一、研究背景(Background)
相关领域概要:
- 目标检测(Object Detection) :给定一张图像,找出其中所有感兴趣物体的边界框(Bounding Box) + 类别标签。是计算机视觉最基础、最核心的高层任务之一。
- 主流范式(2019年之前) :几乎所有先进检测器(如 Faster R-CNN、SSD、RetinaNet、YOLOv3)都依赖 锚框(Anchor Boxes)------即在特征图每个位置预设一组不同尺度、长宽比的候选框,再通过分类+回归进行精修。
🔍 举个例子:
在一张 800×800 的图上,用特征金字塔(FPN)生成 5 层特征图,每层每个位置放 9 个 anchor(不同大小/比例),总计约 18 万个预设框------其中 >99% 是负样本(无物体),训练极不均衡。
- 语义分割(Semantic Segmentation) :FCN(全卷积网络)革命性地统一了 dense prediction 任务(如分割、深度估计、关键点检测等),用"每个像素预测语义类别"的范式,结构极其简洁、高效、端到端。
关键矛盾浮现:
为什么同样是 instance-level(实例级)任务,目标检测却要靠"anchor 这种 middle-man(中间人)"?而分割直接 per-pixel(逐像素)预测就能做好?
目标检测能不能也像分割一样,纯粹用 FCN、无 proposal、无 anchor、逐像素预测?
二、问题(Challenge)
核心问题:
能否构建一个完全卷积的、无锚框的目标检测器,在性能上媲美甚至超越锚框方案?
为什么这个问题极具挑战性?------四大困难(因果链条)
| 困难编号 | 挑战描述 | 因果性解释(为什么难) |
|---|---|---|
| C1:召回率低(Low Recall) | 如果只在某一层特征图预测(如 stride=16),很多小物体可能完全"错过"------没有像素落在其框内 → 无法被召回 | 因为 stride 大 → 特征图稀疏;而 anchor 可密集放置弥补稀疏性 |
| C2:重叠歧义(Ambiguity in Overlaps) | 若两个 GT 框重叠(如人骑马),一个像素点落在交集中,它该回归哪个框? → 回归冲突:分类该用哪类?坐标该学谁? | 因为一个像素只能预测一个 (l,t,r,b)+class;而 anchor 用 IoU 匹配机制可分配归属,但 FCN 没有这种机制 |
| C3:低质量预测泛滥(Low-quality Detections) | 即使一个像素在 GT 框内,若它在框的边缘(远离物体中心),回归的框往往不准(如图 1 右)、置信度却可能很高 → 大量假阳性干扰 NMS | 因为所有框内像素都被平等对待为正样本,但边缘像素"感知野"跨物体/背景,回归能力天然弱 |
| C4:设计复杂度高(Design Complexity) | anchor 方案需调超参:anchor 尺寸/比例/数量、IoU 阈值(正负样本划分)、匹配策略等,极其敏感(±4% AP 波动) | 因为 anchor 是人为先验,脱离数据分布;调参靠经验+试错,难以泛化到新场景 |
💡 问题的价值 :
若能解决,将使检测器像分割一样简洁、统一、可迁移,彻底摆脱"锚框霸权"------这是对检测本质的重新思考。
三、作者的关键发现(Finding)
✅ 这不是一个"技术修补"问题,而是一个"视角转换"问题 。
FCOS 的 Finding 不是"我们加了一个 center-ness 分支",而是:
🔑 核心洞察(The Finding):
目标检测的"框回归"任务天然具有空间结构:物体中心区域的像素,回归能力更强、更可靠;而边缘像素虽然也在框内,但其回归质量随远离中心而指数衰减。
------ 因此,无需人为设计 anchor 来"筛选高质量样本",而是让网络自己学出:每个像素预测的框到底有多"靠谱"。
换句话说:"位置"本身已蕴含"质量"信息,只需建模这种关系(即 center-ness),就能自动抑制低质量预测,无需 IoU 阈值等 heuristics。
为什么这个 finding 颠覆传统?
-
传统观点(anchor-based):
"框是中心+宽高定义的,必须用 anchor 提供初始猜测;远离中心的点天生不可靠 → 直接丢弃(如 YOLOv1)。"
-
FCOS 观点:
"框是四边距离
(l, t, r, b)定义的;框内所有点理论上都能回归------只要我们告诉网络:某些点'虽在框内,但质量差',让它学会降权即可。"→ 将'如何筛选样本'的问题,转化为'如何评估样本质量'的问题。
🌰 举个生动例子:
想象你在教小朋友画矩形:
- Anchor 方法:你先画一堆虚线矩形(anchor),说:"挑一个最像的,再改改边。"
- FCOS 方法 :你给一张白纸,说:"任意一点,只要你在目标矩形里,就量它到四边的距离,报给我。"
- 但小朋友在角落画的线经常歪 → 你补一句:"你报数时,顺便自评一下:'我离中心多远?越远,我说的数字越不可信'。"
- 你收答案时,把"自评分"乘上"自信程度",低分的自动被过滤。
→ 无需预设模板,靠自我评估实现高质量输出。
这个 finding 的精妙在于:
✅ 它把检测的内在矛盾 (所有点都可用 vs. 边缘点质量差)
✅ 它兼容 FCN 的 pure 理念 ------不增加采样规则(如 "只用中心 1/3 区域"),只加一个极轻量的"质量评估头"
✅ 它统一了密集预测范式:分割是"像素级语义",检测是"像素级几何 + 像素级质量"
四、方法(Method)
输入:
- 一张 RGB 图像
I ∈ R^{H×W×3}
整体流程(三步走):
Step 1:构建多尺度特征金字塔(FPN)
- Backbone(如 ResNet)提取
C3~C5 - FPN 生成
P3~P7,strides = {8, 16, 32, 64, 128} - 目的:解决 C1(低召回)和 C2(重叠歧义)
Step 2:逐像素预测(FCN Head)
对每一层 Pi 的每个位置 (x, y),预测:
p_{x,y} ∈ R^{80}:类别置信度(80 类 COCO)t_{x,y} = (l, t, r, b) ∈ R^4:到当前框四边的距离(经exp(si·x)映射到正数)c_{x,y} ∈ [0,1]:center-ness,由单独分支预测(和分类分支并行)
训练目标(正样本条件):
-
若
(x,y)落入某个 GT 框Bi,则为正样本;若落入多个,选面积最小者(缓解歧义) -
回归目标:
l* = x - x0, t* = y - y0, r* = x1 - x, b* = y1 - y -
Center-ness(核心设计!):
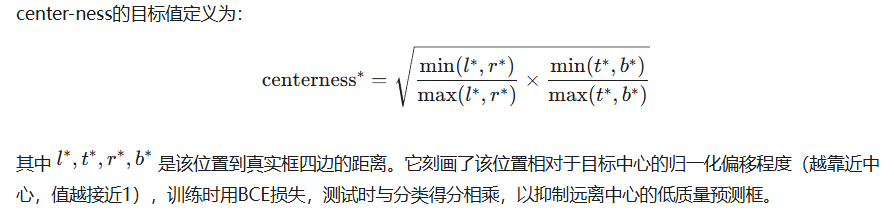
✅ 这个公式妙在:
- 当点在框中心:
l=r, t=b→ centerness = 1 - 当点在边缘(如左边界):
l→0, r→w→ centerness→0 - 对长宽比鲁棒(归一化比值)
- 当点在框中心:
📌 关键技巧:为每个 FPN 层
Pi学一个可训练标量si,让exp(si·x)自动适配不同尺度范围(原 exp(x) 对大框回归不足)。
Step 3:推理(无 anchor!)
-
对每个
(x,y),若p_{x,y} > 0.05,则生成框:x0 = x - l, y0 = y - t, x1 = x + r, y1 = y + b -
最终得分 =
classification_score × center-ness_score -
标准 NMS 后输出
五、结论(Results & Insights)
主要实验结果(COCO test-dev, single-scale):
| 方法 | Backbone | AP | AP₅₀ | AP₇₅ |
|---|---|---|---|---|
| RetinaNet | ResNet-101-FPN | 39.1 | 59.1 | 42.3 |
| FCOS (Ours) | ResNet-101-FPN | 41.5 | 60.7 | 45.0 |
| FCOS++ | ResNeXt-64x4d-101-FPN | 44.7 | 64.1 | 48.4 |
✅ 关键结论:
- FCOS 超越 RetinaNet (+2.4 AP),证明无 anchor 可做得更好;
- Center-ness 至关重要 :ablation 实验(Table 4)显示:去掉 center-ness,AP 从 37.1 → 33.5(-3.6);
- BPR(Best Possible Recall)不是瓶颈:FCOS 达 98.4%,仅比 anchor 最优值(99.23%)低 0.8%,实际检测中 recall 差异可忽略(Fig. 4--6 PR 曲线末端 recall <80%);
- 歧义样本影响极小 :仅 1.5% 的检测框来自跨类重叠区域(Table 2),且网络能有效处理;
- 可迁移到两阶段:将 FCOS 作 RPN,AR₁₀₀ 提升 8.1%(Table 6),说明其高质量 proposal 能力。
额外重大发现(Finding 的验证):
🔍 图 7 的可视化是"神来之笔":
- 左图 (无 center-ness):大量点在对角线
y = x下方 → 高分(x 轴)但低 IoU(y 轴),即高置信度低质量预测 - 右图 (有 center-ness):这些点被"推左" → 分数被 center-ness 压低 → NMS 可滤除
→ 直接验证了 center-ness 的降权机制有效!
🔍 PR 曲线(Fig. 4--6)揭示深层价值:
- 在严苛 IoU=0.9 时,FCOS 比 RetinaNet AP 高 +2.7 (Table 7)
→ 说明 FCOS 回归更准 !
→ 原因:利用了更多 foreground 像素训练回归器(anchor 仅用 IoU > 0.5 的 anchor 作正样本)
关键术语总结(中英对照 + 例子)
| 英文 | 中文 | 解释 + 例子 |
|---|---|---|
| Anchor Box | 锚框 | 预设的参考框,用于初始化检测。例:RetinaNet 在每层特征图每个位置放 9 个不同大小/比例的框(如 32×32, 64×32, 128×128 等) |
| FPN (Feature Pyramid Network) | 特征金字塔网络 | 自顶向下 + 横向连接,生成多尺度特征图。例:P3(stride=8)检小物体,P7(stride=128)检大物体 |
| BPR (Best Possible Recall) | 最佳可能召回率 | 一个检测器理论上能召回的 GT 框最大比例(不考虑分类/回归精度)。例:FCOS 的 BPR=98.4%,意味着 1000 个 GT 框最多漏掉 16 个 |
| Ambiguous Sample | 歧义样本 | 落在多个 GT 框交集内的像素点,难以确定归属。例:人和马重叠区域中的一点,该回归"人"还是"马"? |
| Center-ness | 中心度 | 衡量一个像素到其负责物体中心的归一化距离,值∈0,1。核心创新! |
| 例:框中心点 → center-ness=1;靠近左边界的点 → center-ness≈0.1 | ||
| Per-pixel Prediction | 逐像素预测 | FCN 风格:特征图每个位置独立预测,无 ROI Pooling/Proposal。例:语义分割每个像素输出类别;FCOS 每个像素输出 (l,t,r,b)+cls+centerness) |
| IoU Loss / GIoU Loss | IoU 损失 / 泛化 IoU 损失 | 回归损失函数。IoU Loss 直接优化预测框与 GT 的 IoU(比 L1/L2 更符合检测目标);GIoU 还惩罚"预测框与 GT 的外接矩形面积",缓解无交集时梯度消失 |
总结:FCOS 的哲学意义
FCOS 不是一篇"加了个新模块"的技术论文,而是一次范式革命:
- 它证明:目标检测的本质,是几何的逐像素建模,而非"先猜框再修正";
- 它揭示:位置信息本身蕴含质量信息,无需人工规则筛选样本;
- 它实现:检测 ≈ 分割 + 几何回归 + 质量评估,真正统一 dense prediction;
- 它启发:"简单即强大"------去掉 anchor 后,参数更少、超参更少、训练更快、性能更高。
正如文末所言:
"我们鼓励社区重新思考 anchor boxes 的必要性------它们曾被认为是检测的'金标准',但现在,或许只是历史的惯性。"
这篇工作,是 deep learning 中"第一性原理思考"的典范:回到问题本质,敢于质疑共识,用洞察力而非工程技巧破局。