下图概括了这条从理论到实战的学习路线,你可以先有个整体概念: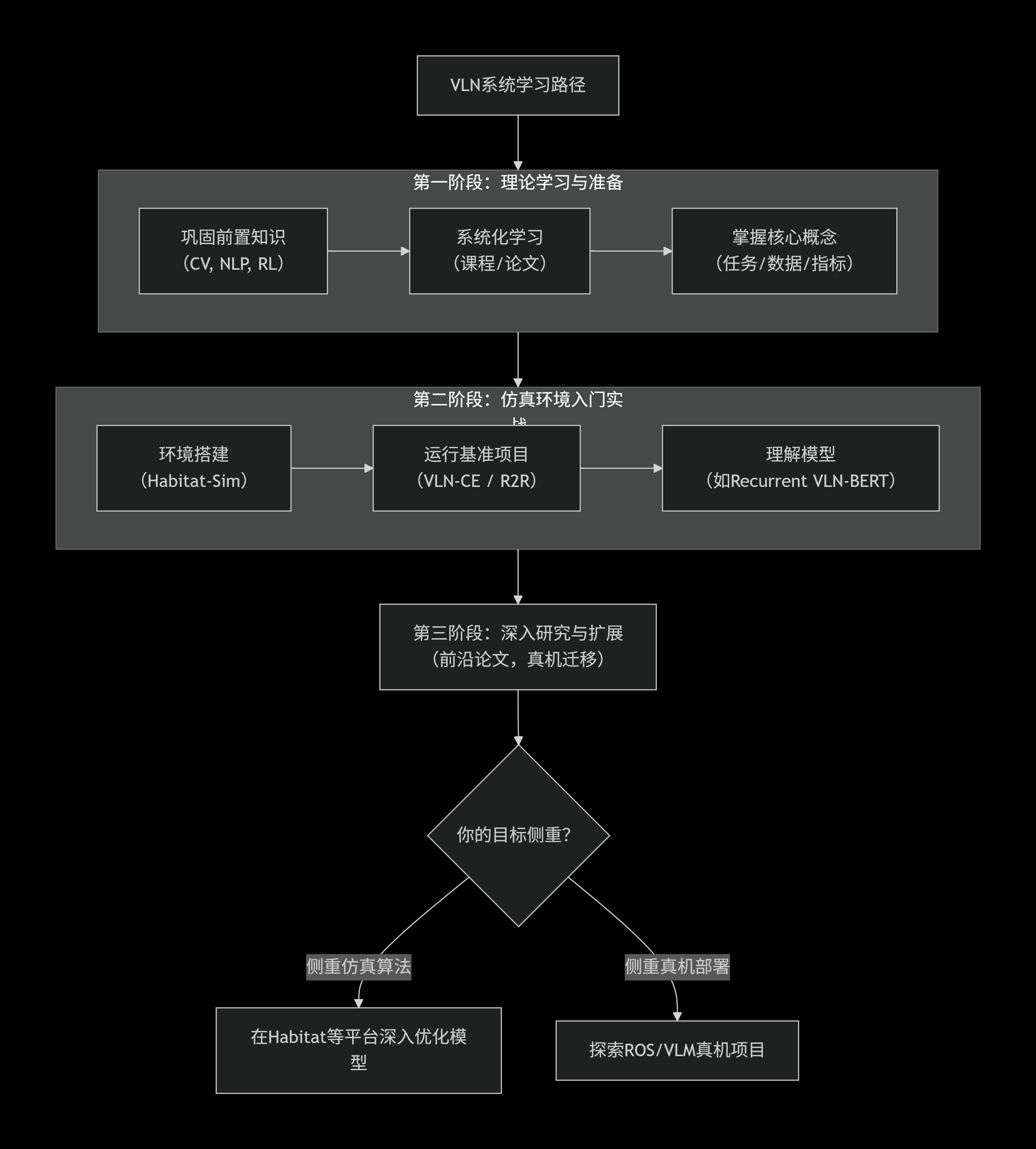
第一阶段:理论准备与入门
这个阶段的目标是建立系统的知识框架。
-
巩固前置知识:确保对**计算机视觉(CNN、ViT)、自然语言处理(LSTM、Transformer、BERT)和强化学习/模仿学习有基本了解。
-
系统化学习课程:可以学习系统化的线上课程。例如,深蓝学院的《视觉语言导航VLN:理论与实践》课程就涵盖了从概论、数据集、核心模型到与大模型融合的完整知识体系。山东大学等高校也曾开设相关暑期课程。
-
研读经典与前沿论文:
- 经典奠基: 从R2R数据集和基于Matterport3D Simulator的早期方法入手。
- **当前主流:**重点学习在连续环境(VLN-CE)使用Habitat平台的方法。
- 前沿趋势: 关注大模型与VLM如何赋能VLN,例如 NaVid 项目展示了仅用单目视频和VLM实现SOTA性能的思路,`ClipRover`也探索了零样本导航。
第二阶段:动手实践(仿真环境)
这是搭建系统的核心环节,建议从成熟的基准项目开始。
- 搭建开发环境:
- 操作系统:推荐使用 Ubuntu。
- 核心平台:安装 Habitat-Sim仿真器,这是目前连续空间VLN研究的基础平台。
- 创建独立的Python环境(如使用conda),以避免依赖冲突。
2. 运行第一个基准项目:
- 项目推荐 :VLN-CE是R2R任务在连续环境下的标准实现,基于Habitat,社区资源丰富,非常适合起步。
- 数据准备: 需要下载**Matterport3D (MP3D)**场景数据集。注意,该数据集规模较大(完整版约1.3TB),需按要求申请下载。
- **快速上手:**按照教程克隆项目、安装依赖、下载数据并运行评测脚本,先直观感受整个流程。
3. 深入理解与复现经典模型:
- 模型推荐: 尝试复现 Recurrent VLN-BERT等经典模型。它结合了循环记忆与VLN-BERT预训练,是理解跨模态融合的很好范例。
- 动手方法 :仔细阅读其论文和代码仓库,重点理解其数据预处理、模型架构和训练流程。可以参考社区详细的复现教程。
第三阶段:深入研究与扩展
在掌握基础后,你可以根据兴趣选择方向深入。
- 向真实机器人迁移 :这是最大挑战。可以关注 Robo-VLN `等项目,它专注于连续控制与真实世界转移。最新的 NaVid 项目提供了仅依赖单目RGB视频的VLM方案,为消除Sim2Real(仿真到现实)差距提供了新思路。
- 探索新范式: 关注大语言模型(LLM)作为导航大脑的框架(如 NavGPT),或 Air VLN(无人机视觉语言导航)等新兴领域。
- **真机部署体验:**如果条件允许,可以参加线下实训营(例如基于宇树G1等机器人平台),在真机上实战部署VLN pipeline,解决实际问题。
核心工具与资源总结
核心工具、数据和项目整理如下:
| 类别 | 推荐项目/工具 | 核心特点与用途 |
|---|---|---|
| 仿真平台 | Habitat / Habitat-Sim | 当前主流,支持连续空间、物理约束,贴近真实机器人。 |
| Matterport3D Simulator | 经典离散环境仿真器,适合学习早期VLN算法。 | |
| 核心数据集 | R2R (Room-to-Room) | 基准数据集,基于Matterport3D,含自然语言指令与路径。 |
| VLN-CE | R2R的连续环境扩展,用于训练和评估更真实的导航。 | |
| REVERIE | 在导航基础上增加了目标物体定位任务。 | |
| 实践项目 | VLN-CE 项目 | 最佳入门项目,基于Habitat,提供完整训练评估流程。 |
| Recurrent VLN-BERT | 经典模型,适合深入理解跨模态融合与预训练。 | |
| Robo-VLN | 侧重于机器人连续控制 与向真实世界迁移。 | |
| NaVid | 前沿VLM方案 ,仅用RGB视频,研究Sim2Real迁移。 |
下一步建议
学习的核心是 动手-思考-再动手 。你可以:
-
明确起点:根据你的现有基础,从第一阶段或直接从第二阶段开始。
-
从小目标开始:不要试图一开始就理解所有代码。目标可以是成功运行VLN-CE的评测脚本,并看到SPL和成功率结果 。
-
保持追踪:关注 CVPR、ICCV、ECCV*等顶级会议的VLN相关论文,以及 GitHub*上的热门项目。