1、fast_lio2建图与重定位
整体安装和使用流程可以参考另一篇文章fast_lio2建图与重定位
 这里我先给他下采样一下,把点从950w减少到18w,
这里我先给他下采样一下,把点从950w减少到18w,
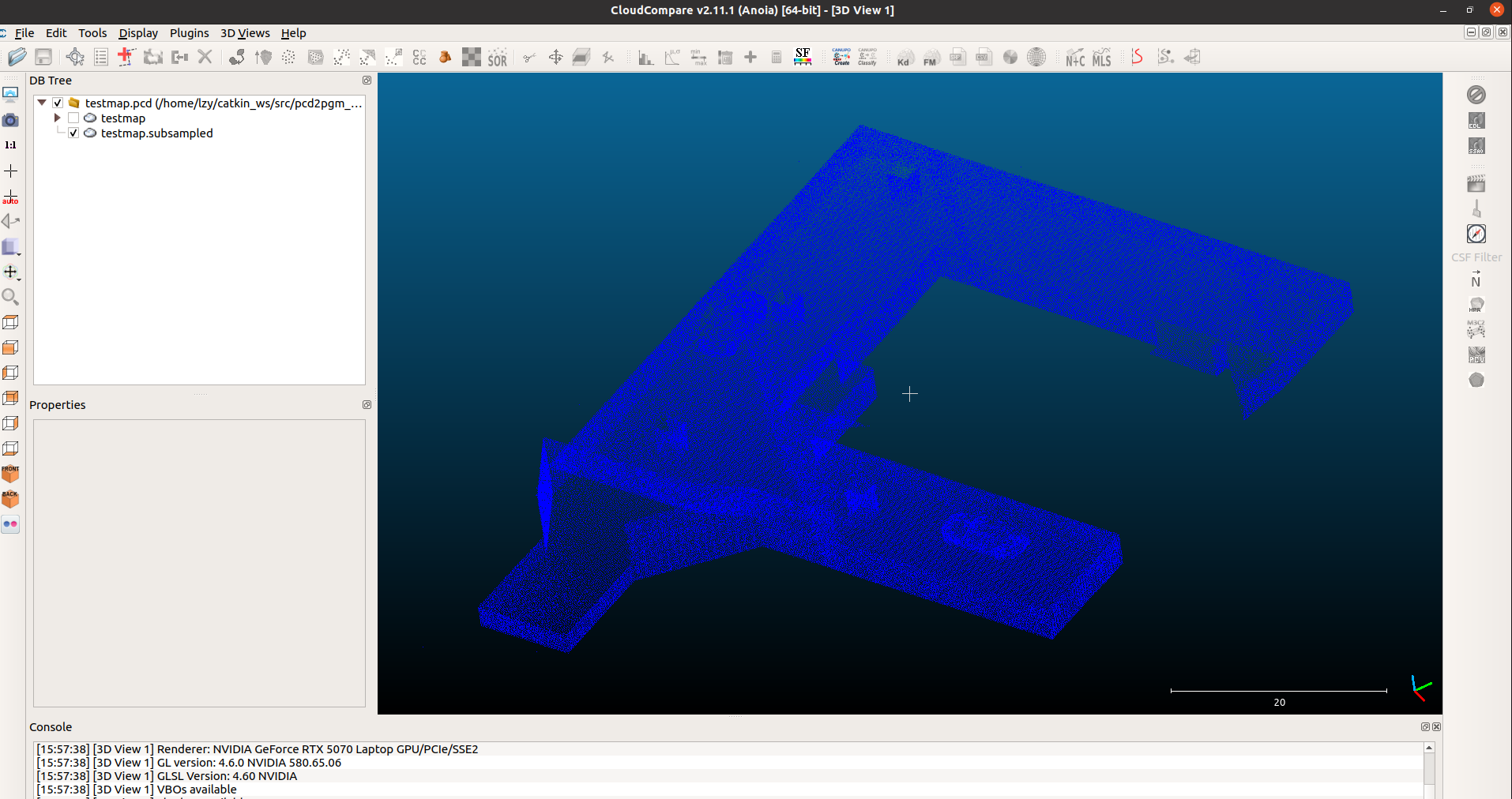 但使用cloudcompare下采样后保存的地图会导致fast_lio_localization读取点云出错:
但使用cloudcompare下采样后保存的地图会导致fast_lio_localization读取点云出错:
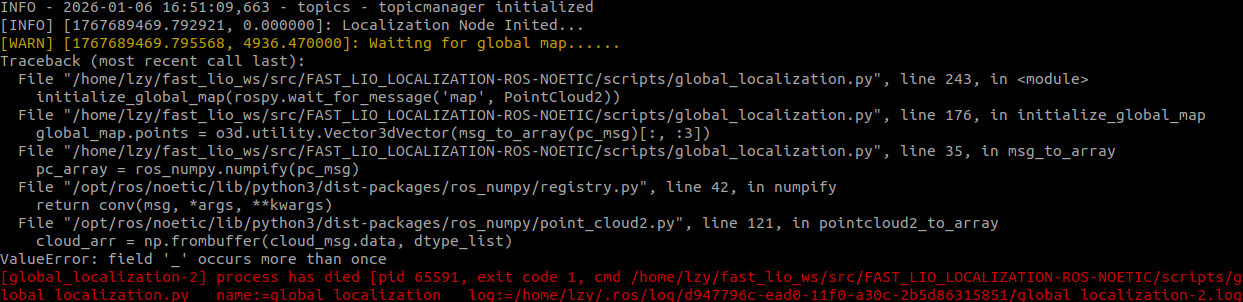 因此需要对fast_lio_localization的源码scripts/global_localization.py
因此需要对fast_lio_localization的源码scripts/global_localization.py
中的msg_to_array函数进行简单修改:
python
def msg_to_array(pc_msg):
try:
pc_array = ros_numpy.numpify(pc_msg)
pc = np.zeros([len(pc_array), 3])
pc[:, 0] = pc_array['x']
pc[:, 1] = pc_array['y']
pc[:, 2] = pc_array['z']
return pc
except Exception as e:
# 如果ros_numpy失败,改用point_cloud2
import sensor_msgs.point_cloud2 as pc2
points = list(pc2.read_points(pc_msg, field_names=("x", "y", "z"), skip_nans=True))
return np.array(points)接下来重定位就没有问题了
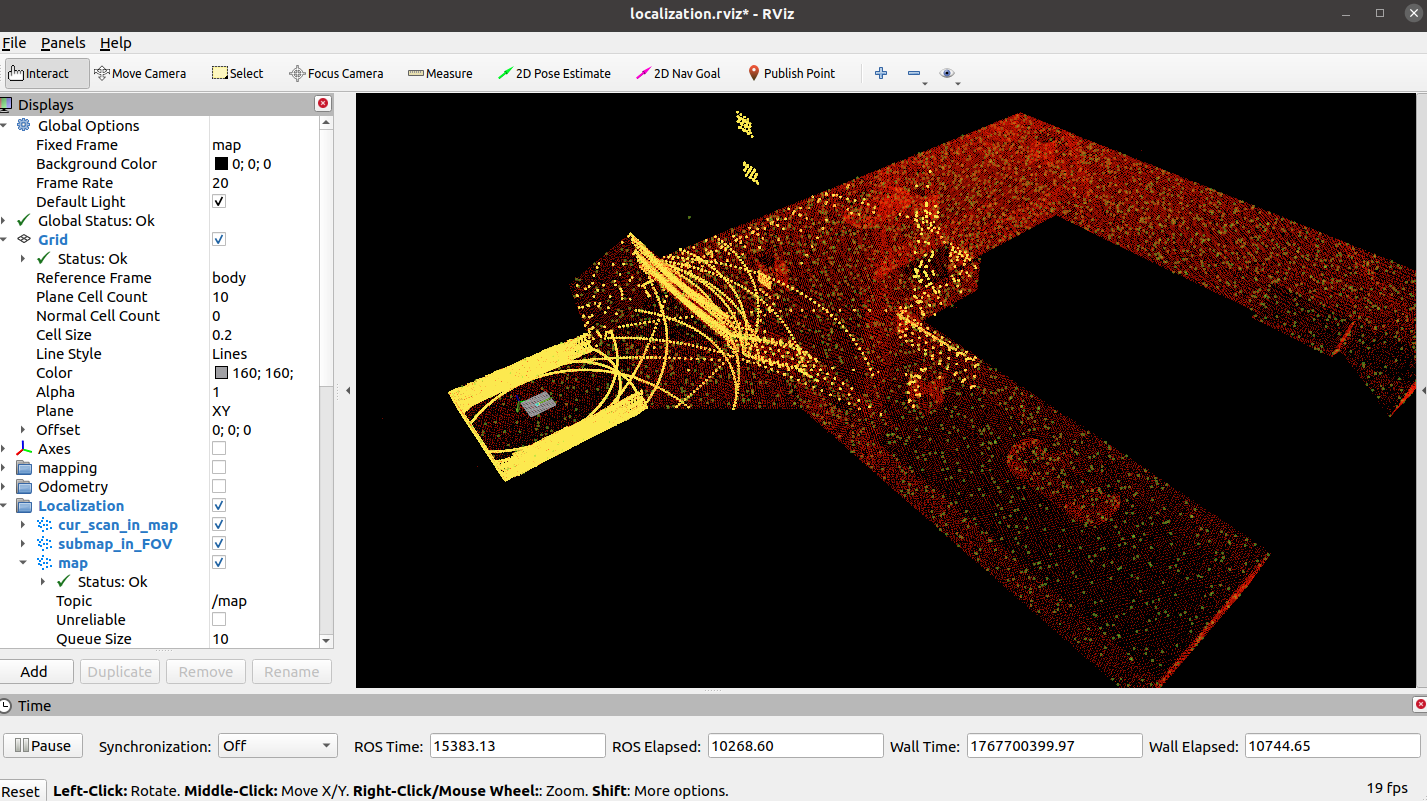
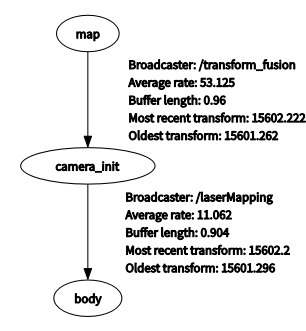
这里map和camera_Init之间的转换关系是由点云和地图匹配确定(可以和i理解为运行重定位时机器人的位置在map中的位姿),camera_Init和body之间是激光雷达里程计
这里还有个/Odometry话题,反映的是雷达里程计(camera_Init->body),而非机器人在map中的位姿。
2、将地图转换为move_base的2D栅格地图
将PCD点云转换成pgm格式的2D栅格地图
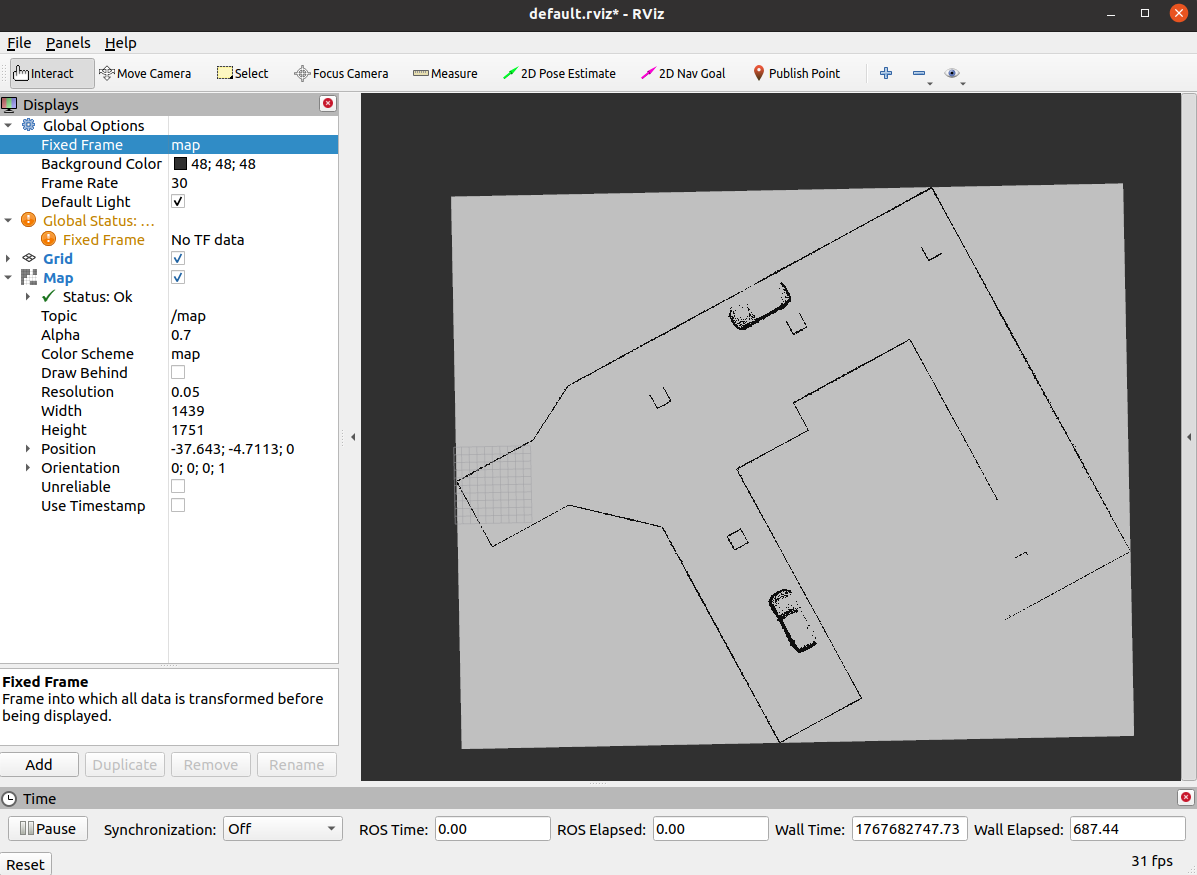 保存地图到本地
保存地图到本地
bash
rosrun map_server map_saver map:=/map -f mymap
3、将Mid360实时发布的3D点云转换成2D点
这里我用的是ROS1
bash
git clone -b lunar-devel https://github.com/ros-perception/pointcloud_to_laserscan.git直接编译后完成