一、芯片核心定位
EG3116 是屹晶微电子EG311x系列中的一款 高压半桥栅极驱动芯片,其设计在继承系列核心特性的基础上进行了逻辑优化
核心价值在于 600V高端耐压、2A/2.5A强驱动力、集成VCC/VBS欠压保护,以及独特的 双路高电平有效输入逻辑(HIN & LIN)
专为 逆变器、开关电源、无刷电机驱动器 等应用设计,尤其适合需要对称、直观控制逻辑的半桥或全桥功率级驱动
二、关键电气参数详解
电源与耐压特性
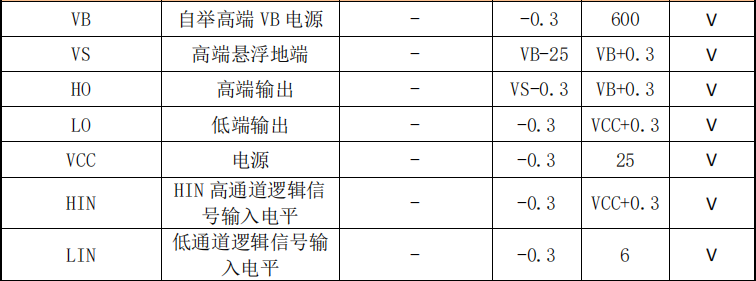
- 低端电源电压(VCC):工作范围 10V 至 20V,典型值 15V
- 高端悬浮电源(VB):绝对最大耐压 600V(相对VS)
- 高端悬浮地(VS):电压范围 VB-25V 至 VB+0.3V,耐压裕量较同系列稍大
静态电流:
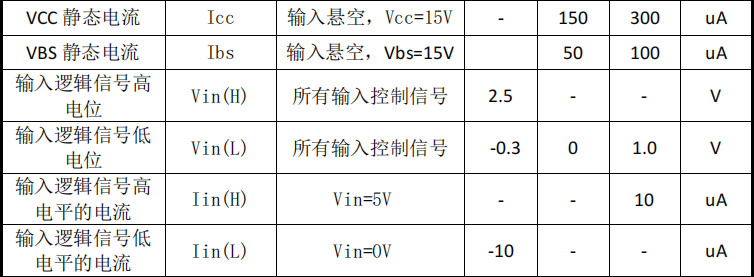
- VCC静态电流(Icc):典型 150μA(最大300μA)
- VBS静态电流(Ibs):典型 50μA(最大100μA)
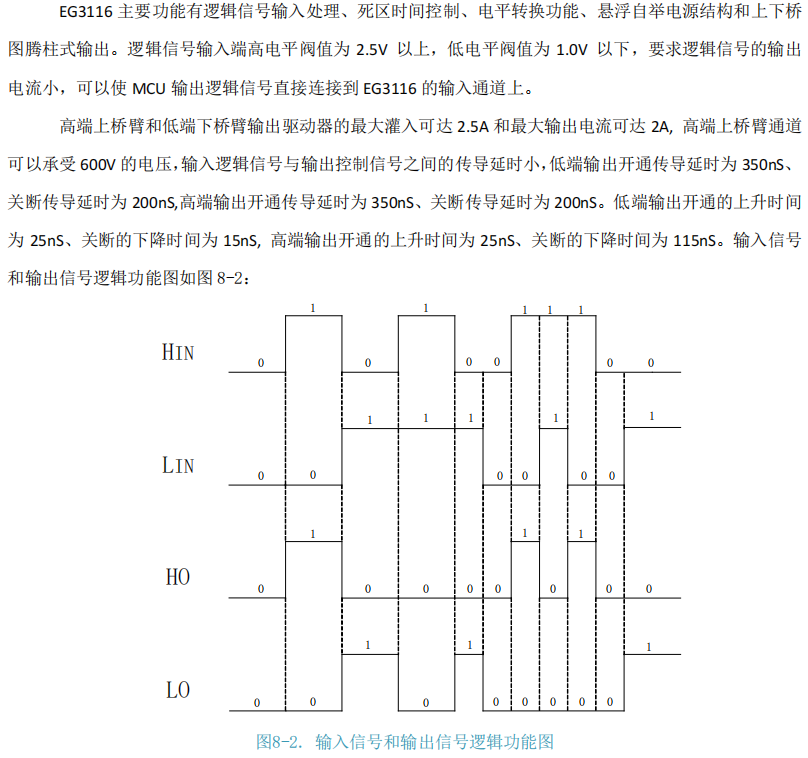
- 逻辑兼容性:输入阈值高电平>2.5V,低电平<1.0V,兼容 3.3V/5V MCU
欠压保护(UVLO)特性(关键安全功能)
-
VCC欠压:
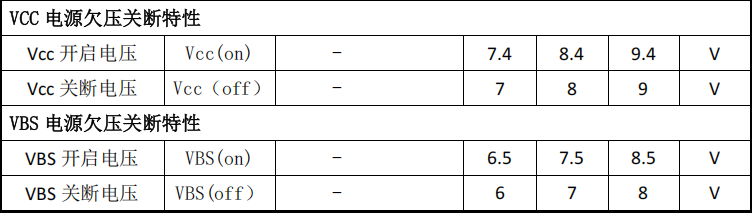
开启阈值(Vcc(on)):典型 8.4V
关断阈值(Vcc(off)):典型 8.0V
迟滞:典型 0.4V
-
VBS(自举电源)欠压:
开启阈值(VBS(on)):典型 7.5V
关断阈值(VBS(off)):典型 7.0V
迟滞:典型 0.5V
-
作用:确保驱动电源电压充足,防止功率管因驱动不足而过热损坏
逻辑输入特性(核心差异点)
- HIN(高端输入):高电平有效,内置 200kΩ下拉电阻
- LIN(低端输入):高电平有效,内置 200kΩ下拉电阻
- 关键变化:与EG3113(HIN高有效,LIN低有效)和EG3113D(同EG3113)不同,EG3116的双输入均为高有效,逻辑控制更直观对称,悬空时均默认低电平(关断)
- 输入电流:极低,高电平最大 10μA,低电平最大 -10μA
输出驱动能力(快速开关)
- 拉电流(IO+):典型 2A(最小1.5A)
- 灌电流(IO-):典型 2.5A(最小2A)

开关时序:
- 开通延时(Ton):典型 350ns(LO与HO相同)
- 关断延时(Toff):典型 200ns(LO与HO相同)
- 上升时间(Tr):典型 20ns(极快)
- 下降时间(Tf):典型 15ns(极快)
- 死区时间(DT):内部集成,典型150ns(范围50-250ns)

三、芯片架构与特性优势
双高有效输入逻辑设计
- HIN与LIN均采用高电平有效的控制方式,使得控制逻辑更加统一和直观,便于MCU编程和故障状态处理(如同时置低可关闭上下管)
- 双路内置下拉电阻,确保悬空时自动关断,增强安全性
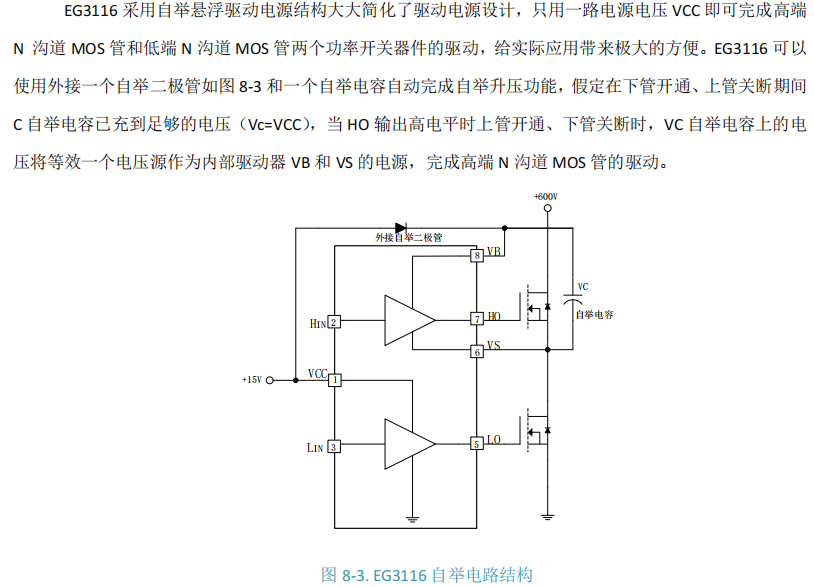
高压悬浮自举与集成欠压保护
- 沿用经典单电源自举架构,简化高压侧供电
- 集成VCC与VBS(自举电压)双路欠压锁定,提升系统在电源异常时的可靠性
超快开关速度与强驱动
- 20ns/15ns的极快上升/下降时间,结合350ns的传输延时,使其开关性能优于EG3113D,更适合高频(支持500kHz)或对开关损耗敏感的应用
- 维持2A/2.5A的峰值电流,确保驱动能力
自适应死区与闭锁
- 提供适中的内部死区时间(150ns),有效防止共通导通
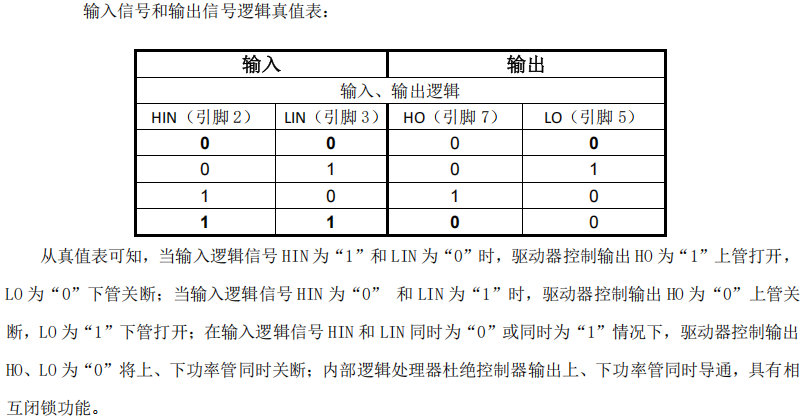
- 内部闭锁逻辑确保任何输入组合下HO与LO不会同时为高
四、应用设计要点
逻辑控制设计(关键差异)
-
必须注意逻辑极性:EG3116的HIN和LIN均为高电平有效。这意味着:
欲开通高端管(HO输出高):需设置 HIN=1, LIN=0
欲开通低端管(LO输出高):需设置 HIN=0, LIN=1
欲关闭上下管:可设置 HIN=0, LIN=0 或 HIN=1, LIN=1
-
在替换EG3113/EG3113D或与其他驱动器混用时,务必重新编写或调整MCU的PWM生成逻辑,否则可能导致异常导通。
电源与自举电路设计
- VCC电压:推荐 10-20V,典型15V。需确保上电速度超过欠压开启阈值(~8.4V)。
- 自举元件:
二极管:必须选用快恢复二极管(如FR107),其反向恢复时间应远小于死区时间。
电容:选用低ESR的陶瓷电容,容值根据开关频率、占空比和栅极电荷计算,通常为0.1-10μF,耐压高于VCC。
旁路电容:在VCC引脚附近必须放置 0.1μF 陶瓷电容。
栅极驱动电阻(Rg)配置
- 由于开关速度极快(Tr/Tf仅20ns/15ns),必须谨慎选择栅极电阻Rg。
- 较小的Rg(如2-10Ω)可充分利用其快速开关特性,降低损耗。
- 但过小的Rg可能导致严重的栅极振铃、EMI问题及米勒效应引起的误开通。建议通过实验确定最佳值,并可在栅极并联一个小电容(如100pF)或使用铁氧体磁珠来抑制振铃。
PCB布局准则(至关重要,尤其针对高速开关)
- 最小化所有高频环路:
驱动环路:VCC旁路电容 → 芯片VCC/GND → 芯片输出(HO/LO)→ 栅极电阻Rg → 功率管栅极 → 功率管源极 → 地。
自举环路:VCC → 自举二极管 → 自举电容 → VS → 低端管源极 → 地。 - 强化的地平面与隔离:
采用星型接地或单点连接,将芯片的信号地(GND)与功率地(MOSFET源极)分开,最后在一点连接。
VS节点是高压浮动点,其走线必须与所有低压走线保持充分的爬电距离和电气间隙。 - 散热:SOP8封装依靠PCB铜箔散热,芯片下方应铺设大面积铜皮并连接至地平面。
五、典型应用场景
- 全桥/半桥逆变器:用于太阳能逆变器、UPS、变频器,其对称逻辑便于生成互补PWM。
- 高频开关电源:如LLC谐振变换器、有源钳位反激,其快速开关能力有助于提升效率。
- 无刷直流(BLDC)电机驱动器:驱动电动车控制器、变频水泵、电动工具中的三相桥臂。
- Class-D音频功放:支持高保真D类功放所需的高频开关。
- 需要直观保护逻辑的系统:双高有效的设计使得在故障时能通过简单置低所有输入来快速关断整个桥臂。
六、调试与常见问题
功率管不动作或动作错误
- 首要检查逻辑信号:确认HIN和LIN的电平是否符合EG3116的双高有效真值表。这是最常见的错误来源。
- 测量VCC/VBS电压:确认是否高于欠压开启阈值(VCC>8.4V, VBS>7.5V)。
- 检查自举电容电压:测量VB-VS电压,应在低端管导通时充电至接近VCC。
开关节点波形振铃严重或有过冲
- 检查PCB布局:驱动环路是否过长?功率回路面积是否最小化?
- 调整栅极电阻Rg:适当增大Rg可以抑制振铃,但会增加开关损耗。
- 检查功率管选型:MOSFET的Cgd(米勒电容)是否过大?考虑选用Cgd更小的型号。
芯片或功率管异常发热
- 确认开关频率:是否超过500kHz?过高的频率会增加芯片自身开关损耗。
- 计算栅极驱动功耗:P_drive = f_sw * Qg_total * VCC,评估是否合理。
- 检查死区时间:确保实际死区时间充足,防止共通导通的短路电流。
高占空比时高端驱动失效
- 增大自举电容容值。
- 检查自举二极管反向漏电流,更换为漏电更小的型号。
- 对于需要接近100%占空比的应用,考虑采用隔离电源为高端独立供电。
七、总结
EG3116 通过采用 双高电平有效输入逻辑、集成VCC/VBS欠压保护 以及提供 优于EG3113D的开关速度 ,在EG311x系列中构成了一个 在性能、安全性和控制逻辑灵活性 上取得平衡 的解决方案
其统一的输入逻辑简化了系统控制设计 ,而快速的开关特性使其在追求高效率的应用中更具优势
成功应用的关键在于 深刻理解并正确配置其独特的输入逻辑真值表、针对其高速特性进行精细的PCB布局和栅极电阻选型,并充分利用其欠压保护功能增强系统鲁棒性
对于需要高频、高性能且控制逻辑直观的半桥驱动应用,EG3116是一款极具竞争力的选择
文档出处
本文基于屹晶微电子(EGmicro)EG3116 芯片数据手册 V1.0 版本整理编写,结合高压栅极驱动设计实践
具体设计与应用请以官方最新数据手册为准,在实际应用中务必重点验证输入逻辑功能、欠压保护阈值及高速开关下的波形质量与稳定性