1、搭建基础环境
1、以Ros-noetic为例创建工作区间:
1. 创建工作空间目录 mkdir -p ~/catkin_ws/src cd ~/robot_ws/src
2. 这里的关键步骤:请将你上传的源码包中的以下 4 个文件夹复制到 ~/robot_ws/src 下:
- ar_pose # - oryxbot_description # - relative_move # - pid_lib
这里以moliyuanbao/relative_move/src at main · Xk-fly/moliyuanbao我所上传的源码为例
注意:不要直接把整个 xk-fly 文件夹放进去,要剥离出这 5 个核心功能包。
2、安装仿真依赖:
1. 下载 ar_track_alvar 源码 (源码脚本里提到的,这一步必须做,主要是涉及到二维码)
cd ~/catkin_ws/src
git clone https://gitee.com/reinovo/ar_track_alvar.git
2. 安装 ROS Noetic 的常用控制与仿真依赖 (防止报"缺少 controller"或"moveit"错误)
sudo apt update
sudo apt install ros-noetic-moveit \
ros-noetic-ros-control \
ros-noetic-ros-controllers \
ros-noetic-gazebo-ros-control \
ros-noetic-joint-state-controller \
ros-noetic-effort-controllers \
ros-noetic-position-controllers \
ros-noetic-driver-base \
ros-noetic-ackermann-msgs
以上安装包直接复制多行内,一行会报错
3、配置仿真模型与插件 (Compatibility Fix)
1>配置模型文件:
将压缩包里的models内容复制到~/.gazebo/models/目录下(.gazebo为隐藏文件,在主目录下按ctrl+h会显示)
2>配置插件:
1>在源码包 gazebo_plugins 里有两个文件夹:contact_plugin_18-04_g9 (对应 Ubuntu 18.04) 和 contact_plugin_20-04_g11。 我的系统是ros-noetic必须使用 contact_plugin_20-04_g11,以下进行修改:
编写~/.bashrc文件:
export GAZEBO_PLUGIN_PATH=${GAZEBO_PLUGIN_PATH}:/你的实际路径/gazebo_plugins/contact_plugin_20-04_g11
2、编译与设置环境
1、编译环境:
切换工作区间cd ~/robot_ws
清理构建缓存 rm -rf build/ devel/
重新编译 catkin_make
2、设置环境变量:
cd ~/robot_ws
source devel/setup.bash(每次打开新的终端都要输入来刷新)
或者是写入到~/.bashrc文件里:source ~/robot_ws/devel/setup.bash(打开终端自动生效)
3、加载Gazebo仿真与测试
1、# 这一步是启动环境(底盘、移动、Gazebo世界)
roslaunch oryxbot_description gazebo.launch
PS:
观察与等待:
-
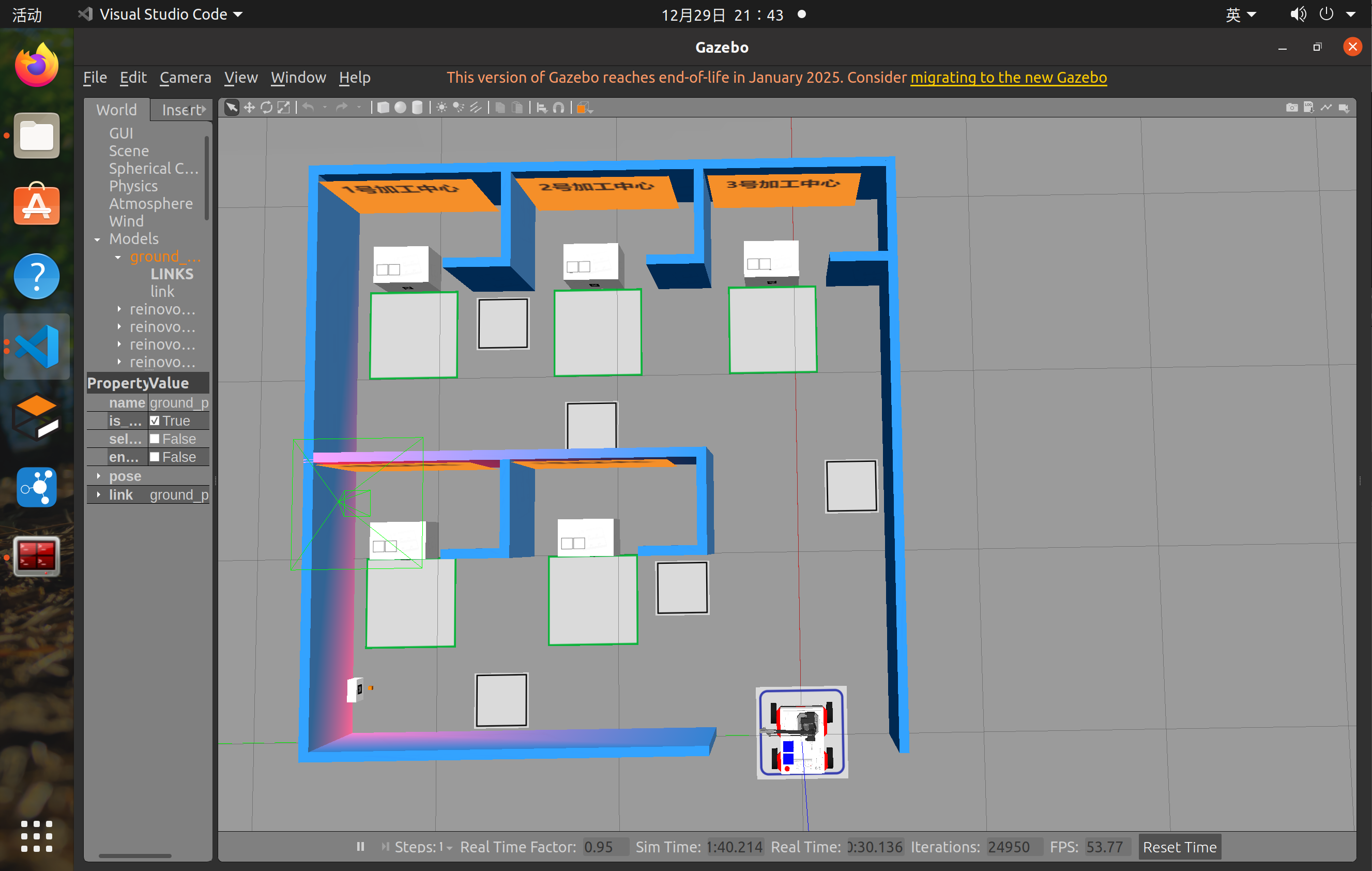
Gazebo 界面:应该会自动弹出一个 3D 仿真窗口。
-
加载过程:第一次启动可能会卡顿几分钟(因为在下载/加载模型),请耐心等待。
-
检查场景 :能看到 机器人 (Oryxbot),且看到 场地围栏 和 加工台 (类似课程设计要求图中的布局),加工台上贴有 AR 码(黑白相间的二维码图片)
2、启动底盘导航与对接功能 (Terminal 2)
这个 Launch 文件会启动两个关键服务:
-
relative_move:让底盘走直线(基于里程计)。 -
base_pose_adjust:识别底盘摄像头的 AR 码,用于精准泊车。
-
打开第 2 个终端,执行:
source ~/robot_ws/devel/setup.bash roslaunch oryxbot_description ar_base_gazebo.launch注意:执行后,终端会停在那里不动(可能会显示
started),这是正常的! 它启动的是后台服务节点,不会弹新窗口。
3、启动机械臂抓取功能 (Terminal 3)
这个 Launch 文件会启动:
-
hand_ar:识别手部摄像头的 AR 码,用于抓取定位。 -
pick_ar_gazebo:提供"去抓取"的服务接口。
-
打开第 3 个终端,执行:
source ~/robot_ws/devel/setup.bash roslaunch oryxbot_description pick_ar_gazebo.launch同样,这里也不会弹新窗口,只要不报红色 Error 就是成功。
4、 测试识别能力 : 在 Gazebo 中,手动点击工具栏的"十字箭头"图标,把机器人拖拽到 5号加工中心(那个台子上贴着 AR 码)的正前方,距离大概 0.5 米,让底盘前方的摄像头正对着码。
然后在终端 4 执行:
rostopic echo /ar_pose_marker预期结果:你应该能看到数据疯狂刷屏(显示检测到的 ID 和 position)。如果有数据,说明机器人已经能"看懂"AR码了。
以上就是对其简单功能的测试,针对于抽到的任务需要进行定制修改。
4、添加二维码物料
1、针对抽取到的任务进行物料编辑,这里以"将机器入buff上 Id-3物料放置到5#加工中心;将id-9物料从1#加工中心取回。"为例展开说明:
2、首先明确需要两个物料,一个是id3一个是id9,这里可以参考"~/robot_ws/src/models/small_marker_charge_pile"文件格式来编写相应的物料,以下以id3的创建为例,id9也一样
1>在~/.gazebo/models/下创建文件夹marker_id3文件夹
2>创建materials文件夹用于存储图片和描述如何加载到gazebo中,在其目录下创建以下文件:
materials/
├── scripts
│ └── reinovo.material
└── textures
├── id3.png
└── id9.png
以下是reinovo.material文件内容:
bash
material reinovo/id3_marker
{
receive_shadows on
technique
{
pass
{
ambient 1.0 1.0 1.0 1.0
diffuse 1.0 1.0 1.0 1.0
specular 0.5 0.5 0.5 1.0
lighting on
texture_unit
{
texture id3.png
}
}
}
}
material reinovo/id9_marker
{
receive_shadows on
technique
{
pass
{
ambient 1.0 1.0 1.0 1.0
diffuse 1.0 1.0 1.0 1.0
specular 0.5 0.5 0.5 1.0
lighting on
texture_unit
{
texture id9.png
}
}
}
}这里将id3和id9一块声明了,不影响使用。
3、创建模型文件用来加载二维码图片放到小白块上并添加物理属性:
marker_id3/
├── materials
│ ├── scripts
│ │ └── reinovo.material
│ └── textures
│ ├── id3.png
│ └── id9.png
├── model.config
└── model.sdf
meshes文件内容不用管,这里model.sdf是模型文件,类似于3D建模,.config为配置文件进行版本信息声明于维护,以下为相应的内容,先写.config文件,其次是.sdf
bash
<?xml version="1.0" ?>
<model>
<name>id3_marker</name>
<version>1.0</version>
<sdf version="1.7">model.sdf</sdf>
<author>
<name></name>
<email></email>
</author>
<description></description>
</model>
bash
<?xml version='1.0'?>
<sdf version='1.7'>
<model name='marker_id3'>
<link name='link_0'>
<inertial>
<mass>0.1</mass> <inertia>
<ixx>0.0001</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.0001</iyy>
<iyz>0</iyz>
<izz>0.0001</izz>
</inertia>
<pose>0 0 0 0 0 0</pose>
</inertial>
<pose>0 0 0.015 0 0 0</pose>
<gravity>1</gravity>
<self_collide>0</self_collide>
<kinematic>0</kinematic>
<visual name='visual'>
<geometry>
<box>
<size>0.03 0.03 0.03</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/White</name>
</script>
</material>
</visual>
<collision name='collision'>
<geometry>
<box>
<size>0.03 0.03 0.03</size>
</box>
</geometry>
<surface>
<friction>
<ode>
<mu>100</mu> <mu2>100</mu2>
</ode>
</friction>
<contact>
<ode>
<kp>10000000.0</kp>
<kd>1.0</kd>
<min_depth>0.001</min_depth>
<max_vel>0.1</max_vel>
</ode>
</contact>
</surface>
</collision>
</link>
<link name='link_1'>
<inertial>
<mass>0.001</mass> <inertia>
<ixx>0.00001</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.00001</iyy>
<iyz>0</iyz>
<izz>0.00001</izz>
</inertia>
</inertial>
<pose>0 0 0.0305 0 0 0</pose>
<visual name='visual'>
<geometry>
<box>
<size>0.028 0.028 0.001</size>
</box>
</geometry>
<material>
<script>
<uri>model://small_marker_charge_pile/materials/scripts</uri>
<uri>model://small_marker_charge_pile/materials/textures</uri>
<name>reinovo/id3_marker</name>
</script>
</material>
</visual>
</link>
<joint name='link_0_JOINT_0' type='fixed'>
<parent>link_0</parent>
<child>link_1</child>
<pose>0 0 0 0 0 0</pose>
</joint>
</model>
</sdf>5、添加到Gazebo并创建新世界模型
1、打开gazebo世界文件:
暂定仿真运行:左下角有个暂停按钮,点击后物理效果将会取消,便于调整模型位置
2、左侧insert插入模型:
1>提前将模型路径添加到~/.bashrc文件里,export等等
2>然后选中需要插入的模型,这里以自己定义的id3_marker物料为例,放入到模型里
3>选中模型,按T调整位置、按R调整位姿、按Esc退出调整
4>退出后点击左下角的运行,看看效果
2、保存世界文件:
点击左上角的file文件选择保存或者另存为,这里建议替换到原先加载的世界模型,如果另存为新的.world文件,则需要修改gazebo.launch文件的参数(新生成的.world文件路径)
6、控制测试:
1、键盘控制小车运动(测试后可关闭,将小车移到初始位置):
sudo apt install ros-noetic-teleop-twist-keyboard安装控制包
执行控制命令:rosrun teleop_twist_keyboard teleop_twist_keyboard.py
2、编写主控脚本 (Python)
cd ~/robot_ws/src/oryxbot_description/src/
touch mission_controller.py
gedit mission_controller.py
python
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rospy
import time
from geometry_msgs.msg import Pose, Pose2D
from std_srvs.srv import Empty
from arm_controller.srv import PickPlace, move
from relative_move.srv import SetRelativeMove
from ar_pose.srv import Track
# ================= 🗺️ 核心坐标与参数配置 =================
# --- 1. 场地关键点 (根据你的标定数据) ---
START_X = 0.034
START_Y = -0.001
# 5号加工中心 (任务一:上料点)
STATION_5_X = 0.755
STATION_5_Y = 1.162
STATION_5_ID = 5
# 1号加工中心 (任务二:取料点)
STATION_1_X = 2.221
STATION_1_Y = 2.144
STATION_1_ID = 1
# --- 2. 机械臂动作参数 (单位: mm) ---
# Buffer (车上的储物槽)
# 设定:左侧放ID-3,右侧放ID-9 (为了防止打架)
BUFFER_LEFT_X = 0.0 # 前后
BUFFER_LEFT_Y = 180.0 # 左右 (左侧)
BUFFER_RIGHT_X = 0.0
BUFFER_RIGHT_Y = -180.0 # 右侧 (如果buff够宽) 或者就用同一个位置分先后
BUFFER_Z_LIFT = 100.0 # 抬起高度
BUFFER_Z_GRAB = 45.0 # 抓取高度
# 加工台交互位置
TABLE_EXTEND_X = 300.0 # 伸出距离
TABLE_EXTEND_Y = 0.0 # 正前方
TABLE_Z_DROP = 200.0 # 放置高度
TABLE_Z_HOVER = 240.0 # 悬停高度
# ===============================================================
class MissionCommander:
def __init__(self):
rospy.init_node('mission_commander', anonymous=True)
rospy.loginfo(">>> 正在连接机器人底层服务...")
try:
rospy.wait_for_service('/relative_move', timeout=10)
rospy.wait_for_service('/ar_track', timeout=10)
rospy.wait_for_service('/pick_ar', timeout=10)
rospy.wait_for_service('/goto_position', timeout=10)
rospy.wait_for_service('/swiftpro/on', timeout=10)
except rospy.ROSException:
rospy.logerr("连接超时!请检查 run_mission.sh 是否正确启动了所有节点。")
exit(1)
self.srv_move_base = rospy.ServiceProxy('/relative_move', SetRelativeMove)
self.srv_align = rospy.ServiceProxy('/ar_track', Track)
self.srv_pick_ar = rospy.ServiceProxy('/pick_ar', PickPlace)
self.srv_arm_move = rospy.ServiceProxy('/goto_position', move)
self.srv_pump_on = rospy.ServiceProxy('/swiftpro/on', Empty)
self.srv_pump_off = rospy.ServiceProxy('/swiftpro/off', Empty)
rospy.loginfo(">>> 系统就绪。")
def move_chassis(self, target_x, target_y):
"""底盘移动 (带避障)"""
dx = target_x - START_X
dy = target_y - START_Y
rospy.loginfo(f"🚗 导航启动 -> 目标:({target_x:.2f}, {target_y:.2f})")
try:
goal_pose = Pose2D()
goal_pose.x = dx
goal_pose.y = dy
goal_pose.theta = 0.0
# 开启避障: avoid_obstacle=True
self.srv_move_base(goal_pose, "odom", True, False)
time.sleep(1)
except Exception as e:
rospy.logerr(f"底盘移动失败: {e}")
def align_tag(self, tag_id):
"""视觉精准泊车"""
rospy.loginfo(f"👀 视觉对准 -> ID-{tag_id}")
try:
self.srv_align(ar_id=tag_id, goal_dist=0.3)
time.sleep(1)
except Exception as e:
rospy.logwarn(f"对准失败 (可能已被挡住): {e}")
def move_arm(self, x, y, z):
"""机械臂简单移动"""
p = Pose()
p.position.x = float(x)
p.position.y = float(y)
p.position.z = float(z)
self.srv_arm_move(pose=p)
time.sleep(0.8)
# ================= 任务流程 =================
def run_task_1(self):
"""任务一:将 Buffer 里的 ID-3 送到 5号台"""
rospy.loginfo("\n========== [任务一] 上料 (ID-3 -> 5号台) ==========")
# 1. 导航
self.move_chassis(STATION_5_X, STATION_5_Y)
self.align_tag(STATION_5_ID)
# 2. 机械臂动作 (盲抓 Buffer -> 放台子)
rospy.loginfo(" >>> 动作:从车上抓取 ID-3 放到台面")
self.move_arm(150, 0, 150) # 复位
# 抓取 Buffer 左侧
self.move_arm(BUFFER_LEFT_X, BUFFER_LEFT_Y, BUFFER_Z_LIFT)
self.move_arm(BUFFER_LEFT_X, BUFFER_LEFT_Y, BUFFER_Z_GRAB)
self.srv_pump_on()
time.sleep(0.5)
self.move_arm(BUFFER_LEFT_X, BUFFER_LEFT_Y, BUFFER_Z_LIFT)
# 放置到台面
self.move_arm(TABLE_EXTEND_X, TABLE_EXTEND_Y, TABLE_Z_HOVER)
self.move_arm(TABLE_EXTEND_X, TABLE_EXTEND_Y, TABLE_Z_DROP)
self.srv_pump_off()
time.sleep(0.5)
self.move_arm(150, 0, 150) # 收回
# 3. 返回起点
rospy.loginfo(" >>> 返回起点...")
self.move_chassis(START_X, START_Y)
def run_task_2_setup(self):
"""任务二(准备阶段):把 ID-9 送到 1号台 (帮你布置考场)"""
rospy.loginfo("\n========== [任务二·准备] 布置 ID-9 到 1号台 ==========")
rospy.loginfo("提示:请确保你已经在 Gazebo 里把 ID-9 方块放到了小车Buffer上!")
# 1. 导航
self.move_chassis(STATION_1_X, STATION_1_Y)
self.align_tag(STATION_1_ID)
# 2. 放置动作 (盲抓 Buffer -> 放台子)
# 假设 ID-9 也放在 Buffer 左侧 (因为任务一已经把那里的 ID-3 拿走了,空出来了)
self.move_arm(150, 0, 150)
self.move_arm(BUFFER_LEFT_X, BUFFER_LEFT_Y, BUFFER_Z_LIFT)
self.move_arm(BUFFER_LEFT_X, BUFFER_LEFT_Y, BUFFER_Z_GRAB)
self.srv_pump_on()
time.sleep(0.5)
self.move_arm(BUFFER_LEFT_X, BUFFER_LEFT_Y, BUFFER_Z_LIFT)
self.move_arm(TABLE_EXTEND_X, TABLE_EXTEND_Y, TABLE_Z_HOVER)
self.move_arm(TABLE_EXTEND_X, TABLE_EXTEND_Y, TABLE_Z_DROP)
self.srv_pump_off()
time.sleep(0.5)
self.move_arm(150, 0, 150)
# 3. 返回起点 (准备开始正式考试)
rospy.loginfo(" >>> 布置完成,返回起点,准备正式取料...")
self.move_chassis(START_X, START_Y)
time.sleep(2)
def run_task_2_execute(self):
"""任务二(正式阶段):把 ID-9 从 1号台取回来"""
rospy.loginfo("\n========== [任务二·正式] 从 1号台取回 ID-9 ==========")
# 1. 导航
self.move_chassis(STATION_1_X, STATION_1_Y)
self.align_tag(STATION_1_ID)
# 2. 智能抓取 (使用 pick_ar 视觉识别)
rospy.loginfo(" >>> 动作:视觉寻找 ID-9 并抓回")
# 设定放回目标 (放回 Buffer)
buffer_target = Pose()
buffer_target.position.x = BUFFER_LEFT_X
buffer_target.position.y = BUFFER_LEFT_Y
buffer_target.position.z = BUFFER_Z_GRAB + 20 # 稍微高一点
# 调用视觉抓取服务
self.srv_pick_ar(number=9, mode=0, pose=buffer_target)
# 3. 返回起点
time.sleep(2)
rospy.loginfo(" >>> 取料完成,返回起点...")
self.move_chassis(START_X, START_Y)
def run(self):
# 1. 执行任务一
self.run_task_1()
time.sleep(3)
# 2. 执行任务二 (按照你的思路:先送过去,再取回来)
self.run_task_2_setup() # 阶段A:送过去
self.run_task_2_execute() # 阶段B:取回来
rospy.loginfo("\n🏆 所有任务圆满结束!")
if __name__ == "__main__":
cmdr = MissionCommander()
# ⚠️ 重要提示:
# 为了让代码能抓到东西,运行脚本前,请在 Gazebo 里
# 手动把 ID-3 和 ID-9 两个方块,拖拽放到小车后斗上!
cmdr.run()3、缺乏机械臂的控制核心,需要手动启动:
- 启动 IK (逆运动学) 节点
这是机械臂的"小脑",负责把坐标算出角度。
source ~/robot_ws/devel/setup.bash
rosrun oryxbot_description ik_swiftpro(注意:执行后终端可能没有输出并卡住,这是正常的,它在后台等待计算请求。)
以上是整体控制的流程。
7、一键脚本启动
结合上述内容,编写一键脚本启动文件:
bash
#!/bin/bash
# 定义清理函数:脚本退出时自动执行
cleanup() {
echo "正在关闭所有进程..."
# 杀掉所有后台子进程
kill $(jobs -p) 2>/dev/null
# 强制清理ROS和Gazebo残留
killall -9 gzserver gzclient rosmaster rosout nodelet 2>/dev/null
echo ">>> 环境已清理完毕,随时可以再次启动。"
}
# 捕获退出信号 (Ctrl+C)
trap cleanup EXIT
echo "=========================================="
echo " 课程设计任务一键启动脚本"
echo "=========================================="
# 1. 环境清理
echo "[1/4] 清理旧环境..."
killall -9 gzserver gzclient rosmaster 2>/dev/null
sleep 2
# 2. 加载环境变量
source ~/robot_ws/devel/setup.bash
# 3. 启动仿真环境 (底盘+视觉+Gazebo)
echo "[2/4] 正在启动仿真环境 (Gazebo)..."
# 注意:使用 nohup 或 & 后台运行,并屏蔽日志输出以免刷屏
roslaunch oryxbot_description gazebo.launch > /dev/null 2>&1 &
PID_GAZEBO=$!
echo " 等待 Gazebo 加载 (15秒)..."
sleep 15
# 4. 启动任务层 (Pick AR + 机械臂IK)
echo "[3/4] 正在启动控制节点 (IK & Pick)..."
echo "启动底盘导航与对接功能..."
roslaunch oryxbot_description ar_base_gazebo.launch> /dev/null 2>&1 &
sleep 5
echo "启动机械臂抓取功能..."
roslaunch oryxbot_description pick_ar_gazebo.launch > /dev/null 2>&1 &
sleep 5
echo " 启动 IK (逆运动学) 节点..."
rosrun oryxbot_description ik_swiftpro > /dev/null 2>&1 &
sleep 3
# 5. 运行 Python 主控脚本
echo "[4/4] 启动任务控制脚本..."
echo "================ 日志输出 ================"
# 切换到脚本所在目录运行
cd ~/robot_ws/src/oryxbot_description/src/
python3 mission_controller.py
# 脚本运行结束后,等待用户按键再退出
echo "=========================================="
echo "任务脚本已结束。"
echo "按 Enter 键关闭仿真并退出..."
read dummy