示点云地图
DEFINE_bool(display_map, true, "display map?");
int main(int argc, char** argv) {
// 1. 初始化日志工具(GLOG)
google::InitGoogleLogging(argv[0]);
FLAGS_stderrthreshold = google::INFO; // 输出INFO及以上级别日志到stderr
FLAGS_colorlogtostderr = true; // 日志带颜色输出
// 解析命令行参数(gflags)
google::ParseCommandLineFlags(&argc, &argv, true);
// 2. 初始化Rosbag读取器:关联bag文件和数据集类型
// Str2DatasetType:字符串转数据集类型枚举,适配不同数据集的点云格式/话题
sad::RosbagIO rosbag_io(fLS::FLAGS_bag_path, sad::Str2DatasetType(FLAGS_dataset_type));
// 3. 配置DirectNDTLO激光里程计参数
sad::DirectNDTLO::Options options;
options.use_pcl_ndt_ = fLB::FLAGS_use_pcl_ndt; // 设置是否使用PCL NDT
// 设置NDT邻域搜索类型:6邻域/NDT中心体素
options.ndt3d_options_.nearby_type_ =
FLAGS_use_ndt_nearby_6 ? sad::Ndt3d::NearbyType::NEARBY6 : sad::Ndt3d::NearbyType::CENTER;
options.display_realtime_cloud_ = FLAGS_display_map; // 设置是否实时显示地图
// 初始化激光里程计实例
sad::DirectNDTLO ndt_lo(options);
// 4. 注册点云回调函数,逐帧处理rosbag中的点云
// AddAutoPointCloudHandle:自动匹配数据集对应的点云话题,注册处理函数
rosbag_io
.AddAutoPointCloudHandle([&ndt_lo](sensor_msgs::PointCloud2::Ptr msg) -> bool {
// 计时:统计单帧NDT配准耗时
sad::common::Timer::Evaluate(
[&]() {
// 步骤1:ROS点云格式(PointCloud2)转PCL点云格式,同时下采样(VoxelCloud)
// VoxelCloud:体素下采样,减少点云数量,提升配准效率
auto scan = sad::VoxelCloud(sad::PointCloud2ToCloudPtr(msg));
SE3 pose; // 存储当前帧估计的位姿
// 步骤2:将点云传入激光里程计,执行NDT配准,估计位姿
ndt_lo.AddCloud(scan, pose);
},
"NDT registration"); // 计时标签:NDT配准
return true; // 返回true表示继续处理下一针
})
.Go(); // 启动rosbag读取,逐帧执行回调函数
// 5. 若启用可视化,保存最终的局部地图到PCD文件
if (FLAGS_display_map) {
ndt_lo.SaveMap("./data/ch7/map.pcd");
}
// 6. 打印所有计时结果(如单帧NDT配准耗时、总耗时等)
sad::common::Timer::PrintAll();
LOG(INFO) << "done."; // 程序结束日志
return 0;
}该代码的关键在于NDT配准将处理后的点云传入DirectNDTLO,执行AddCloud完成:
- 与局部地图的 NDT 配准,估计当前帧位姿;
- 关键帧判定与局部地图更新;
- 实时可视化(启用)
之后保存地图。
7.3.2增量式NDT里程计
实现增量式NDT里程计会带来两个问题:一个是如何维护体素;二是每个体素内的高斯参数应该如何改变。
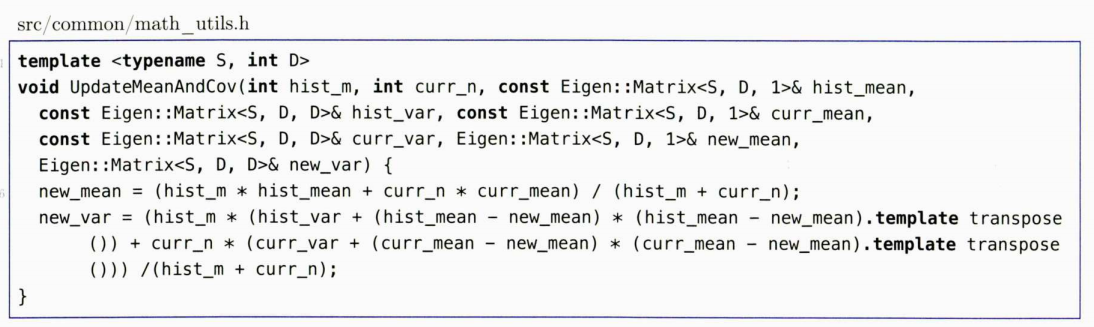
首先考虑高斯参数更新问题 ,设每个体素之前有m个历史点云,他们构成的高斯分布为,
。现在这里又增加了n个点,这n个点的均值和方差为
。设合并之后的估计为
,如何来表示他们之间的关系呢?


之后是体素的增量维护,我们需要维护一个近期使用的缓存机制。设置一个队列模型,把最近需要更新的体素放在最前面。当队列超出预期容量时,就删除最旧的那部分体素。
体素的增量维护代码实现:
cpp
/**
* @class IncNdt3d
* @brief 增量版本的3D NDT(正态分布变换)配准类
* @details 核心特性:
* 1. 内部维护增量式的体素(voxels),自动清理较旧的体素以节省内存
* 2. 向体素添加点云时,动态更新体素内点集的均值和协方差估计
* 3. 基于高斯牛顿法实现NDT配准,支持构建优化用的边(Edge)
*/
class IncNdt3d {
public:
/**
* @enum NearbyType
* @brief 配准时考虑的邻域体素类型
*/
enum class NearbyType {
CENTER, // 仅考虑目标点所在的中心体素
NEARBY6, // 考虑中心体素+6个邻接体素(上下/左右/前后)
};
/**
* @struct Options
* @brief NDT配准的参数配置结构体
*/
struct Options {
int max_iteration_ = 4; ///< 配准最大迭代次数(高斯牛顿)
double voxel_size_ = 1.0; ///< 体素大小(单位:米)
double inv_voxel_size_ = 1.0; ///< 体素大小的倒数(预计算以加速索引计算)
int min_effective_pts_ = 10; ///< 有效配准的最近邻点数阈值(低于此值则配准无效)
int min_pts_in_voxel_ = 5; ///< 每个体素计算NDT的最小点数(低于此值不估计均值/协方差)
int max_pts_in_voxel_ = 50; ///< 每个体素存储的最大点数(超过则不再添加,平衡精度与效率)
double eps_ = 1e-3; ///< 收敛判定阈值(位姿更新量小于此值则停止迭代)
double res_outlier_th_ = 5.0; ///< 残差异常值拒绝阈值(超过此值的残差不计入优化)
size_t capacity_ = 100000; ///< 缓存的体素最大数量(超过则删除最旧的体素)
NearbyType nearby_type_ = NearbyType::NEARBY6; ///< 邻域体素类型选择
};
using KeyType = Eigen::Matrix<int, 3, 1>; ///< 体素索引类型(3维整数向量,对应xyz方向的体素坐标)
/**
* @struct VoxelData
* @brief 单个体素的核心数据结构
* @details 存储体素内的点集、均值、协方差等信息,支持增量更新
*/
struct VoxelData {
/// @brief 默认构造函数(初始化空体素)
VoxelData() {}
/**
* @brief 带初始点的构造函数
* @param pt 初始加入体素的点(世界坐标系)
*/
VoxelData(const Vec3d& pt) {
pts_.emplace_back(pt); // 添加初始点
num_pts_ = 1; // 初始化点数为1
}
/**
* @brief 向体素添加单个点
* @param pt 待添加的点(世界坐标系)
* @details 仅当体素尚未估计NDT(均值/协方差)时,才更新点数;已估计则仅缓存点
*/
void AddPoint(const Vec3d& pt) {
pts_.emplace_back(pt);
if (!ndt_estimated_) { // 未估计NDT时才更新点数
num_pts_++;
}
}
std::vector<Vec3d> pts_; ///< 体素内存储的点集(世界坐标系)
Vec3d mu_ = Vec3d::Zero(); ///< 点集的均值(重心),初始化为零向量
Mat3d sigma_ = Mat3d::Zero(); ///< 点集的协方差矩阵,初始化为零矩阵
Mat3d info_ = Mat3d::Zero(); ///< 协方差矩阵的逆(信息矩阵),预计算以加速配准
bool ndt_estimated_ = false; ///< 标记:是否已估计该体素的均值和协方差
int num_pts_ = 0; ///< 体素内的总点数(用于判断是否满足NDT估计条件)
};
/**
* @brief 默认构造函数
* @details 使用默认参数配置,初始化体素大小倒数和邻域体素列表
*/
IncNdt3d() {
options_.inv_voxel_size_ = 1.0 / options_.voxel_size_;
GenerateNearbyGrids();
}
/**
* @brief 带参数的构造函数
* @param options 自定义的NDT配置参数
* @details 初始化参数配置、体素大小倒数和邻域体素列表
*/
IncNdt3d(Options options) : options_(options) {
options_.inv_voxel_size_ = 1.0 / options_.voxel_size_;
GenerateNearbyGrids();
}
/// @brief 获取当前维护的体素数量(统计信息)
/// @return 体素总数
int NumGrids() const { return grids_.size(); }
/**
* @brief 向增量体素中添加点云(世界坐标系)
* @param cloud_world 待添加的点云指针(世界坐标系)
* @details 核心逻辑:
* 1. 将点云分配到对应体素中
* 2. 自动清理超过容量的旧体素
* 3. 触发体素的均值/协方差更新(满足点数条件时)
*/
void AddCloud(CloudPtr cloud_world);
/**
* @brief 设置待配准的源点云(需要配准到目标体素地图的点云)
* @param source 源点云指针(局部坐标系)
*/
void SetSource(CloudPtr source) { source_ = source; }
/**
* @brief 使用高斯牛顿法执行NDT配准
* @param init_pose 配准初始位姿(输入);配准结果位姿(输出)
* @return 配准是否成功(true=成功,false=失败,如迭代不收敛/有效点数不足)
*/
bool AlignNdt(SE3& init_pose);
/**
* @brief 计算给定位姿下的残差和雅可比矩阵(符合IEKF公式)
* @param pose 当前估计的位姿(SE3)
* @param HTVH 输出:雅可比加权乘积矩阵(18x18,对应6DoF位姿的二阶信息)
* @param HTVr 输出:雅可比加权残差向量(18x1,对应6DoF位姿的一阶信息)
* @details 公式对应IEKF(迭代扩展卡尔曼滤波)的8.17和8.19式,用于高斯牛顿迭代更新
*/
void ComputeResidualAndJacobians(const SE3& pose, Mat18d& HTVH, Vec18d& HTVr);
/**
* @brief 基于当前估计的NDT体素构建优化用的边(Edge)
* @param v 位姿顶点(优化变量)
* @param edges 输出:构建的NDT边列表(需外部管理内存)
* @details 用于图优化框架(如g2o/Ceres),将NDT约束转化为优化边
*/
void BuildNDTEdges(VertexPose* v, std::vector<EdgeNDT*>& edges);
private:
/**
* @brief 根据邻域类型生成需要考虑的邻域体素索引偏移
* @details 例如NearbyType::NEARBY6会生成6个方向的偏移(如(1,0,0), (-1,0,0)等),
* 结果存储在nearby_grids_中,供配准时快速查询邻域体素
*/
void GenerateNearbyGrids();
/**
* @brief 更新体素内部的均值和协方差
* @param v 待更新的体素数据
* @details 核心逻辑:
* 1. 检查体素内点数是否满足最小阈值(min_pts_in_voxel_)
* 2. 计算点集的均值(mu_)
* 3. 计算点集的协方差矩阵(sigma_)
* 4. 计算协方差的逆(info_),并处理奇异值(防止矩阵不可逆)
* 5. 标记ndt_estimated_为true,避免重复计算
*/
void UpdateVoxel(VoxelData& v);
CloudPtr source_ = nullptr; ///< 待配准的源点云(局部坐标系)
Options options_; ///< NDT配准参数配置
using KeyAndData = std::pair<KeyType, VoxelData>; ///< 体素索引-数据对(方便list存储)
std::list<KeyAndData> data_; ///< 体素数据链表(按添加顺序存储,方便删除旧体素)
/// 体素索引映射表(哈希表):体素索引 -> 链表迭代器(快速查找体素)
std::unordered_map<KeyType, std::list<KeyAndData>::iterator, hash_vec<3>> grids_;
std::vector<KeyType> nearby_grids_; ///< 邻域体素的索引偏移列表(如(0,0,0), (1,0,0)等)
bool flag_first_scan_ = true; ///< 首帧点云标记:首帧点云直接作为初始体素地图,不执行配准
};在 IncNdt3d 类中,把实际的体素数据放在双向链表中,然后在哈希表中维护它们的迭代器作为查找索引。当用户在里程计中添加新的点云时,再去维护体素数据、更新它们内部的高斯分布并且维护缓存队列。其中,体素内部的高斯分布的更新是可以并发的,通过并发函数来调用它。
cpp
void IncNdt3d::AddCloud(CloudPtr cloud_world) {
// 记录本次更新中被修改的体素(用set去重,less_vec<3>是3维向量的比较器)
std::set<KeyType, less_vec<3>> active_voxels;
// 遍历点云的每个点,分配到对应体素
for (const auto& p : cloud_world->points) {
// 将点云的点转换为Eigen向量(适配内部数据结构)
auto pt = ToVec3d(p);
// 计算点对应的体素索引:点坐标 * 体素大小倒数 → 取整得到整数索引
auto key = CastToInt(Vec3d(pt * options_.inv_voxel_size_));
// 查找该体素是否已存在
auto iter = grids_.find(key);
if (iter == grids_.end()) {
// 场景1:体素不存在 → 创建新体素
// 1. 向链表头部添加新体素(新体素标记为最新),初始点为当前点
data_.push_front({key, {pt}});
// 2. 向哈希表中添加索引:体素key → 链表迭代器(快速查找)
grids_.insert({key, data_.begin()});
// 3. 检查体素总数是否超过容量 → 超过则删除最旧的体素(LRU策略)
if (data_.size() >= options_.capacity_) {
// 从哈希表中删除最旧体素的索引
grids_.erase(data_.back().first);
// 从链表尾部删除最旧的体素(链表尾部是最久未使用的)
data_.pop_back();
}
} else {
// 场景2:体素已存在 → 向体素添加点,并更新LRU顺序
// 1. 向已有体素中添加当前点
iter->second->second.AddPoint(pt);
// 2. 将该体素移到链表头部(标记为最新使用,避免被优先删除)
data_.splice(data_.begin(), data_, iter->second);
// 3. 更新哈希表中的迭代器(指向链表新位置)
iter->second = data_.begin();
}
// 记录当前体素为活跃体素(后续需要更新其均值/协方差)
active_voxels.emplace(key);
}
// 并行更新所有活跃体素的均值、协方差和信息矩阵(par_unseq:并行+无序执行,提升效率)
std::for_each(std::execution::par_unseq, active_voxels.begin(), active_voxels.end(),
[this](const auto& key) {
// 从哈希表找到体素迭代器,更新体素数据
UpdateVoxel(grids_[key]->second);
});
// 首帧点云处理完成 → 后续点云需要执行配准,而非直接添加
flag_first_scan_ = false;
}
/**
* @brief 更新单个体素的均值、协方差和信息矩阵(核心:区分首帧/非首帧,增量更新)
* @param v 待更新的体素数据(引用传递,直接修改)
* @details 核心逻辑:
* 1. 首帧处理:简化计算,保证初始体素地图可用;
* 2. 非首帧:
* - 已估计且点数超最大 → 跳过(避免体素点数过多导致计算量激增);
* - 未估计且点数达标 → 首次计算均值/协方差;
* - 已估计且新点达标 → 增量更新均值/协方差,SVD处理防止矩阵奇异。
* 关键技巧:
* - 正则项(1e-3):避免协方差矩阵不可逆;
* - SVD分解:修正奇异值,保证信息矩阵(协方差逆)有效;
* - 清空pts_:节省内存(均值/协方差已计算,无需保留原始点)。
*/
void IncNdt3d::UpdateVoxel(VoxelData& v) {
// ========== 场景1:首帧点云的体素更新(简化逻辑) ==========
if (flag_first_scan_) {
if (v.pts_.size() > 1) {
// 体素内点数>1 → 计算均值和协方差(transform为恒等函数,直接用原始点)
math::ComputeMeanAndCov(v.pts_, v.mu_, v.sigma_, [this](const Vec3d& p) { return p; });
// 计算信息矩阵(协方差逆):加1e-3*单位矩阵(正则项),避免协方差奇异导致逆不存在
v.info_ = (v.sigma_ + Mat3d::Identity() * 1e-3).inverse();
} else {
// 体素内仅1个点 → 均值为该点,信息矩阵设为1e2*单位矩阵(简化处理)
v.mu_ = v.pts_[0];
v.info_ = Mat3d::Identity() * 1e2;
}
// 标记该体素已完成NDT估计(避免重复计算)
v.ndt_estimated_ = true;
// 清空原始点集(节省内存,均值/协方差已存储)
v.pts_.clear();
return;
}
// ========== 场景2:非首帧点云的体素更新 ==========
// 跳过条件:体素已估计且总点数超过最大值 → 不再更新(平衡精度与效率)
if (v.ndt_estimated_ && v.num_pts_ > options_.max_pts_in_voxel_) {
return;
}
// 子场景1:体素未估计NDT,且当前点集数量达标 → 首次计算均值/协方差
if (!v.ndt_estimated_ && v.pts_.size() > options_.min_pts_in_voxel_) {
// 计算点集的均值和协方差
math::ComputeMeanAndCov(v.pts_, v.mu_, v.sigma_, [this](const Vec3d& p) { return p; });
// 计算信息矩阵(加正则项避免奇异)
v.info_ = (v.sigma_ + Mat3d::Identity() * 1e-3).inverse();
// 标记为已估计
v.ndt_estimated_ = true;
// 清空原始点集
v.pts_.clear();
}
// 子场景2:体素已估计NDT,且新增点集数量达标 → 增量更新分布
else if (v.ndt_estimated_ && v.pts_.size() > options_.min_pts_in_voxel_) {
// 临时变量:存储新增点集的均值/协方差、合并后的均值/协方差
Vec3d cur_mu, new_mu;
Mat3d cur_var, new_var;
// 1. 计算本次新增点集的均值和协方差
math::ComputeMeanAndCov(v.pts_, cur_mu, cur_var, [this](const Vec3d& p) { return p; });
// 2. 增量合并:将旧体素的分布与新增点集的分布合并(更新均值和协方差)
math::UpdateMeanAndCov(v.num_pts_, v.pts_.size(), v.mu_, v.sigma_, cur_mu, cur_var, new_mu, new_var);
// 3. 更新体素的均值和协方差
v.mu_ = new_mu;
v.sigma_ = new_var;
// 4. 更新体素总点数(旧点数 + 新增点数)
v.num_pts_ += v.pts_.size();
// 5. 清空新增点集(节省内存)
v.pts_.clear();
// 6. 修正协方差矩阵的奇异值,保证信息矩阵有效
// SVD分解:将协方差矩阵分解为 U * Σ * V^T(Σ为奇异值对角矩阵)
Eigen::JacobiSVD svd(v.sigma_, Eigen::ComputeFullU | Eigen::ComputeFullV);
Vec3d lambda = svd.singularValues(); // 获取奇异值(Σ的对角线元素)
// 修正小奇异值:避免奇异值过小导致逆矩阵爆炸(nan/inf)
if (lambda[1] < lambda[0] * 1e-3) {
lambda[1] = lambda[0] * 1e-3;
}
if (lambda[2] < lambda[0] * 1e-3) {
lambda[2] = lambda[0] * 1e-3;
}
// 7. 重新计算信息矩阵(协方差逆):利用SVD分解结果重构逆矩阵
Mat3d inv_lambda = Vec3d(1.0 / lambda[0], 1.0 / lambda[1], 1.0 / lambda[2]).asDiagonal();
v.info_ = svd.matrixV() * inv_lambda * svd.matrixU().transpose();
}
}每个体素会带有一个标记,标志它内部的高斯参数是否已经被估计。为每个体素设计一个缓冲区,当缓冲区中的点数大于一定数量时,才估计它的高斯参数。同时,新加人的点也会放入这个缓冲区,达到一定数量后会重新估计。此外,如果一个栅格里的累积点数已经有很多,就不再对其进行更新,这也可以节省一定的计算量。
高斯更新的实现代码:
由此可得在实现局部地图构建时,只需去一些关键帧,不断地往NDT内部添加新关键帧,然后效用函数即可,不用去拼接关键帧点云。
cpp
// 前置声明(保证代码完整性)
namespace sad { // 对应原代码的namespace
using PointCloudType = pcl::PointCloud<pcl::PointXYZIRT>; // 示例:激光点云类型(可根据实际调整)
using CloudPtr = PointCloudType::Ptr; // 点云智能指针类型
struct PCLMapViewer; // 点云可视化器前置声明
namespace math {
const double kDEG2RAD = M_PI / 180.0; // 角度转弧度常量
} // namespace math
/**
* @class IncrementalNDTLO
* @brief 基于直接NDT方法的递推式激光里程计(Lidar Odometry, LO)
* @details 核心特性:
* 1. 以"关键帧"为单位构建局部地图(Local Map),而非使用全部历史帧,平衡精度与效率;
* 2. 利用增量式NDT(IncNdt3d)完成当前帧到局部地图的配准,估计位姿;
* 3. 支持实时可视化点云和轨迹,支持地图保存;
* 4. 自动判定关键帧(基于平移/旋转阈值、帧数阈值),更新局部地图。
*/
class IncrementalNDTLO {
public:
/**
* @struct Options
* @brief 激光里程计的配置参数结构体
*/
struct Options {
/// @brief 默认构造函数(初始化默认参数)
Options() {}
double kf_distance_ = 0.5; ///< 关键帧判定的平移阈值(米):当前帧与上一关键帧平移超过此值则设为关键帧
double kf_angle_deg_ = 30; ///< 关键帧判定的旋转角度阈值(度):当前帧与上一关键帧旋转超过此值则设为关键帧
bool display_realtime_cloud_ = true; ///< 是否启用实时点云可视化(依赖PCLMapViewer)
IncNdt3d::Options ndt3d_options_; ///< 增量NDT的配置参数(体素大小、迭代次数等)
};
/**
* @brief 构造函数(带默认配置)
* @param options 激光里程计配置参数(默认使用结构体默认值)
* @details 初始化逻辑:
* 1. 保存配置参数;
* 2. 如果启用实时可视化,创建PCL点云可视化器;
* 3. 初始化增量NDT对象(传入NDT配置)。
*/
IncrementalNDTLO(Options options = Options()) : options_(options) {
if (options_.display_realtime_cloud_) {
// 创建PCL地图可视化器,参数0.5为可视化窗口的点云显示分辨率(示例)
viewer_ = std::make_shared<PCLMapViewer>(0.5);
}
// 初始化增量NDT对象(核心配准器)
ndt_ = IncNdt3d(options_.ndt3d_options_);
}
/**
* @brief 向激光里程计中添加一帧激光点云,估计该帧的位姿
* @param scan 当前帧激光点云(局部坐标系,即激光雷达坐标系)
* @param pose 输出:该帧的估计位姿(世界坐标系,输入时可传猜测值)
* @param use_guess 是否使用外部传入的位姿猜测值(默认false)
* @details 核心逻辑:
* 1. 首帧处理:位姿设为单位矩阵,直接加入局部地图;
* 2. 非首帧:
* - 设置NDT的源点云(当前帧);
* - 生成位姿猜测值(历史两帧递推 / 外部传入);
* - 调用NDT配准估计位姿;
* - 将当前帧点云变换到世界坐标系;
* - 判定是否为关键帧,若是则加入局部地图并更新关键帧位姿;
* - 实时可视化(若启用);
* - 累计帧数。
*/
void AddCloud(CloudPtr scan, SE3& pose, bool use_guess = false);
/**
* @brief 保存当前的点云地图(依赖可视化器)
* @param map_path 地图保存路径(如"./map.pcd")
*/
void SaveMap(const std::string& map_path);
private:
/**
* @brief 判定当前帧是否为关键帧
* @param current_pose 当前帧的估计位姿(世界坐标系)
* @return true=是关键帧,false=非关键帧
* @details 关键帧判定条件(满足任一即成立):
* 1. 距离上一关键帧的帧数超过10帧(强制关键帧,避免长时间不更新局部地图);
* 2. 与上一关键帧的平移距离超过kf_distance_;
* 3. 与上一关键帧的旋转角度超过kf_angle_deg_(转弧度后)。
*/
bool IsKeyframe(const SE3& current_pose);
private:
Options options_; ///< 激光里程计配置参数
bool first_frame_ = true; ///< 首帧标记:首帧位姿设为原点,直接加入局部地图
std::vector<SE3> estimated_poses_; ///< 存储所有帧的估计位姿(用于轨迹记录、位姿猜测)
SE3 last_kf_pose_; ///< 上一关键帧的位姿(用于关键帧判定)
int cnt_frame_ = 0; ///< 距离上一关键帧的累计帧数
IncNdt3d ndt_; ///< 增量NDT配准器(核心:维护局部地图,执行配准)
std::shared_ptr<PCLMapViewer> viewer_ = nullptr; ///< 点云可视化器(实时显示点云/轨迹)
};
/**
* @brief 核心函数:添加一帧点云并估计位姿
* @param scan 当前帧点云(激光雷达坐标系)
* @param pose 输出位姿(世界坐标系);若use_guess=true,输入为猜测位姿
* @param use_guess 是否使用外部猜测位姿(默认false:用历史位姿递推)
*/
void IncrementalNDTLO::AddCloud(CloudPtr scan, SE3& pose, bool use_guess) {
// ========== 场景1:首帧处理(初始化) ==========
if (first_frame_) {
pose = SE3(); // 首帧位姿设为单位矩阵(世界坐标系原点)
last_kf_pose_ = pose; // 首帧作为第一个关键帧
ndt_.AddCloud(scan); // 首帧点云直接加入NDT的局部地图
first_frame_ = false; // 标记首帧处理完成
return;
}
// ========== 场景2:非首帧处理(位姿估计) ==========
SE3 guess; // 位姿猜测值(用于NDT配准的初始值,提升收敛速度)
ndt_.SetSource(scan); // 将当前帧设为NDT的源点云(待配准点云)
// 生成位姿猜测值:
if (estimated_poses_.size() < 2) {
// 历史帧不足2帧 → 无递推依据,猜测值设为单位矩阵
ndt_.AlignNdt(guess);
} else {
if (!use_guess) {
// 不使用外部猜测 → 从最近两帧位姿递推(匀速运动假设)
SE3 T1 = estimated_poses_[estimated_poses_.size() - 1]; // 上一帧位姿
SE3 T2 = estimated_poses_[estimated_poses_.size() - 2]; // 上上帧位姿
// 递推公式:guess = T1 * (T2⁻¹ * T1) → 假设运动趋势与上两帧一致
guess = T1 * (T2.inverse() * T1);
} else {
// 使用外部传入的猜测位姿(如IMU预积分结果)
guess = pose;
}
// 调用增量NDT配准:以guess为初始值,估计当前帧位姿
ndt_.AlignNdt(guess);
}
// 更新当前帧的估计位姿
pose = guess;
// 记录当前帧位姿(用于后续递推、轨迹可视化)
estimated_poses_.emplace_back(pose);
// 将当前帧点云从激光坐标系变换到世界坐标系(用于关键帧添加/可视化)
CloudPtr scan_world(new PointCloudType);
pcl::transformPointCloud(*scan, *scan_world, guess.matrix().cast<float>());
// 判定当前帧是否为关键帧 → 若是则更新局部地图
if (IsKeyframe(pose)) {
last_kf_pose_ = pose; // 更新上一关键帧位姿
cnt_frame_ = 0; // 重置关键帧帧数计数器
ndt_.AddCloud(scan_world); // 将关键帧点云加入NDT的局部地图
}
// 实时可视化(若启用):显示当前帧位姿和世界坐标系下的点云
if (viewer_ != nullptr) {
viewer_->SetPoseAndCloud(pose, scan_world);
}
// 累计距离上一关键帧的帧数
cnt_frame_++;
}
/**
* @brief 关键帧判定函数:满足以下任一条件则为关键帧
* 1. 距离上一关键帧超过10帧;
* 2. 平移距离超过阈值;
* 3. 旋转角度超过阈值(转弧度后)。
*/
bool IncrementalNDTLO::IsKeyframe(const SE3& current_pose) {
// 条件1:强制关键帧(避免局部地图长时间不更新)
if (cnt_frame_ > 10) {
return true;
}
// 计算当前帧与上一关键帧的相对位姿
SE3 delta = last_kf_pose_.inverse() * current_pose;
// 条件2:平移距离阈值 | 条件3:旋转角度阈值(角度转弧度)
return delta.translation().norm() > options_.kf_distance_ ||
delta.so3().log().norm() > options_.kf_angle_deg_ * math::kDEG2RAD;
}
/**
* @brief 保存地图:委托可视化器完成(仅当可视化器存在时有效)
* @param map_path 地图保存路径(PCD格式)
*/
void IncrementalNDTLO::SaveMap(const std::string& map_path) {
if (viewer_) {
viewer_->SaveMap(map_path);
}
}
} // namespace sad构建结果:
ps俺不中嘞,实习半周啥都没学,难受