为什么需要D-H参数法?
1. 核心问题:
机器人由多个连杆通过关节(转动或移动)串联而成。要描述末端执行器的tcp/空间中的一个点相对于基座的位置和姿态,需要知道所有相邻连杆之间的变换关系,并将这些变换串联起来,有了某个点相对于flange的pose,再有相邻关节之间的变换关系,即变换矩阵,才能将这个点的pose转换到基坐标系下。
关键挑战: 如何系统、标准、简洁地为每个连杆建立坐标系,并定义它们之间的变换?
2. 解决方案:D-H参数法
Denavit和Hartenberg于1955年提出了一种标准方法(D-H参数法)。
核心思想: 该方法仅通过四个参数 (a, α, d, θ),就能完全描述相邻两个连杆坐标系之间的相对位姿(包括平移和旋转)。
dh参数
DH参数法最早是Jacques Denavit与Richard Hartenberg在1955年提出的。
DH参数(Denavit-Hartenberg参数) 是描述机器人连杆之间几何关系 和运动关系 的一套标准化方法,用于建立机器人的运动学模型。它通过一套统一的规则,将复杂的机器人结构转化为数学模型,是机器人运动学分析的基础。
DH参数使用4个参数来表达相邻关节坐标系之间的相对位姿。
DH参数有哪些
DH参数使用4个参数来表达相邻关节坐标系之间的相对位姿。
D-H 参数中的四个关键参数是:
-
连杆长度 (a)
-
沿 X 轴方向,两个相邻关节轴(Z 轴)之间的公垂线长度。
-
它描述了两个连杆之间的水平距离。
-
-
连杆扭角 (α)
-
两个相邻关节轴(Z 轴)之间的扭转角,绕 X 轴旋转使 Z 轴对齐。
-
通常是由于关节轴不平行而产生的角度。
-
-
关节距离 (d)
-
沿 Z 轴方向,相邻两个连杆的 X 轴之间的垂直偏移。
-
对于平移关节,d 是变量;对于旋转关节,d 通常是常数。
-
-
关节角度 (θ)
-
绕 Z 轴旋转,使相邻两个连杆的 X 轴对齐所需的角度。
-
对于旋转关节,θ 是变量;对于平移关节,θ 通常是常数。
-
记忆口诀:
-
长度 a:X 方向的距离。
-
扭角 α:绕 X 轴的旋转角度。
-
距离 d:Z 方向的偏移。
-
角度 θ:绕 Z 轴的旋转角度。
这四个参数完整描述了机器人相邻连杆之间的相对位置和姿态关系,是机器人运动学建模的基础。
这四个参数是如何描述关节之间的变换关系的
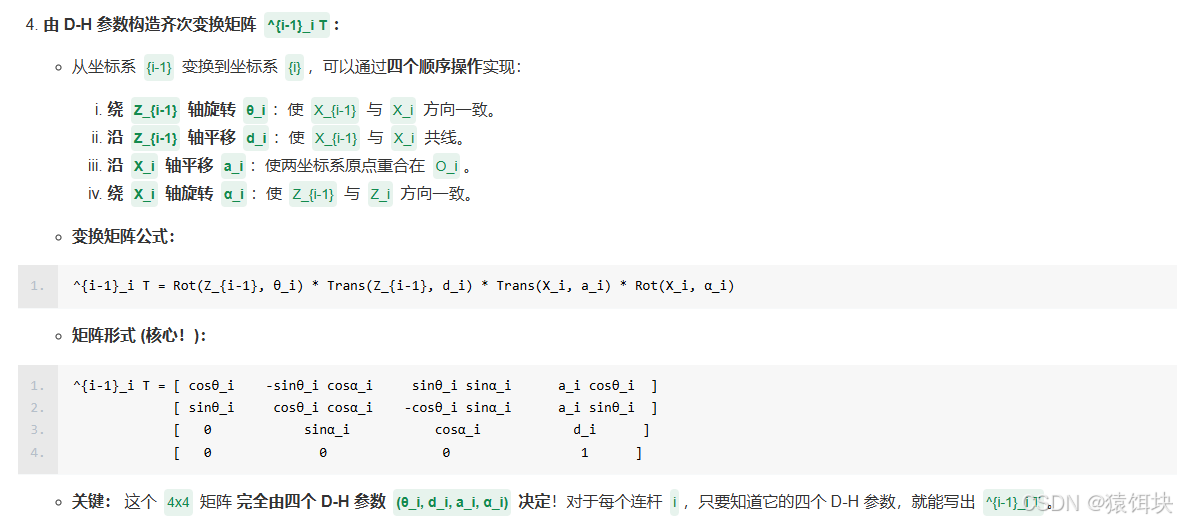
目的就是通过这四个参数实现:
将连杆 i-1 的坐标系 {i-1},变换到连杆 i 的坐标系 {i}。
也就是获取。
结论:
通过使用这四个参数,就可以通过旋转+平移,将一个坐标系旋转平移到另一个坐标系,从而得出两个关节坐标系之间的变换关系。
标准惯例(从基座到末端递增)
-
基座 被定义为连杆 0。
-
第一个可动的关节 是关节 1。
-
第一个可动的连杆 是连杆 1(它由关节 1 驱动)。
-
依此类推:关节 i 连接着连杆 i-1 和连杆 i。
-
末端执行器附着在最后的连杆 n 上。
所以,参数 a_{i-1} 和 α_{i-1} 中的下标 i-1,指的是"前一个"连杆的编号。