一、何谓"工程第一性原则"
在工程语境中,"第一性原则"并非形而上学意义上的终极公理,也不同于具体技术路线或实现方法。它指的是这样一类原则:
任何工程系统在被设计、实现、部署与运行之前,都必须无条件接受的前提性约束;
若违背该约束,系统即便在局部或短期内可运行,也不具备工程上的正当性。
工程第一性原则具有三个显著特征。
第一,它先于方法论而存在 。
它不回答"如何实现",而回答"是否允许这样实现"。
第二,它具有否决权 。
一项设计若违反第一性原则,不是"有待优化",而是"不可交付"。
第三,它贯穿系统全生命周期 。
从需求定义、架构设计、验证测试到运行治理,第一性原则始终有效,且不可被阶段性目标所悬置。
在传统工程领域,这类原则并不陌生。例如,控制工程中的闭环稳定性原则,安全工程中的失效可诊断原则,航空航天工程中的冗余与因果可追溯原则。它们并不规定算法或器件的选型,却决定了系统是否有资格进入现实世界运行。
随着具身智能系统开始进入高风险、强责任的现实场景,这一领域同样不可避免地需要自己的工程第一性原则。
二、具身智能为何迫切需要新的工程第一性原则
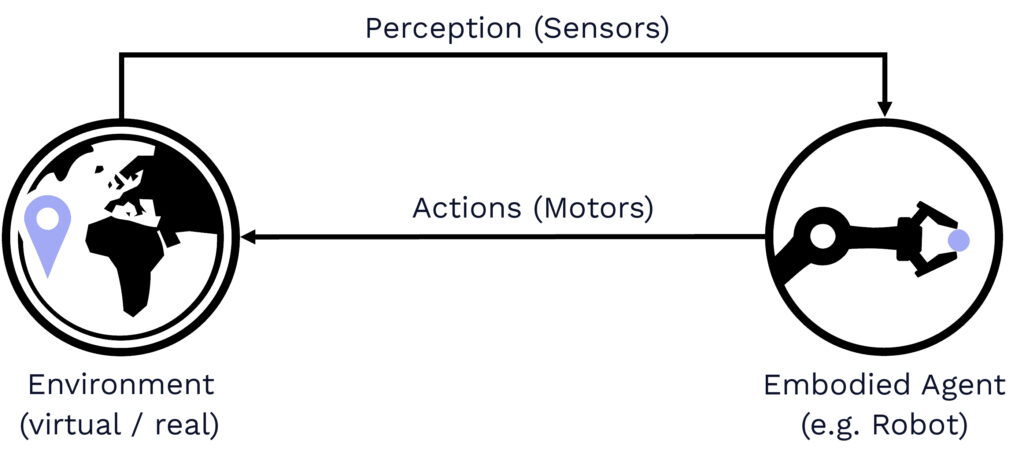
具身智能系统与传统信息系统的根本差异在于:
它们不仅生成信息或决策,而且通过物理或制度性行动,直接改变现实世界的状态。
一旦系统具备以下特征:
-
具有自主感知与决策能力
-
能够在现实环境中持续行动
-
其行为后果不可完全由人类即时接管
那么,该系统的失败将不再是"功能失效",而是现实后果事件:安全事故、生产事故、医疗风险,乃至法律与伦理责任问题。
在这一背景下,单纯依赖性能指标、统计正确率或经验性最佳实践,已不足以支撑工程交付的正当性。工程领域必须回答一个更根本的问题:
一个具身智能系统,凭什么被允许在现实世界中持续行动?
具身机械主义,正是在这一问题压力下,作为工程第一性原则而显现其必要性。
三、具身机械主义的原则性内涵
从工程第一性原则的角度看,具身机械主义并非一种技术方案,也不是某一认知理论的立场选择,而是一项前提性要求。其核心可以概括为如下命题:
任何具身智能系统,若要被工程化交付,
必须被构建并运行在一个由明确机制支撑的、具身的、受约束的认知---行动闭环之中,
且该闭环对其行动后果具备可解释性、可预测性与可治理性。
这一命题之所以具有第一性原则的地位,在于它直接约束了具身智能系统的存在方式,而非表现形式。
四、作为第一性原则,具身机械主义所确立的四项不可绕过的工程前提
(一)闭环性前提:智能必须以真实闭环的形式存在
具身机械主义首先否认任何"非闭环"的智能具备工程完备性。
智能系统必须运行在一个真实的感知---决策---行动---后果---再感知的闭环中。这里的"真实",既包括物理层面的反馈,也包括制度、规则或责任层面的反馈。
任何仅在离线评估、仿真空间或统计意义上成立的"智能表现",都不能替代这一闭环前提。
在工程意义上,无法闭环的系统,不构成可交付的具身智能系统。
(二)机制前提:系统行为必须由可指认机制承担
具身机械主义要求,系统的行为来源必须是可指认、可分析、可复现的机制,而非统计偶然或经验拟合。
这里的"机制"不是抽象解释,而是工程意义上的因果结构:
明确的系统构成、状态转移关系以及稳定的因果活动模式。
这一前提的工程含义在于:
系统的失败必须被解释为机制失效,而非"模型不走运"。
只有在机制层面承担行为后果,系统才具备被调试、被修复、被审计的可能性。
(三)约束内生前提:约束必须成为认知结构的一部分
在具身机械主义框架中,约束并非外挂式的安全补丁,而是认知结构的内生组成部分。
物理极限、操作规程、法律边界、风险容忍区间,都必须在系统的决策与行动生成过程中被显式表达和持续施加。
这意味着,任何依赖"事后兜底"的安全设计,在工程第一性原则层面都是不充分的。
一个只有在失败后才被约束的系统,不满足具身机械主义的基本要求。
(四)后果一致性前提:系统必须对行动后果负责
具身机械主义最具工程分量的要求在于:
系统必须对其行动后果的一致性负责,而不仅是对决策质量负责。
工程评估的对象不再只是准确率、回报值或性能曲线,而是:
-
行动后果的可预期区间
-
极端情况下的行为边界
-
近失事件与风险累积路径
在这一原则下,"看起来合理"的行为并不构成正当性依据。
只有后果可控、可解释、可治理的系统,才具备工程上的合法性。
五、为何说拒绝这一原则,工程责任将被转移至工程之外
当一个具身智能系统在设计阶段拒绝为其行动后果建立机制一致性与约束闭环时,它并不会消失风险,只会推迟风险的归属。
结果往往是:
工程阶段的解释缺席,最终由事故调查、法律诉讼或伦理争议来补位。
从这一意义上说,具身机械主义不仅是一项工程原则,更是一种责任前移机制 。
它要求工程系统在进入现实世界之前,就对自身的行为后果给出可接受的解释与约束结构。
六、结论:具身机械主义的第一性地位
综上所述,具身机械主义之所以是一种工程第一性原则,不在于它提出了更先进的智能形式,而在于它回答了一个工程无法回避的根本问题:
在什么条件下,一个具身智能系统才有资格被交付、被部署,并被允许持续行动于现实世界之中。
它不是让系统"更聪明"的方法,而是界定了什么样的智能才是工程上被允许存在的智能。
在具身智能不可避免走向现实世界的时代,这一原则并非可选项,而是工程理性自身的要求。