**目的:**评估RCWL-1640超声测距模块的测量精度。
**结论:**该模块的测量精度误差为±10mm。
实验环境搭建:
主要物料准备:STM32电机控制板、步进电机滑台、RCWL-1640模块。数据采集通过CAN传输到PC。
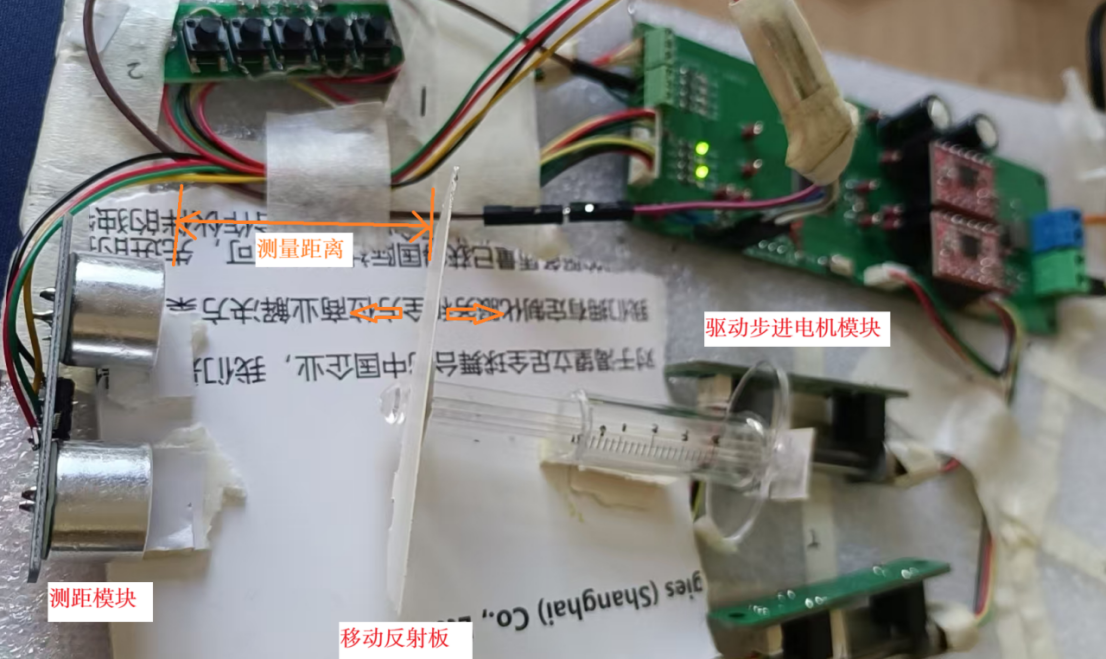
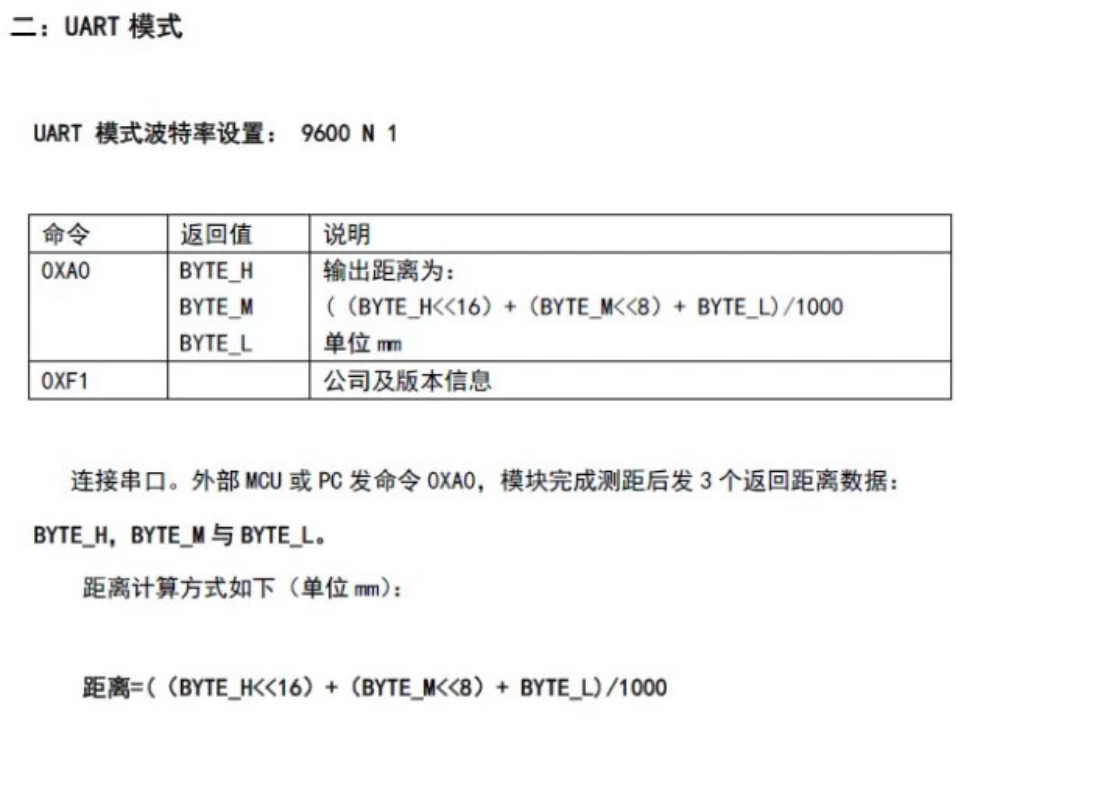
RCWL-1640模块的采用UART模式。
微型2相4线10mm步进电机,丝杆滑台。

采用步进电机移动反射面,电机的步进角18°,丝杆的螺距0.4mm,步进的移动精度是0.02mm。1mm=50脉冲。
使用CAN接口传输数据到PC,进行数据的采集。
操作方式:
- 超声模块位置固定;
- 电机驱动滑轨,从而移动反射板,改变测量物体的距离;
- 每隔1秒移动一次,移动距离为1mm(50个步进脉冲),测量一次距离,并记录。

实验数据分析:
-
去除初始和结束位置的值,实际距离从65-50mm范围,脉冲位置为42-792,使用了750脉冲,每mm为50脉冲,换算为距离是15mm(=750/50),距离和脉冲符合预期。
-
测量的重复性稳定性不够,无法通过离散校正的办法提高测量的精度到mm,超声测距模块的测量精度只能达到±1.0cm。
-
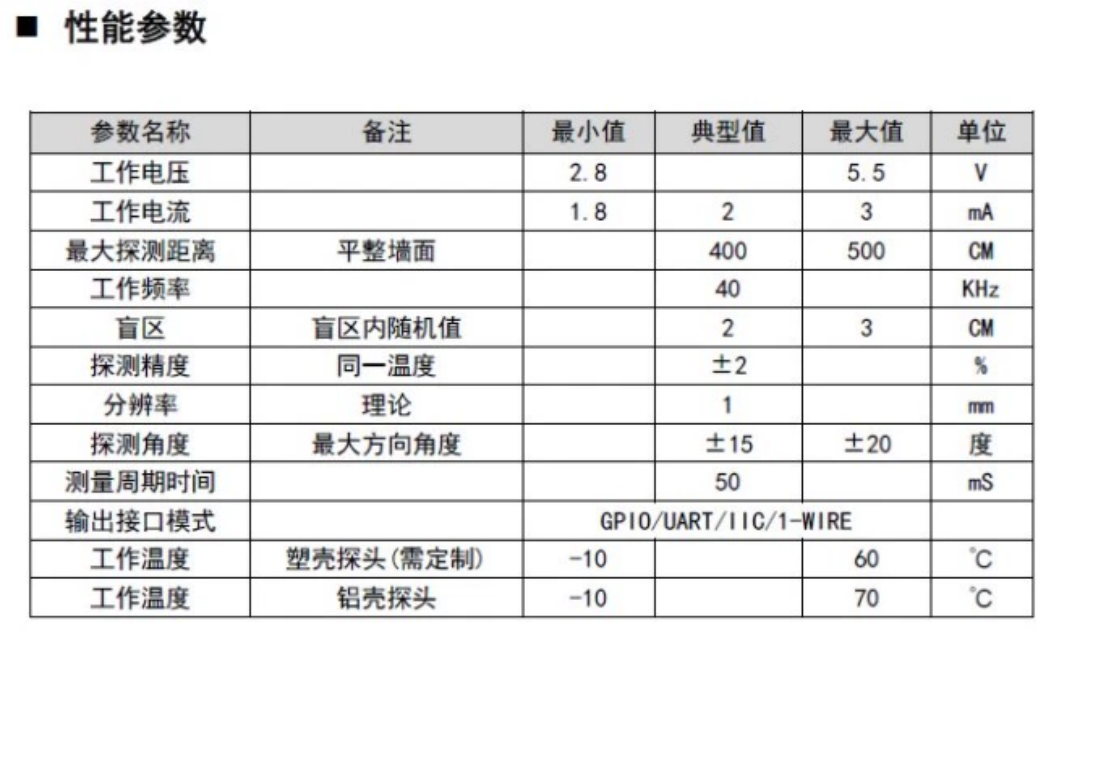
RCWL-1640模块的datasheet 中分辨率为mm,误导使用者。
**后续思考:**RCWL-1640模块的重复性还可以,如果进行大量数据的采集和校准,也许可以提高测量的精度。