一、芯片核心定位
SA8339 是一款全集成的 单通道 H 桥直流有刷电机驱动芯片 ,采用标准 SOP8 封装
其核心价值在于 高达 12.0A 的峰值驱动能力、极低的 H 桥导通电阻(典型 0.11Ω)以及完备的集成保护功能
专为 由多节电池或 12V 适配器供电、需要对直流电机进行高效正反转、调速及刹车控制的消费电子、机器人及工业设备设计
二、关键电气参数详解
电源与电压特性
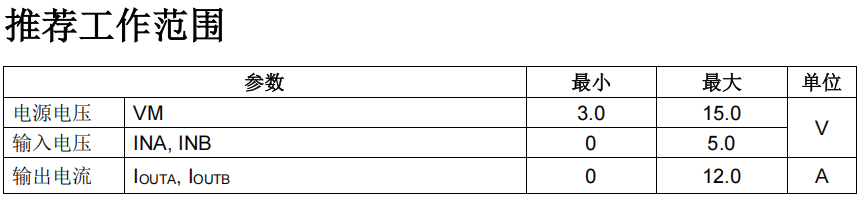
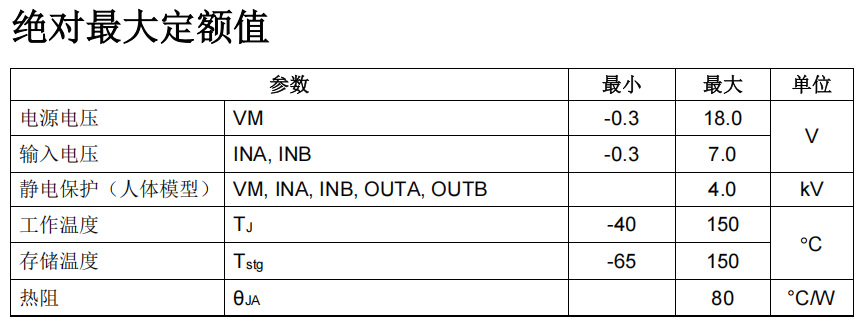
- 电源电压(VM)范围 3.0V 至 15.0V(推荐工作),绝对最大值 18.0V
- 集成欠压保护,确保在电压过低时系统可靠关断
- 逻辑输入电压(INA, INB)范围 0V 至 5.0V(推荐),最大值 7.0V,兼容 3.3V/5V 逻辑
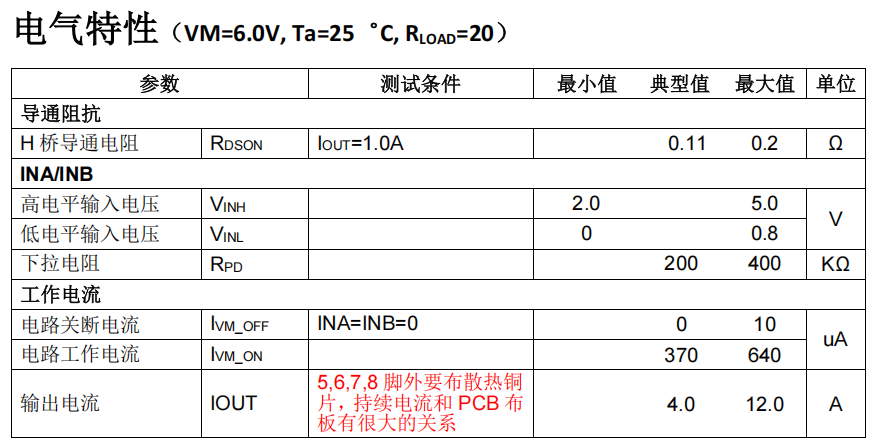
输入高电平阈值(VINH) 最小 2.0V
输入低电平阈值(VINL) 最大 0.8V - 内置下拉电阻(RPD) 典型 200kΩ(范围 200-400kΩ),确保输入悬空时电机处于待机高阻状态
电流与导通特性
- 峰值输出电流(IOUT) 12.0A(瞬间)
- 持续输出电流(IOUT) 4.0A(受散热条件严格限制)
- H 桥导通电阻(RDS(ON)) 典型 0.11Ω,最大值 0.2Ω(IOUT=1.0A, VM=6V 条件下测试)
极低的导通电阻是实现高效率、低发热的关键
功耗特性
- 待机电流(IVM_OFF) 最大值 10μA(INA=INB=0),典型仅 0.1μA,非常适合电池供电的常开设备
- 工作电流(IVM_ON) 典型 370μA,最大值 640μA
开关与保护特性
- 内置死区时间 典型 300ns,有效防止上下管直通(共态导通)
- 过流保护(OCP) 集成,当电流超过限定值时关断 MOSFET,电流下降后自动恢复

输出短路保护 集成
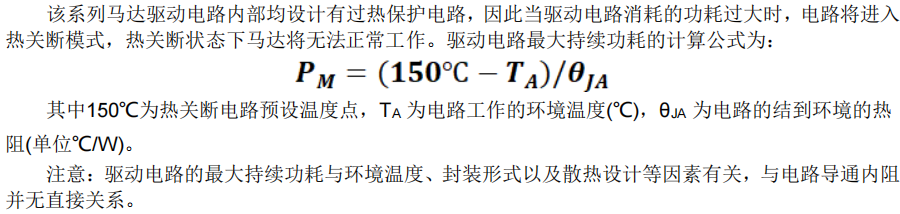
- 过温保护(TSD) 关断点典型 150°C,恢复点典型 110°C(迟滞 40°C)
- 热阻(θJA) 80°C/W,散热性能在 SOP8 封装中属于较好水平
三、芯片架构与特性优势
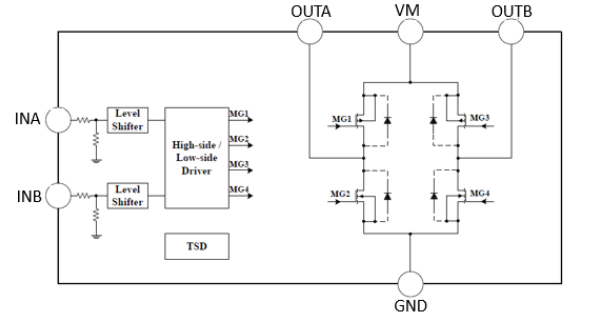
全集成功率 H 桥
- 在 SOP8 封装内集成了四个功率 MOSFET(两个 P 沟道上管,两个 N沟道下管)及其栅极驱动、逻辑控制和保护电路,实现了极高的集成度
- 引脚 5、6 并联为 OUTB,引脚 7、8 并联为 OUTA,以降低寄生电阻和电感,提升电流能力
智能 PWM 控制模式(关键特色)
提供两种截然不同的 PWM 调速模式,满足不同控制需求:
-
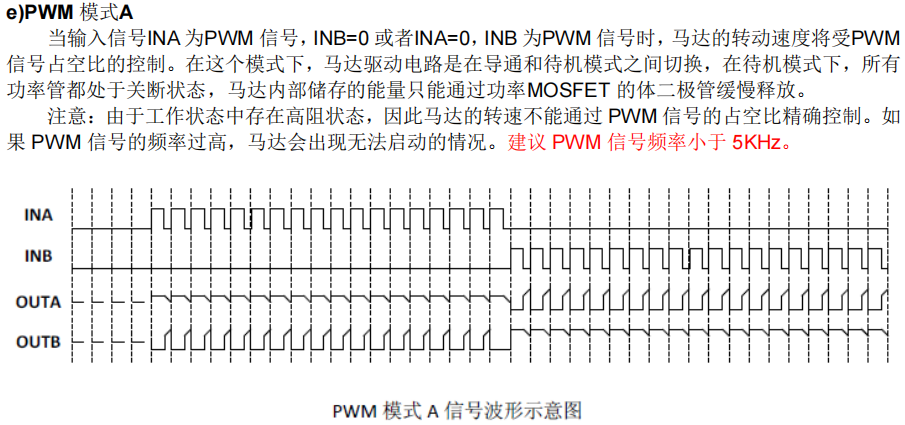
PWM 模式 A(缓衰减模式)
控制逻辑: INA 为 PWM, INB=0 (或反之)
工作状态循环: 驱动 ↔ 高阻(待机)
特点: 电机电流通过体二极管缓慢衰减,轻载效率可能更高,但转速控制不线性,且 PWM 频率不能过高(建议 <5kHz),否则可能导致电机启动困难
-
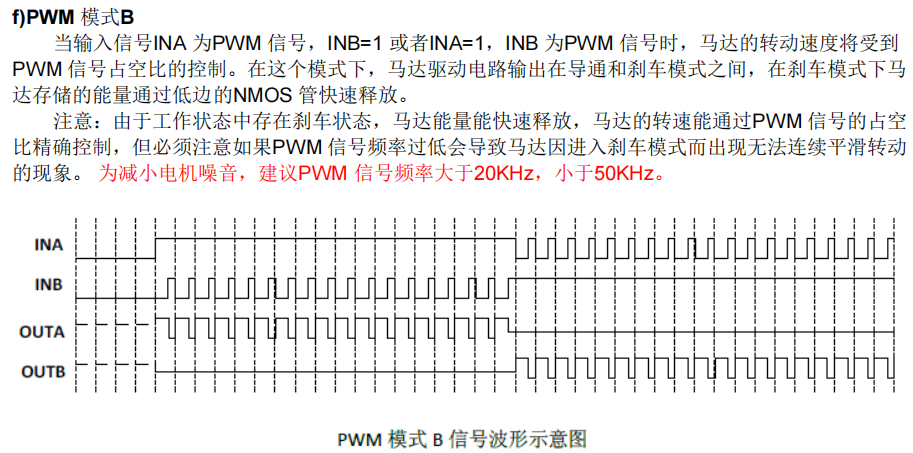
PWM 模式 B(快衰减/刹车模式)
控制逻辑: INA 为 PWM, INB=1 (或反之)
工作状态循环: 驱动 ↔ 刹车
特点: 电机电流通过低边 NMOS 快速衰减,转速可通过 PWM 占空比精确控制,动态响应好。建议 PWM 频率 >20kHz 且 <50kHz 以降低噪声并避免因频繁刹车导致的转动不平滑
完备的保护机制
- 集成了欠压保护、过流保护、短路保护和带迟滞的过温保护,形成了全面的故障防护网,显著提升系统可靠性
四、应用设计要点
电源去耦与滤波(至关重要)
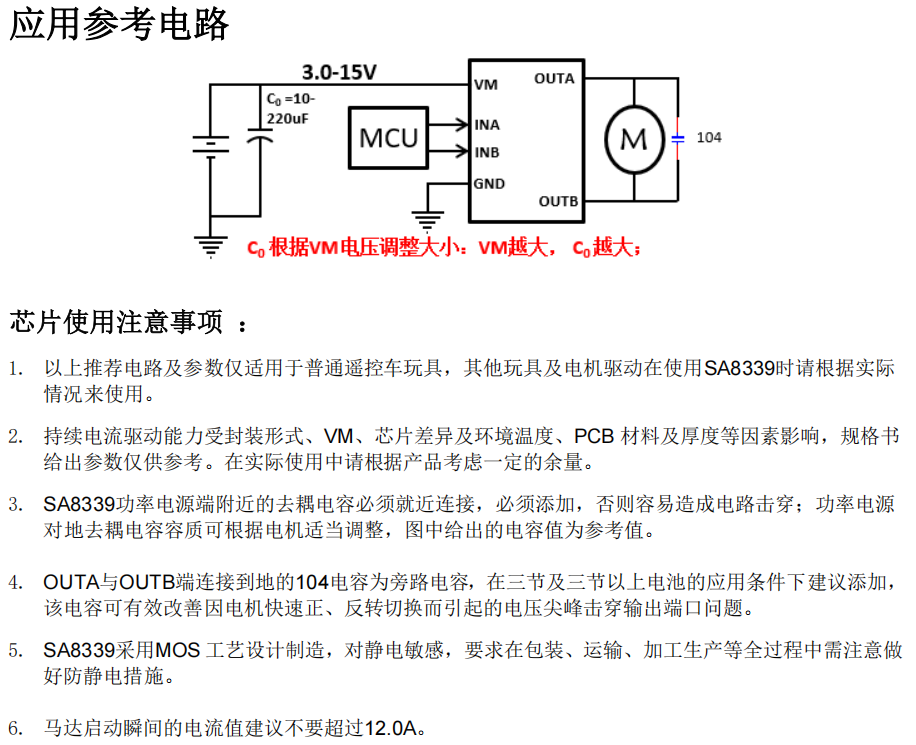
- VM 引脚必须就近连接一个 ≥10μF 的电解或固态电容作为 bulk 电容,并并联一个 0.1μF 陶瓷电容用于高频去耦
- 未正确放置去耦电容极易导致芯片因电压尖峰而击穿
输出端旁路电容
- 在 OUTA 和 OUTB 对地各连接一个0.1μF(104)陶瓷电容,可有效抑制电机快速正反转时产生的电压尖峰,保护芯片输出端口。在使用三节及以上电池(≥4.5V)时强烈建议添加
PWM 模式选择与频率设置
- 需要精确调速和快速响应: 选择 PWM 模式 B,并将频率设置在 20kHz-50kHz 之间(如 25kHz)
- 对效率极端敏感、且对调速线性度要求不高: 可考虑 PWM 模式 A,并使用低频 PWM(如 1-5kHz)
散热设计(决定持续带载能力)
-
功耗计算: 主要损耗为导通损耗 PD = IOUT² × RDS(ON)_TOTAL。例如,在 4A 持续电流下,损耗约为 4² ×0.11Ω × 2 ≈ 3.52W(考虑上下管各一个导通)

-
温升评估: 芯片热阻 θJA=80°C/W。在 3.52W 损耗、环境温度 TA=25°C 时,结温温升 ΔT ≈ 3.52 × 80 ≈282°C,远超过关断点(150°C)。这表明 4A 电流仅在极佳的散热条件下(如加装散热片、极好 PCB 导热)或间歇工作时才可能实现。
-
持续电流能力公式: IL = √(150 - TA) / (θJA × RDS(ON)_TOTAL),必须根据实际散热条件重新评估。
PCB 布局准则
- 功率回路最小化: VM → 芯片 → OUTx → 电机 → GND 的环路面积应尽可能小
- 大面积铺铜与过孔: 芯片底部及周围应使用大面积铜皮连接至 GND,并使用多个过孔阵列连接到 PCB 内层或底层地平面以增强散热
- 信号地隔离: 逻辑控制信号的地应与功率地单点连接,避免开关噪声干扰控制电路
五、典型应用场景
机器人关节与轮子驱动
- 为扫地机器人、教育机器人、玩具机器人提供紧凑、高效的轮子或关节电机驱动方案
智能门锁与电动门窗
- 驱动锁舌的直流电机,其待机电流极低,集成保护功能可靠
数码产品与智能玩具
- 驱动摄像机云台、遥控车、模型飞机的直流电机
工业自动化小型执行机构
- 用于小型传送带、阀门、挡板等设备的直流电机驱动
六、调试与常见问题
芯片频繁进入过温保护(TSD)
- 检查实际负载电流: 是否持续接近或超过 4A?测量电机工作电流
- 评估散热: PCB 散热铜箔面积是否足够?是否添加了散热过孔?环境是否密闭高温?
- 考虑降额使用: 根据散热条件降低持续工作电流预期
PWM 调速异常(电机抖动、异响或无法启动)
-
确认 PWM 模式: 检查是否错误混用了模式 A 和模式 B 的逻辑条件
-
调整 PWM 频率: 模式 A 使用过低频率(如 100Hz),模式 B 使用过高频率(如100kHz)都可能导致问题。严格按照建议范围设置。
-
检查电源: PWM 开关时 VM 电压是否出现大幅跌落?加大 bulk 电容容值。
电机启动瞬间芯片保护或重启
- 抑制启动电流: 直流电机启动电流可达稳态数倍,可能触发过流保护。可通过软启动(逐渐增大 PWM 占空比)或降低启动电压来缓解。
- 检查输出电容: 确保 OUTA/OUTB 的旁路电容(0.1μF)已安装,特别是在高压应用中。
逻辑控制不响应
- 检查输入电平: 确保 INA/INB 的高电平 >2.0V(最好 >2.5V),低电平 <0.8V。对于 3.3V 系统需确认电平裕量。
- 测量静态电流: 在待机模式(INA=INB=0)下,VM 电流应 <10μA,否则可能存在短路或漏电。
七、总结
SA8339 通过在 SOP8 封装内集成 极低导通电阻的 H 桥、完整的保护电路 及 灵活的双模式 PWM 控制 ,为 12V 系统的直流电机驱动提供了一个高集成度、高可靠性 的单芯片解决方案
其 12A 峰值电流能力 可应对电机启动等瞬态大电流场景,而成功应用于持续工作场景的关键在于 基于热阻公式的严谨散热设计 与 根据控制需求对 PWM 模式的正确选择
设计者需特别注意 电源与输出端的电容配置以抑制电压尖峰,并深刻理解两种 PWM 模式在衰减机制和控制特性上的根本差异
在消费电子、机器人及各类自动化设备中,SA8339 是实现紧凑、可靠、高效直流电机控制的优秀选择
文档出处
本文基于 SA8339 芯片数据手册 Version 1.1 整理编写,结合直流电机驱动设计实践
具体设计与应用请以官方最新数据手册为准,在实际应用中务必重点验证热性能、PWM 控制效果及保护功能响应