

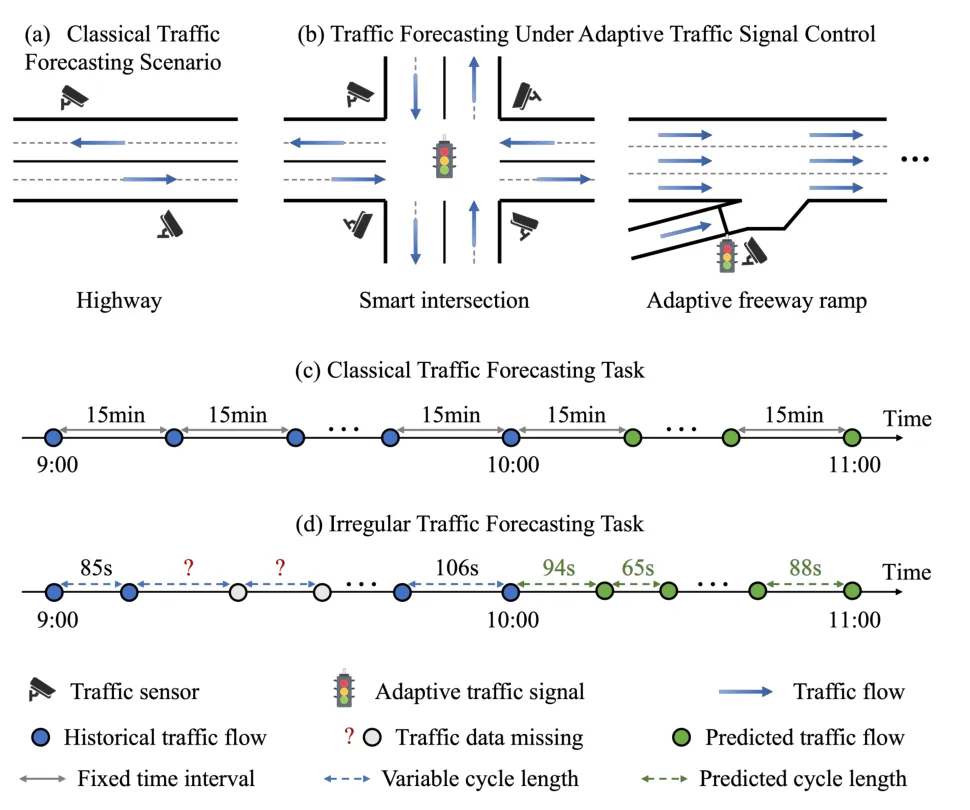
随着智能交通系统(ITS)的快速发展,精准的交通预测已成为现代城市交通管理的核心支撑技术,在应急响应、自动驾驶、交通信号优化等领域发挥着关键作用。交通预测的核心目标是基于历史交通数据,提前预判未来一段时间内的交通状态(如车流量、信号周期等),为交通管理部门和出行者提供决策依据。传统交通预测方法通常假设交通数据是按固定时间间隔采集的规则时间序列,然而在实际城市交通场景中,交通信号灯会在一天内发生多次调整 ------ 不同传感器的采集时间错位、时间间隔波动、预测序列长度不固定等问题,这使得传统方法预测精度大幅下降。
针对这个问题,香港科技大学(广州)、百度、亚利桑那州立大学等机构的学者联合完成了一项研究,论文发表于第 30 届 ACM SIGKDD 国际数据挖掘与知识发现大会,是不规则交通预测领域的突破性研究成果。

PART 1 聚焦新问题:明确不规则交通预测核心挑战
针对自适应交通信号控制下交通数据的不规则性,首次系统定义了不规则交通时间序列预测任务,精准指出异步空间依赖、不规则时间依赖、变长序列预测三大核心难题,填补了传统方法在该实际场景的应用空白。
PART 2 创新架构:三级模块针对性破解技术瓶颈
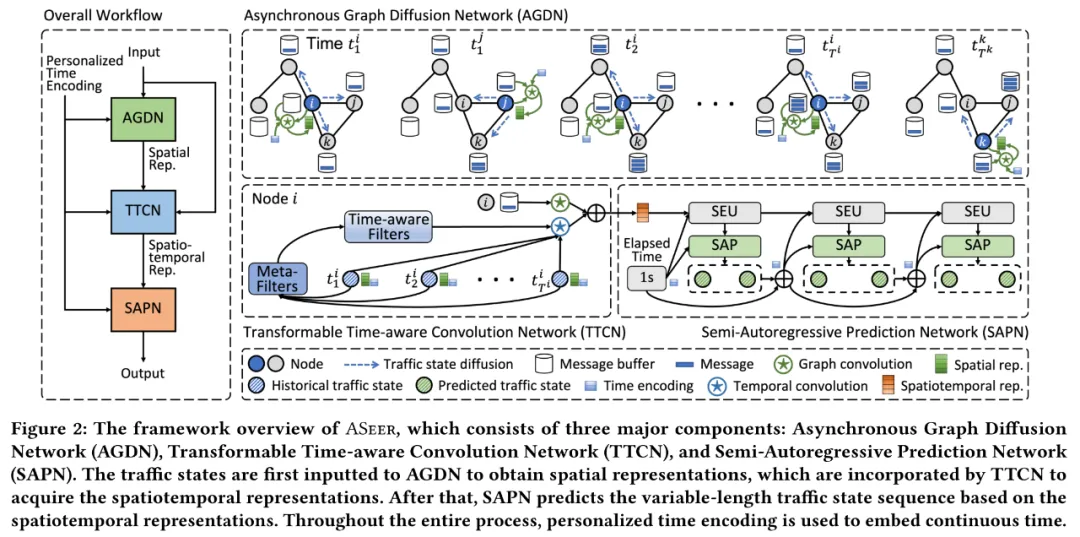
设计异步时空图卷积网络(ASeer),通过三大核心模块协同工作:异步图扩散网络(AGDN)建模异步空间依赖,搭配个性化时间编码的可变换时间感知卷积网络(TTCN)捕捉不规则时间依赖,半自回归预测网络(SAPN)实现变长序列高效低误差预测,形成端到端解决方案。
PART 3 构建基准:提供数据集与验证体系
创建首个不规则交通预测基准数据集(株洲、保定真实交通数据),设计六项全面评价指标,经实验验证,模型性能显著优于 12 种主流基线方法,为该领域提供了统一的实验对比基础和最优参考方案。

论文提出了异步时空图卷积网络(Asynchronous Spatio-tEmporal graph convolutional nEtwoRk )的概念,缩写为ASEER,"A" 对应 "Asynchronous"(异步),突出模型针对 "异步空间依赖" 的核心设计;"Spatio-tEmporal"(时空)和 "graph convolutional nEtwoRk"(图卷积网络)是模型的技术基底,分别对应交通数据的空间关联与时间动态建模需求。ASeer 的核心设计思路是针对不规则交通数据的三大挑战,构建 "异步空间依赖建模 - 不规则时间依赖捕捉 - 变长序列预测" 的三级架构,整体框架如下图所示。
PART 1 异步图扩散网络(AGDN):解决空间依赖异步性
为建模不同传感器异步数据的空间依赖关系,AGDN 通过交通扩散图连接传感器节点,并设计异步扩散与整合机制:
1.扩散图构建:以交通传感器为节点,基于地理距离(阈值设为 1km)和道路可达性构建边,形成交通扩散图,节点特征为历史交通状态(信号周期长度、车流量),边特征包含地理距离和可达性信息。
2.异步扩散与存储:当某个传感器采集到交通状态数据时,会将该数据作为消息异步扩散至相邻节点,相邻节点将接收的消息存储在消息缓冲区中,避免同步等待导致的信息丢失。
3.异步图卷积:当节点自身采集到新数据时,触发异步卷积操作 ------ 通过注意力机制计算缓冲区中相邻节点消息的权重,结合时间差编码和边特征,整合得到该节点的空间特征表示。缓冲区在每次卷积后清空,确保每条消息仅被使用一次,避免冗余计算。
AGDN 的创新之处在于打破了传统图神经网络的同步计算限制,允许节点异步交互数据,有效处理了传感器数据时间错位带来的空间依赖建模难题。
PART 2 可变换时间感知卷积网络(TTCN):捕捉不规则时间依赖
为适应不规则时间序列的动态特性,TTCN 通过个性化时间编码和可变换滤波器,实现高效的时间依赖捕捉:
1.个性化时间编码(PTE):针对不同传感器的信号周期特性,设计可学习的三角函数编码,将连续时间间隔转化为包含周期模式的向量。同时引入全局通用时间编码,通过自适应权重融合个性化编码和通用编码,解决部分传感器数据稀疏导致的编码学习不充分问题。
2.可变换时间感知卷积:通过元滤波器(Meta-Filters)动态生成适配序列长度的时间感知滤波器,元滤波器的参数与序列长度无关,可根据输入序列的时间间隔分布调整滤波器大小和参数,实现对不规则序列的高效卷积。相比传统 CNN,TTCN 无需对序列进行填充或截断,避免了信息丢失,同时支持任意长度的长时依赖建模。
TTCN 将空间特征、交通状态数据和时间编码拼接后,通过动态生成的滤波器进行时间卷积,输出融合时空信息的节点特征表示。
PART 3 半自回归预测网络(SAPN):实现变长序列高效预测
为解决变长序列预测的误差累积和效率问题,SAPN 采用 "迭代预测子序列" 的半自回归机制:
1.状态演化单元(SEU):以 TTCN 输出的时空特征为初始隐藏状态,根据预测的时间流逝动态更新隐藏状态,模拟交通状态随时间的演化过程。
2.半自回归预测器(SAP):在每个预测步骤中,基于演化后的隐藏状态、初始时空特征和时间编码,预测一段固定长度的子序列,而非单一步骤。预测的子序列长度可根据实际需求动态调整,通过迭代预测直至覆盖未来目标时间窗口(如 1 小时)。
3.误差控制:相比全自回归模型,SAPN 大幅减少了预测步骤,降低了误差累积;相比非自回归模型,其迭代机制保留了序列的时序关联性,提升了长序列预测精度。
PART4 模型训练损失函数
为应对数据缺失问题,模型采用三种掩码损失函数联合优化:
1.周期长度损失:基于掩码平均绝对误差(MAE)优化信号周期长度预测

2.时间累积损失:优化由周期长度累积得到的时间戳预测精度,减少时间误差传播;

3.车流量损失:基于掩码 MAE 优化车流量预测,使用真实周期长度计算车流量以避免周期预测误差的干扰。

总损失函数为:

确保模型在周期长度和车流量预测上均达到高精度。

PART1 实验设计
研究团队采集了中国两个智能交通试点城市(株洲和保定)的真实交通数据,构建了首个不规则交通时间序列基准数据集,数据集包含交通信号周期长度、开始 / 结束时间戳、车道车流量等关键信息,真实反映了自适应交通信号控制下的不规则数据特性。
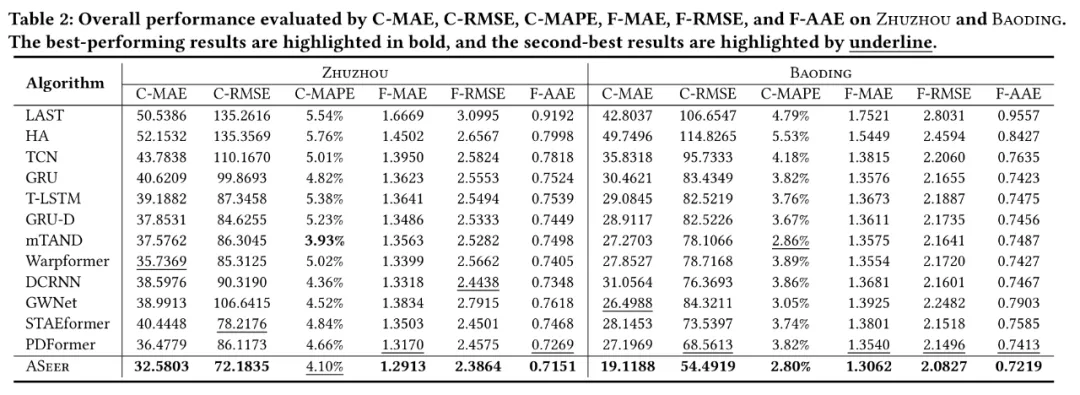
实验选取了 12 种主流方法作为对比,包括启发式方法(LAST、HA)、传统序列模型(TCN、GRU)、不规则时间序列模型(T-LSTM、GRU-D、mTAND、Warpformer)和经典交通预测模型(DCRNN、GWNet、STAEformer、PDFormer)。
在评价指标方面:设计 6 种指标全面评估预测性能,包括 3 种周期长度相关指标(C-MAE、C-RMSE、C-MAPE)和 3 种车流量相关指标(F-MAE、F-RMSE、F-AAE),所有指标均为越低越好。
PART2 实验结果
1.整体性能对比:
ASeer 在两个数据集的 6 项指标中均取得最优成绩(如表 1 所示)。例如,在株洲数据集上,C-MAE 达到 32.58,较最优基线模型 PDFormer(36.48)降低 10.7%;在保定数据集上,C-MAE 为 19.12,较最优基线模型 GWNet(26.50)降低 27.8%。这验证了 ASeer 在异步空间依赖、不规则时间依赖建模和变长序列预测上的优越性。
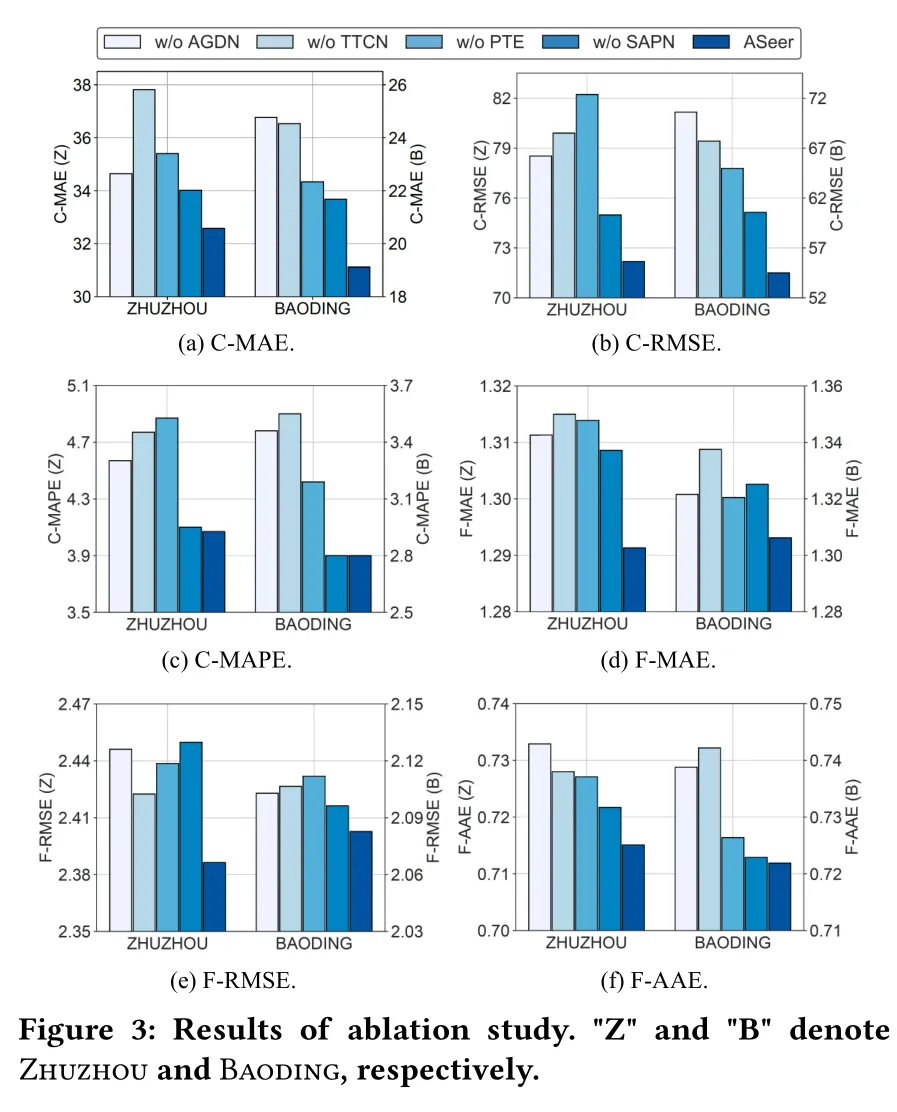
2.消融实验:
通过移除 AGDN、TTCN、PTE、SAPN 等核心模块,验证各组件的必要性:
* 移除 AGDN 后,车流量相关指标显著下降,说明异步空间建模对捕捉交通流空间关联至关重要;
* 移除 TTCN 后,所有指标均大幅恶化,验证了可变换时间感知卷积对不规则序列的适配能力;
* 移除 PTE 后,周期长度预测精度下降,说明个性化时间编码能有效捕捉传感器独特周期模式;
* 移除 SAPN 后,长序列预测误差累积明显,验证了半自回归机制的误差控制效果。
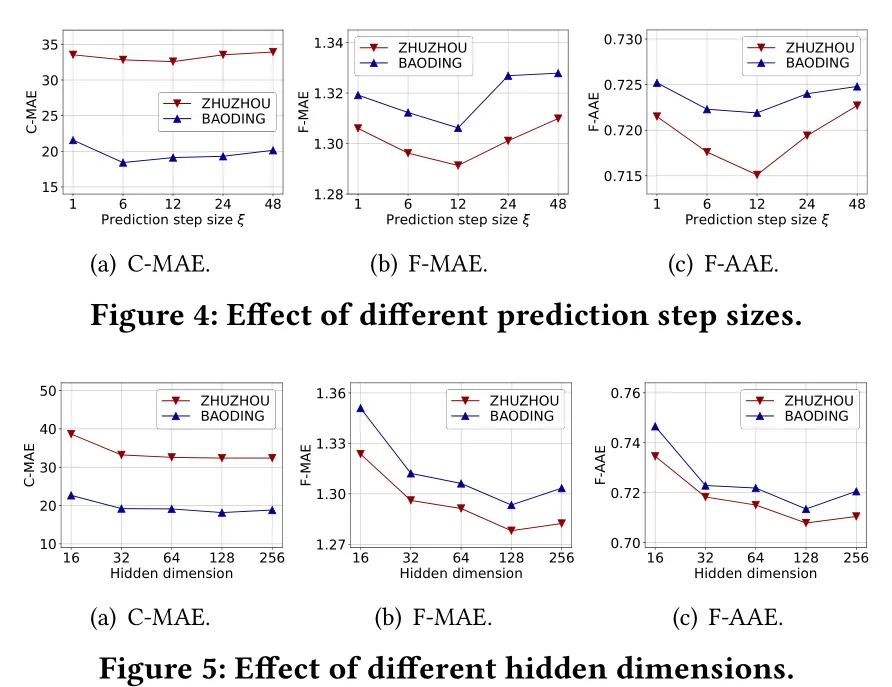
3.参数敏感性分析:
- 预测步长从 1(全自回归)增加到 12 时,模型性能持续提升,步长过大(如 48)会导致性能下降,最优步长为 12;
- 隐藏层维度:从 16 增加到 128 时,性能稳步提升,128 维时达到最优,进一步增加维度会导致计算成本激增而性能增益有限。
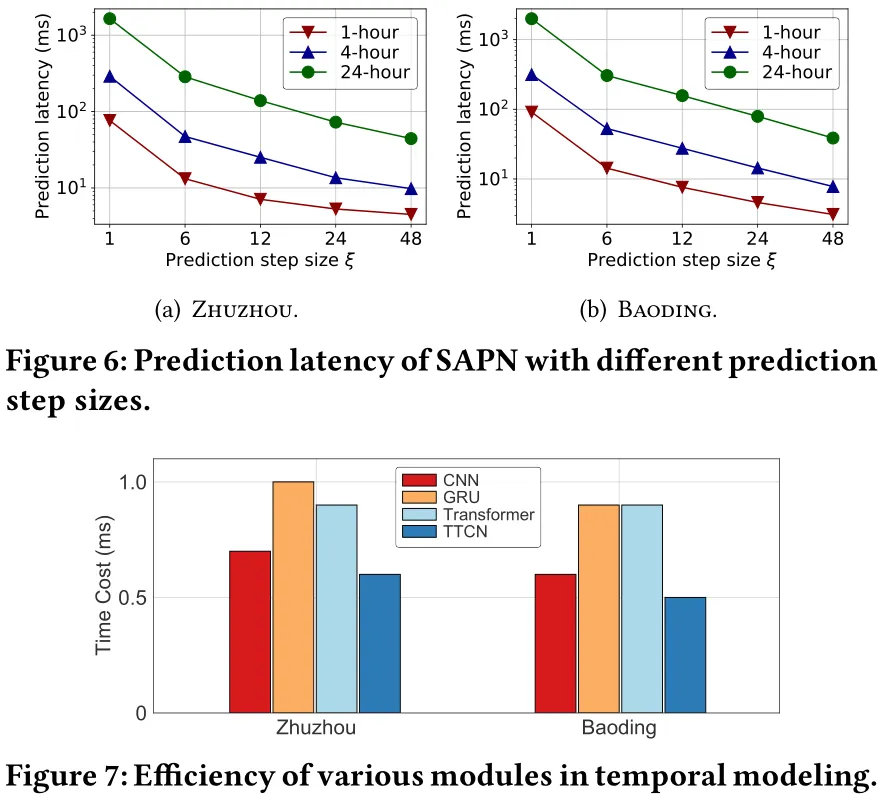
4.预测效率分析:
- SAPN 效率:相比全自回归模型,步长为12时预测 1 小时、4 小时、24 小时交通状态的 latency 分别降低约 90%、92%、95%,大幅提升预测效率;
- TTCN 效率:相比 GRU 和 Transformer,TTCN 的时间成本降低 40% 以上,甚至优于传统 CNN,因其无需序列填充 / 截断操作。

不规则交通时间序列预测是智能交通系统发展的关键技术瓶颈,传统方法难以应对异步空间依赖、不规则时间依赖和变长序列预测三大挑战。ASeer 网络通过创新的三级架构,实现了对不规则交通数据的精准建模:AGDN 解决了异步数据的空间依赖关联问题,TTCN 高效捕捉了不规则序列的时间动态特征,SAPN 实现了变长序列的低误差、高效率预测。大规模真实数据集上的实验证明,ASeer 在 6 项评价指标上均显著优于 12 种主流基线模型,同时具备高效的预测性能。
该研究不仅为不规则交通预测提供了首个基准数据集和最优解决方案,其提出的异步图扩散、个性化时间编码、半自回归预测等技术,为不规则时间序列分析提供了通用解决方案,具有广泛的跨领域应用前景。未来,随着多模态数据融合、动态图学习、轻量化部署等技术的进一步优化,ASeer 这类基于不规则采样的信号进行预测的算法有望在智能交通、自动驾驶、应急管理、甚至生物监测、自然灾害预报等领域实现规模化落地,为构建高效、安全、智能的现代化生活提供核心技术支撑。