AUTOSAR 学习效率翻倍:我如何把 CP/AP 规范重构成认知地图
先报个数吧。2025 年我在「嵌入式与硬件开发」写了 502 篇文章,访问量 594,368 ,点赞 12,388 ,收藏 10,903 ,代码片分享了 140 次,粉丝 6,491。
说实话,这些数字里我最在意的是"收藏"数。为啥?因为收藏代表读者觉得这篇文章以后还用得上,是个长期投票。
今年我花时间最多的,其实就一件事:把 AUTOSAR CP/AP 那些又长又密的规范,用 UML 重新画成一套"认知地图"。想法很简单:让读者先把整体模型搭起来,再回头啃细节;从"文档根本看不下去"变成"看图能定位、按图能学习、拿着图能跟人聊"。
一、为什么 AUTOSAR 难学:不是你不努力,是文档写法不太友好
AUTOSAR 在 乘用车与商用车 ECU/域控(含动力、底盘、车身、网关、座舱、智驾) 以及向 软件定义汽车(SDV)的 SOA/高性能计算平台(Adaptive)演进的领域最重要,因为它提供了跨供应链可复用、可集成、可认证的软件标准底座。其重要性不言而喻.
AUTOSAR包含以下两个方面的规范:
-
AUTOSAR Classic Platform(CP): 官网的高层描述其实挺清楚:应用层、RTE、BSW 三层,RTE 在中间做中介,帮应用和基础软件解耦。
-
Adaptive Platform(AP): 引入了更多"面向复杂软件"的概念和工件,特别强调方法论和工作产品的组织方式。
但问题来了------文档规模实在太大了。
根据官方 R24-11 版本统计:
- CP 规范:约 200+ 文档,超过 20,000 页,2,600+ 条需求
- AP 规范:持续增长中,每个功能集群都包含多个需求规范、软件规范和解释文档
- 物理规模 :如果打印成 A4 纸堆叠,高度约 2 米
光是这些数字可能还不够直观。我算了一笔账:
| 阅读类型 | 速度 | CP 全部阅读时间 | AP 全部阅读时间 | 合计 |
|---|---|---|---|---|
| 精读 (5-10页/小时) | 7页/小时 | 2,857小时 ≈ 357工作日 ≈ 1.4年 | 估算600-800小时 ≈ 75-100工作日 | 1.5-1.8年 |
| 略读 (15-20页/小时) | 18页/小时 | 1,111小时 ≈ 139工作日 ≈ 0.6年 | 估算300-400小时 ≈ 38-50工作日 | 0.7-0.9年 |
注意 :这还只是"读完"的时间,不包括理解、实践、查阅资料、反复琢磨的时间。实际学习周期通常是阅读时间的 2-3 倍。
更别说,官方文档自己都承认要处理"thousands of pages of existing specifications "(数千页现有规范),行业文章也一致认为 AUTOSAR 有 "steep learning curve"(陡峭的学习曲线)。
所以,问题不在于你不够努力,而是------文档规模已经超出了人类正常学习时间预算。
但实际学起来,主要卡在四个地方:
- 文档规模太大,时间不可行:光 CP 就 20,000+ 页,精读需要 1.4 年,略读也要半年多。这还不算理解和实践的时间。
- 概念一堆,但关系看不清:单个术语都能懂,放一起就懵了,脑子里形不成体系。
- 静态和动态混在一起:刚看懂接口和配置(静态),马上又跳到时序和链路(动态),脑内模型反复重建,很累。
- 不知道从哪下手:CP 是"配置---生成---运行",AP 是"工件---部署---生命周期",初学者很难形成可复制的工作流。
说白了,核心问题是:文档规模已经超出了人类正常学习时间预算,而且规范的呈现方式也不太适合快速建模。尽管博主已经在这个领域深研多年,但还是觉得有些认知不够深入的地方, 直到我开始用UML的方式构建AUTOSAR的认知地图.
二、2025年聚焦方向:把规范重构为UML认知地图
我的核心思路其实很简单:把 AUTOSAR 规范中的长文描述画成"关系网络",用 UML 绘制一套可导航的认知地图。
不过要说明一下:我的目标不是替代官方规范,而是提供一套可快速导航的辅助工具。具体细节还是得以官方规范为准。
2.1 我的创作流程:5步转换
我总结了一套处理流程,分5个步骤来操作:
2.1.1 输入阶段
开始画图前,我先准备这些材料:
- 规范章节:AUTOSAR官方文档的具体章节内容
- 元模型定义:规范中定义的元模型(Meta-model)和关键术语
- 典型场景:实际工程中的应用场景(如通信链路、诊断链路、启动部署)
2.1.2 抽取阶段
然后从这些材料里抽取关键信息,我按4个类别来组织:
-
实体(Entities):
- 模块(Module):如COM、PduR、CanIf等
- 工件(Work Product):AP中的Executable、Machine等
- 接口(Interface):Sender-Receiver、Client-Server等
-
关系(Relationships):
- 依赖(Dependency):模块间的调用关系
- 包含(Inclusion):组合或聚合关系
- 映射(Mapping):配置项到实现元素的映射
-
边界(Boundaries):
- 平台边界:CP vs AP
- 时期边界:设计期(Design-time) vs 运行期(Runtime)
-
动态(Dynamics):
- 时序(Sequence):函数调用顺序、数据流转时序
- 状态(State):模块生命周期、通信模式状态机
2.1.3 输出阶段
有了这些信息,就可以生成UML视图了。我注意了3点:
- 视图分解:避免单张"大全图",采用一组互相引用的"小地图"
- 视图关联:确保视图之间的一致性和可追溯性
- 分层展示:从高层架构到细节实现的分层视图
2.1.4 校验阶段
画完之后还要校验,确保准确性:
- 规范回对:使用规范原文的关键句进行回对
- 术语检查:确保不偏离官方规范的术语定义
- 关系验证:验证模块间关系是否符合规范描述
2.1.5 迭代优化
最后根据反馈持续优化:
- 问题收集:收集读者在实际使用中遇到的问题
- 缺口识别:识别当前视图集的不足之处
- 补充完善:针对高频问题补充新的视图或修改现有视图
2.2 工具箱:4类UML视图
根据 AUTOSAR 的特点,我主要用这四类 UML 视图。为什么选它们?实践中我发现,它们刚好对应AUTOSAR的4个认知难点:
| 视图类型 | 解决什么问题 | 优点 |
|---|---|---|
| 类图 | 概念之间到底是啥关系(依赖/引用/包含) | 不用死背术语,"看关系"就能理解 |
| 组件图 | CP/AP 各层模块怎么分工、边界在哪 | 快速建立层次感,避免"越学越乱" |
| 序列图 | 一条数据/诊断请求怎么流转 | 把一堆名词变成"可追踪的路径" |
| 状态图 | 生命周期/可用性/模式怎么影响行为 | 搞懂"为啥有时候触发不了、跑不起来" |
说到底,就是用多视图分别解决"结构、分工、链路、状态"这四类认知障碍。
三、实践:4种UML视图详解
接下来我详细介绍这4种UML视图,每种都有图示例和对应的C代码。
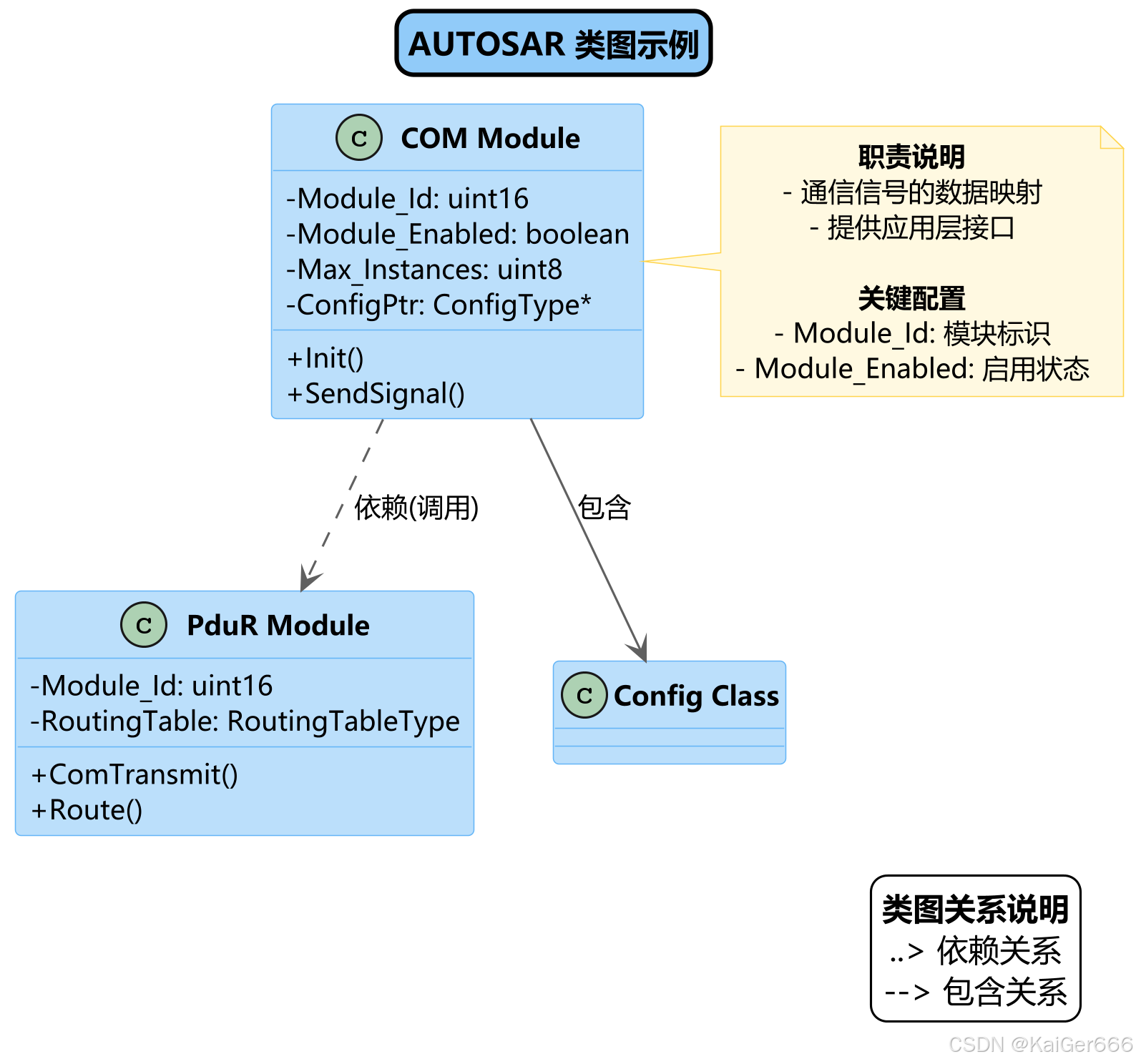
3.1 类图:搞清"关系"
我用它主要解决"关系"问题:搞清楚模块之间到底是依赖、引用还是包含。
实践中我发现它能:
- 展示 AUTOSAR 模块之间的静态关系
- 说明配置类(Config Class)的属性和约束
- 描述软件组件(SW-C)的接口定义
类图示例 :
AUTOSAR C 代码示例:
c
/* AUTOSAR 模块配置结构示例 */
typedef struct {
uint16 Module_Id; /* 模块标识符 */
boolean Module_Enabled; /* 模块启用状态 */
uint8 Max_Instances; /* 最大实例数 */
const Module_ConfigType* ConfigPtr; /* 配置指针 */
} Module_ConfigType;
/* 模块初始化接口 */
Std_ReturnType Module_Init(const Module_ConfigType* ConfigPtr);3.2 组件图:建立"层次感"
用途:展示 CP/AP 各层模块的分工和边界
应用场景:
- 建立 AUTOSAR 分层架构的整体视图
- 明确应用层、RTE、BSW 的职责边界
- 说明跨层数据流向
组件图示例 :

AUTOSAR C 代码示例:
c
/* RTE 接口示例 */
#define RTE_E_OK 0x00 /* 操作成功 */
#define RTE_E_NOT_OK 0x01 /* 操作失败 */
/* Runnable 实体接口 */
void Runnable_Entity_Init(void);
void Runnable_Entity_Run(void);
/* 数据接口 */
Std_ReturnType RTE_Write_<PortName>(<DataDataType> data);
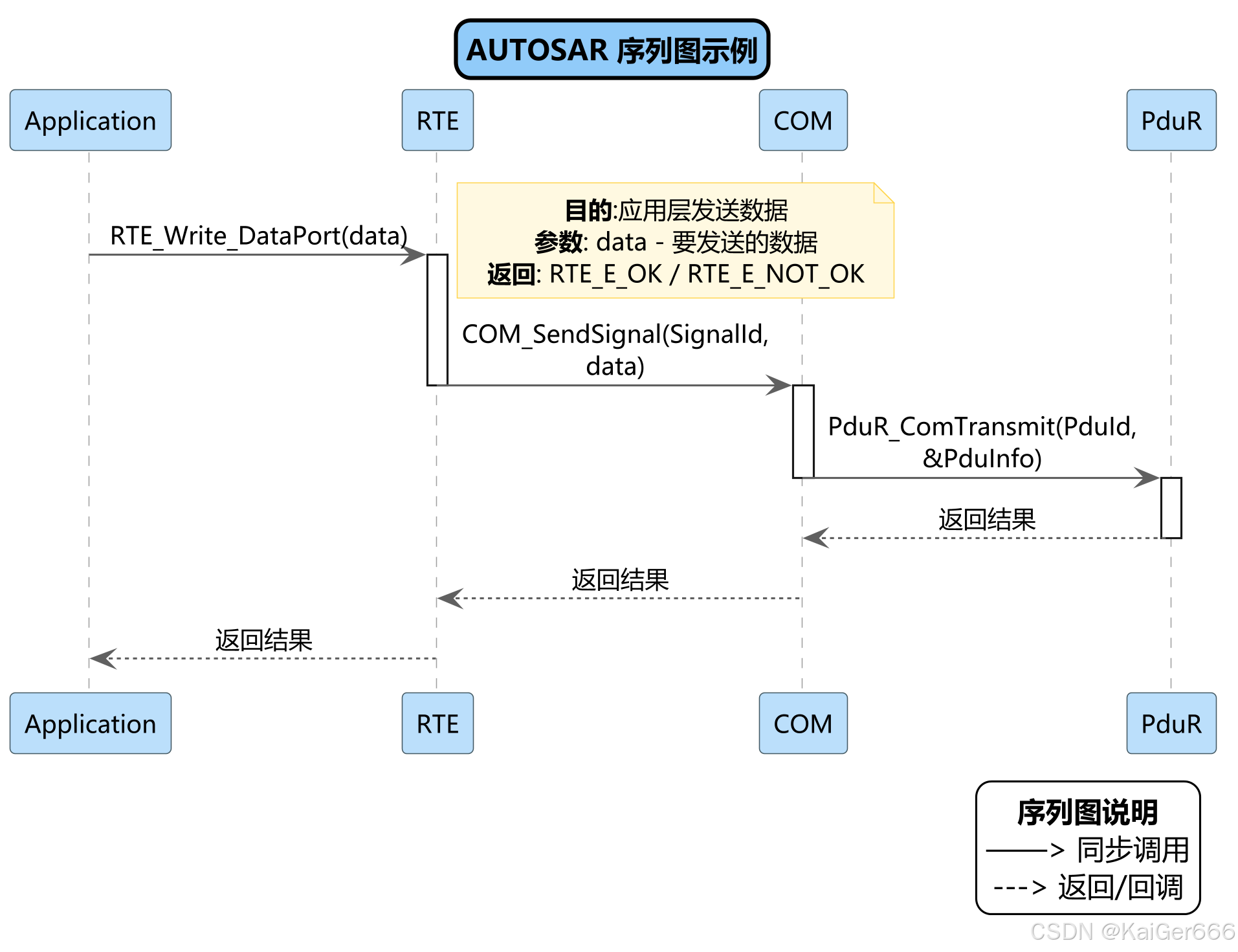
Std_ReturnType RTE_Read_<PortName>(<DataDataType>* data);3.3 序列图:追踪"路径"
我用它追踪数据怎么跑:从应用层到总线,中间经过了哪些模块,谁调用了谁。
实践中我发现它能:
- 描述从应用层到总线的完整通信路径
- 说明诊断服务的请求-响应流程
- 解释 RTE 到 BSW 的调用时序
序列图示例 :
AUTOSAR C 代码示例:
c
/* AUTOSAR 通信序列示例 */
Std_ReturnType Application_SendData(void)
{
Std_ReturnType result;
/* 应用层调用 RTE 接口 */
result = RTE_Write_DataPort(data);
if (result != RTE_E_OK) {
return RTE_E_NOT_OK;
}
/* RTE 内部处理 */
/* RTE 调用 COM 模块 */
result = COM_SendSignal(SignalId, data);
if (result != E_OK) {
DET_ReportError(MODULE_ID, 0, API_ID, ERROR_CODE);
return E_NOT_OK;
}
/* COM 调用 PDU 路由器 */
result = PduR_ComTransmit(PduId, &PduInfo);
return result;
}3.4 状态图:理解"状态"
我用它看状态变化:什么时候从初始化到运行,什么时候关机,什么条件下会触发状态切换。
实践中我发现它能:
- 描述 ECU 状态机的状态转换
- 说明通信模式(CAN/NM)的状态变化
- 解释模式切换的触发条件和影响
状态图示例 :

AUTOSAR C 代码示例:
c
/* AUTOSAR 状态机示例 */
typedef enum {
ECU_STATE_INIT = 0,
ECU_STATE_RUNNING,
ECU_STATE_SHUTDOWN,
ECU_STATE_SLEEP
} Ecu_StateType;
/* 状态机处理函数 */
void Ecu_MainFunction(void)
{
Ecu_StateType currentState = Ecu_GetState();
switch (currentState) {
case ECU_STATE_INIT:
if (Ecu_IsInitializationComplete()) {
Ecu_SetState(ECU_STATE_RUNNING);
}
break;
case ECU_STATE_RUNNING:
if (Ecu_IsShutdownRequested()) {
Ecu_SetState(ECU_STATE_SHUTDOWN);
}
break;
case ECU_STATE_SHUTDOWN:
if (Ecu_IsShutdownComplete()) {
Ecu_SetState(ECU_STATE_SLEEP);
}
break;
default:
break;
}
}四、从"规范长文"到"认知地图"的收益
通过将文字描述转换为可视化图表,可以实现:
1. 快速定位:从"逐页查找"变为"按图索骥"
- 以前: 知道有某个概念,但不确定在哪个文档的哪个章节
- 现在: 看图定位到相关模块,再去文档查阅具体细节
2. 结构化理解:从"碎片化记忆"变为"系统化建模"
- 以前: 记住一堆术语,但不知道它们之间的关系
- 现在: 看图就能理解模块间的依赖、包含、映射关系
3. 高效沟通:团队成员基于同一套图表进行技术讨论
- 以前: 每个人对架构的理解不一样,讨论时需要大量对齐
- 现在: 对着同一张图讨论,快速达成共识
五、面向中国现实:为什么"认知地图"能推动人才培养与技术发展
我希望我的文章能对中国 AUTOSAR 产业的人才培养有点帮助,但我也提醒自己:价值不能靠喊口号,得靠机制。我看到的机制主要有三条:
- 降低入门门槛:新人能更快从"听说过 AUTOSAR"走到"能讲清楚系统结构与链路"。
- 提升协作效率:UML 是跨角色的语言,适合 OEM、Tier1、工具链、开发、测试在同一张图上对齐。
- 沉淀可复用资产:相比直接把规范丢给新人,一套地图更容易变成企业内训课件、评审模板和知识库目录。
国内项目节奏普遍紧、大家都是碎片时间学习,这种"先建模、再精读"的方式更可执行,也更适合大家。
六、我的收获:授人玫瑰,手有余香
今年最大的收获,是对技术的理解变了。
以前看AUTOSAR规范,看到的是COM、PduR、CanIf这些孤立模块。画成认知地图之后,我看到的是它们之间的调用关系、数据流转、配置映射。当我能用一张图讲清楚"从应用层到总线的数据流"时,我才真正理解了AUTOSAR的整体架构。
更让我欣慰的是,这些图真的帮到了读者。
有读者留言说:"文章不仅讲解技术,还分享了背后的设计思路,这对提升技术思维太有帮助了。"(宝码香车,2025.07.29)
这些反馈让我知道,这套方法是有效的。帮助读者的同时,他们的提问也让我重新审视那些习以为常的概念,推动着认知地图越来越完善。
这个过程也让我形成了一套可复用的方法论:如何把复杂文档拆解成可理解的模块,如何用可视化降低认知门槛,如何平衡深度与易懂。这套方法,明年可以用到其他技术领域。
更重要的是,我找到了技术写作的意义:不是为了展示自己懂多少,而是为了让更多人少走弯路。那10,903次收藏,就是最好的证明。
明年我会继续深耕这个方向,围绕通信、诊断、OS时序、以太网/TSN这些高频痛点持续输出"地图化讲解"。也欢迎在评论区告诉我:你最希望我下一张"认知地图"讲清楚哪个AUTOSAR概念? 我会从大家最关心的主题开始继续完善这套认知地图体系。