目录
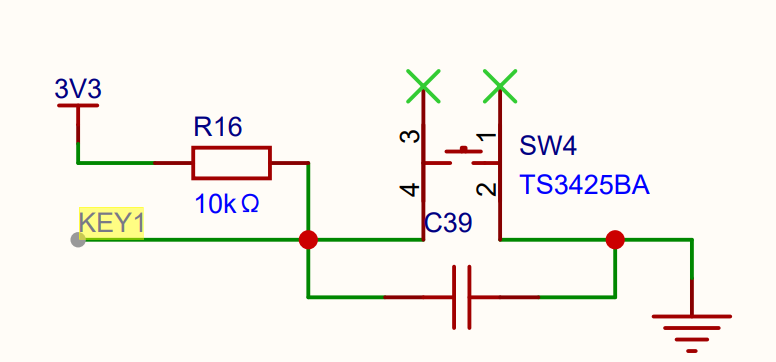
没按下时KEY1连接R16到3V3,所以没按下时是高电平,按下时导通到GND,按下是低电平
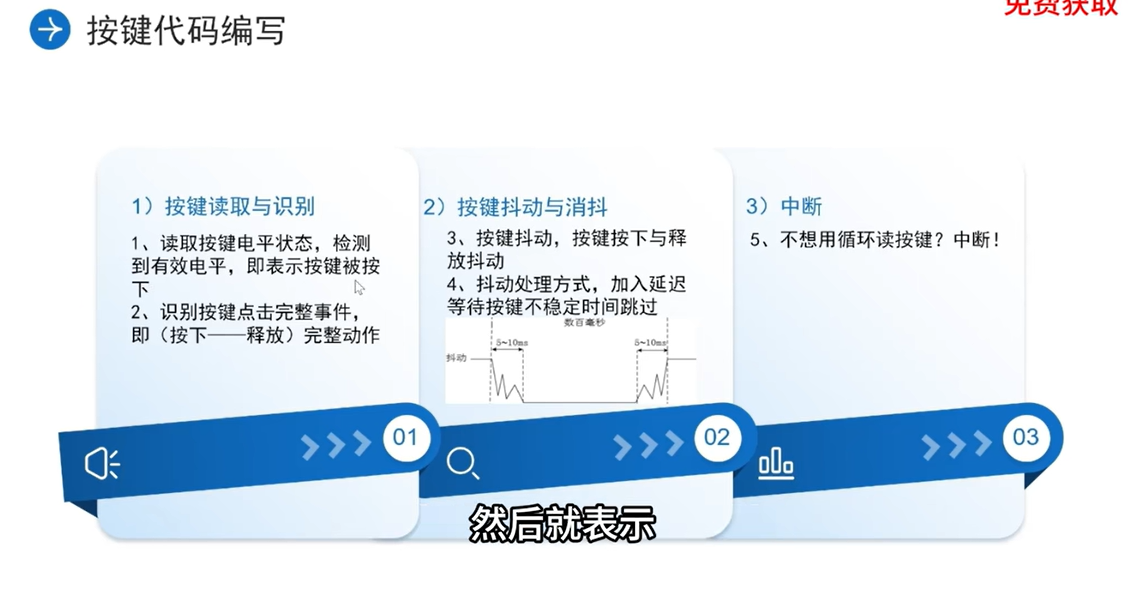
按键是输入,
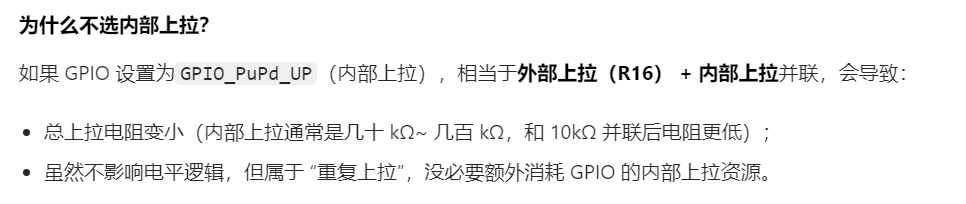
按键对应的GPIO这个不需要设置上拉和下拉

cpp
#include <stdint.h>
#include "stm32f4xx.h"
int main(void)
{
// KEY1 PA0 KEY2 PC4 KEY3 PC5
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN; //输入
GPIO_InitStruct.GPIO_PuPd=GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Speed=GPIO_Medium_Speed;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_4 | GPIO_Pin_5;
GPIO_Init(GPIOC,&GPIO_InitStruct);
while(1)
{
uint8_t key1=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0);
if(key1==Bit_RESET)
{
//按键被按下
for(int i=0;i<100;i++);
}
}
}按键LED
main.c
cpp
#include <stdint.h>
#include "stm32f4xx.h"
#include "led.h"
int main(void)
{
// KEY1 PA0 KEY2 PC4 KEY3 PC5
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC,ENABLE);
//开启LED灯时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE,ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN; //输入
GPIO_InitStruct.GPIO_PuPd=GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Speed=GPIO_Medium_Speed;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_4 | GPIO_Pin_5;
GPIO_Init(GPIOC,&GPIO_InitStruct);
led_init();
while(1)
{
led_all_off();
uint8_t key1=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0);
if(key1==Bit_RESET)
{
led_on(1);
}
uint8_t key2=GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_4);
if(key2==Bit_RESET)
{
led_on(2);
}
uint8_t key3=GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_5);
if(key3==Bit_RESET)
{
led_on(3);
}
}
}led.h
cpp
#ifndef __LED_H__
#define __LED_H__
#include <stdbool.h>
#include <stdint.h>
void led_init(void);
void led_set(uint8_t idx, bool onoff);
void led_on(uint8_t idx);
void led_off(uint8_t idx);
void led_all_off(void);
#endif /* __LED_H__ */led.c
cpp
#include <stdbool.h>
#include "stm32f4xx.h"
// LED1: PE9
// LED2: PB1
// LED3: PB0
#define LED1_PORT GPIOE
#define LED1_PIN GPIO_Pin_9
#define LED2_PORT GPIOB
#define LED2_PIN GPIO_Pin_1
#define LED3_PORT GPIOB
#define LED3_PIN GPIO_Pin_0
void led_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_High_Speed;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Pin = LED1_PIN;
GPIO_Init(LED1_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = LED2_PIN;
GPIO_Init(LED2_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = LED3_PIN;
GPIO_Init(LED3_PORT, &GPIO_InitStructure);
}
void led_set(uint8_t idx, bool onoff)
{
switch (idx)
{
case 1:
GPIO_WriteBit(LED1_PORT, LED1_PIN, onoff ? Bit_RESET : Bit_SET);
break;
case 2:
GPIO_WriteBit(LED2_PORT, LED2_PIN, onoff ? Bit_RESET : Bit_SET);
break;
case 3:
GPIO_WriteBit(LED3_PORT, LED3_PIN, onoff ? Bit_RESET : Bit_SET);
break;
default:
break;
}
}
void led_on(uint8_t idx)
{
led_set(idx, true);
}
void led_off(uint8_t idx)
{
led_set(idx, false);
}
void led_all_off(void)
{
led_set(1, false);
led_set(2, false);
led_set(3, false);
}按键串口
cpp
#include <stdint.h>
#include <string.h>
#include "stm32f4xx.h"
static void usart_init(void)
{
//初始化GPIO的引脚 TX GPIOA9 RX GPIOA10
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//初始化串口
USART_InitTypeDef USART_InitStructure;
USART_StructInit(&USART_InitStructure);
USART_InitStructure.USART_BaudRate=115200u;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode=USART_Mode_Rx | USART_Mode_Tx;
USART_InitStructure.USART_Parity=USART_Parity_No; //校验位
USART_InitStructure.USART_StopBits=USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
USART_Init(USART1,&USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
//单片机发送
static void usart_write(const char str[])
{
int len=strlen(str);
for(int i=0;i<len;i++)
{
// 等待发送寄存器为空,再写入字符
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1,(uint16_t) str[i]);
// 等待字符完全发送完成
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
}
int main(void)
{
// KEY1 PA0 KEY2 PC4 KEY3 PC5
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC,ENABLE);
//开启串口时钟 另外串口的PA9和PA10的GPIOA时钟上面已经开启过
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN; //输入
GPIO_InitStruct.GPIO_PuPd=GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Speed=GPIO_Medium_Speed;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_4 | GPIO_Pin_5;
GPIO_Init(GPIOC,&GPIO_InitStruct);
usart_init();
while(1)
{
uint8_t key1=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0);
if(key1==Bit_RESET)
{
usart_write("key1 pressed\r\n");
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)==Bit_RESET);
}
uint8_t key2=GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_4);
if(key2==Bit_RESET)
{
usart_write("key2 pressed\r\n");
while(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_4)==Bit_RESET);
}
uint8_t key3=GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_5);
if(key3==Bit_RESET)
{
usart_write("key3 pressed\r\n");
while(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_5)==Bit_RESET);
}
}
}按键封装
main.c
按键1我加了消抖,消抖就是延迟再判断一下
按键2和按键3没有消抖,由于板子按键原理图加了电容滤波,发现加不加消抖没什么区别
cpp
#include <stdint.h>
#include <string.h>
#include "stm32f4xx.h"
#include "key.h"
#include "usart.h"
#include "cpu_delay.h"
#define delay(ms) cpu_delay((ms)*100)
int main(void)
{
// KEY1 PA0 KEY2 PC4 KEY3 PC5
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC,ENABLE);
//开启串口时钟 另外串口的PA9和PA10的GPIOA时钟上面已经开启过
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN; //输入
GPIO_InitStruct.GPIO_PuPd=GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Speed=GPIO_Medium_Speed;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_4 | GPIO_Pin_5;
GPIO_Init(GPIOC,&GPIO_InitStruct);
key_init();
usart_init();
while(1)
{
if(key_read(1))
{
//加消抖的
delay(10);
if(key_read(1))
{
usart_write("key1 pressed\r\n");
while(key_read(1));
delay(10);
}
}
//不加消抖的
if(key_read(2))
{
usart_write("key2 pressed\r\n");
while(key_read(2));
}
//不加消抖的
if(key_read(3))
{
usart_write("key3 pressed\r\n");
while(key_read(3));
}
}
}key.h
cpp
#ifndef __KEY_H__
#define __KEY_H__
#include <stdbool.h>
#include <stdint.h>
void key_init(void);
bool key_read(uint8_t idx);
#endif /* __KEY_H__ */key.c
cpp
#include <stdbool.h>
#include "stm32f4xx.h"
// KEY1: PA0
// KEY2: PC4
// KEY3: PC5
#define KEY1_PORT GPIOA
#define KEY1_PIN GPIO_Pin_0
#define KEY2_PORT GPIOC
#define KEY2_PIN GPIO_Pin_4
#define KEY3_PORT GPIOC
#define KEY3_PIN GPIO_Pin_5
void key_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN; //输入
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed=GPIO_Medium_Speed;
GPIO_InitStructure.GPIO_Pin = KEY1_PIN;
GPIO_Init(KEY1_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = KEY2_PIN;
GPIO_Init(KEY2_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = KEY3_PIN;
GPIO_Init(KEY3_PORT, &GPIO_InitStructure);
}
bool key_read(uint8_t idx)
{
switch (idx)
{
case 1:
return GPIO_ReadInputDataBit(KEY1_PORT, KEY1_PIN)==Bit_RESET;
case 2:
return GPIO_ReadInputDataBit(KEY2_PORT, KEY2_PIN)==Bit_RESET;
case 3:
return GPIO_ReadInputDataBit(KEY3_PORT, KEY3_PIN)==Bit_RESET;
default:
return false;
}
}usart.h
cpp
#ifndef __USART_H__
#define __USART_H__
void usart_init(void);
void usart_write(const char str[]);
#endif /* __USART_H__ */usart.c
cpp
#include <stdint.h>
#include <string.h>
#include "stm32f4xx.h"
void usart_init(void)
{
//初始化GPIO的引脚 TX GPIOA9 RX GPIOA10
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//初始化串口
USART_InitTypeDef USART_InitStructure;
USART_StructInit(&USART_InitStructure);
USART_InitStructure.USART_BaudRate=115200u;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode=USART_Mode_Rx | USART_Mode_Tx;
USART_InitStructure.USART_Parity=USART_Parity_No; //校验位
USART_InitStructure.USART_StopBits=USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
USART_Init(USART1,&USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
//单片机发送
void usart_write(const char str[])
{
int len=strlen(str);
for(int i=0;i<len;i++)
{
// 等待发送寄存器为空,再写入字符
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1,(uint16_t) str[i]);
// 等待字符完全发送完成
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
}cpu_delay.h
cpp
#ifndef __CPU_DELAY_H__
#define __CPU_DELAY_H__
#include <stdint.h>
void cpu_delay(uint32_t us);
#endif /* __CPU_DELAY_H__ */cpu_delay.c
cpp
#include "stm32f4xx.h"
void cpu_delay(uint32_t us)
{
//上面处理ms
while(us>1000)
{
//每次循环等待1ms
SysTick->LOAD=SystemCoreClock/1000;
SysTick->VAL=0; //当前计数器清0
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk | SysTick_CTRL_ENABLE_Msk;
while ((SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk) == 0);//等待延迟结束
SysTick->CTRL = ~SysTick_CTRL_ENABLE_Msk;//关闭
us-=1000;
}
//下面处理us
if(us>0)
{
SysTick->LOAD=(SystemCoreClock/1000/1000)*us-1;//自动转载值 系统主频
SysTick->VAL=0; //当前计数器清0
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk | SysTick_CTRL_ENABLE_Msk;
while ((SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk) == 0);//等待延迟结束
SysTick->CTRL = ~SysTick_CTRL_ENABLE_Msk;//关闭
}
}