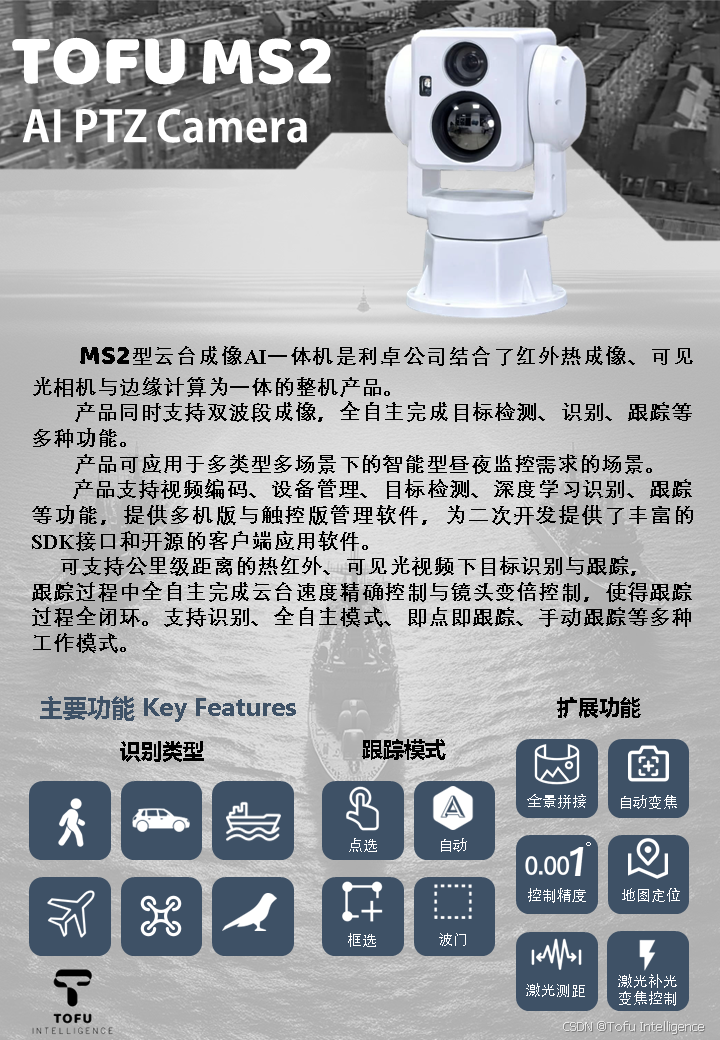
MS2型云台成像AI一体机结合了红外热成像、可见光相机与边缘计算为一体的整机产品。
产品同时支持双波段成像,全自主完成目标检测、识别、跟踪等多种功能。
产品可应用于多类型多场景下的智能型昼夜监控需求的场景。
产品支持视频编码、设备管理、目标检测、深度学习识别、跟踪等功能,提供多机版与触控版管理软件,为二次开发提供了丰富的SDK接口和开源的客户端应用软件。
可支持公里级距离的热红外、可见光视频下目标识别与跟踪,
跟踪过程中全自主完成云台速度精确控制与镜头变倍控制,使得跟踪过程全闭环。支持识别、全自主模式、即点即跟踪、手动跟踪等多种工作模式。
支持目标识别、动目标检测、多种模式跟踪算法、区域动态更新、自适应激光补光等功能。
目标识别
支持热红外视频、可见光视频、微光视频下的人、车、船等物体的深度学习识别,其他类型物体识别算法可定制,提供完整解决方案服务。
目标跟踪
支持全自动跟踪、即点即跟踪、动目标检测跟踪、手动框选跟踪、波门跟踪等多种模式跟踪,并提供跟踪过程中的闭环云台与吊舱运动控制与自适应变倍功能。对于跟踪过程中目标遮挡、目标丢失等情况下提供多种模式的解决方案。
自动跟踪
自动跟踪模式下避免传统的框选的麻烦与波门跟踪中无法自适应目标大小的问题,精确识别到目标类型后自动筛选目标进行跟踪。