1、wsl2安装
1、查看可安装ubuntu版本信息:
wsl --list --online
能够看到ubuntu的相关版本
2、安装相应的版本:
wsl --install -d Ubuntu-22.04
3、重启添加安装系统名称和密码:
如果安装了虚拟平台,需要重启一下才能生效:
重启后在菜单栏输入Ubuntu,则会弹出wsl2应用:
点击卡开会,会提示正在安装,然后会让你输入用户名和密码(用户名只能英文小写,密码不显示,其实跟虚拟机的要求是一样的)
2、wsl2打包
1、退出wsl:
输入exit即可在终端退出
2、关闭进程:
wsl --shutdown
3、验证停止:
wsl -l -v
4、备份到F盘:
wsl --export Ubuntu-22.04 F:\ubuntu-backup.tar
5、注销原系统:
wsl --unregister Ubuntu-22.04(会释空间)
3、wsl2移植
1、安装到F盘:
New-Item -Path "F:\WSL_Ubuntu" -ItemType Directory
wsl --import Ubuntu-22.04 F:\WSL_Ubuntu F:\ubuntu-backup.tar
2、更改初始化用户权限:
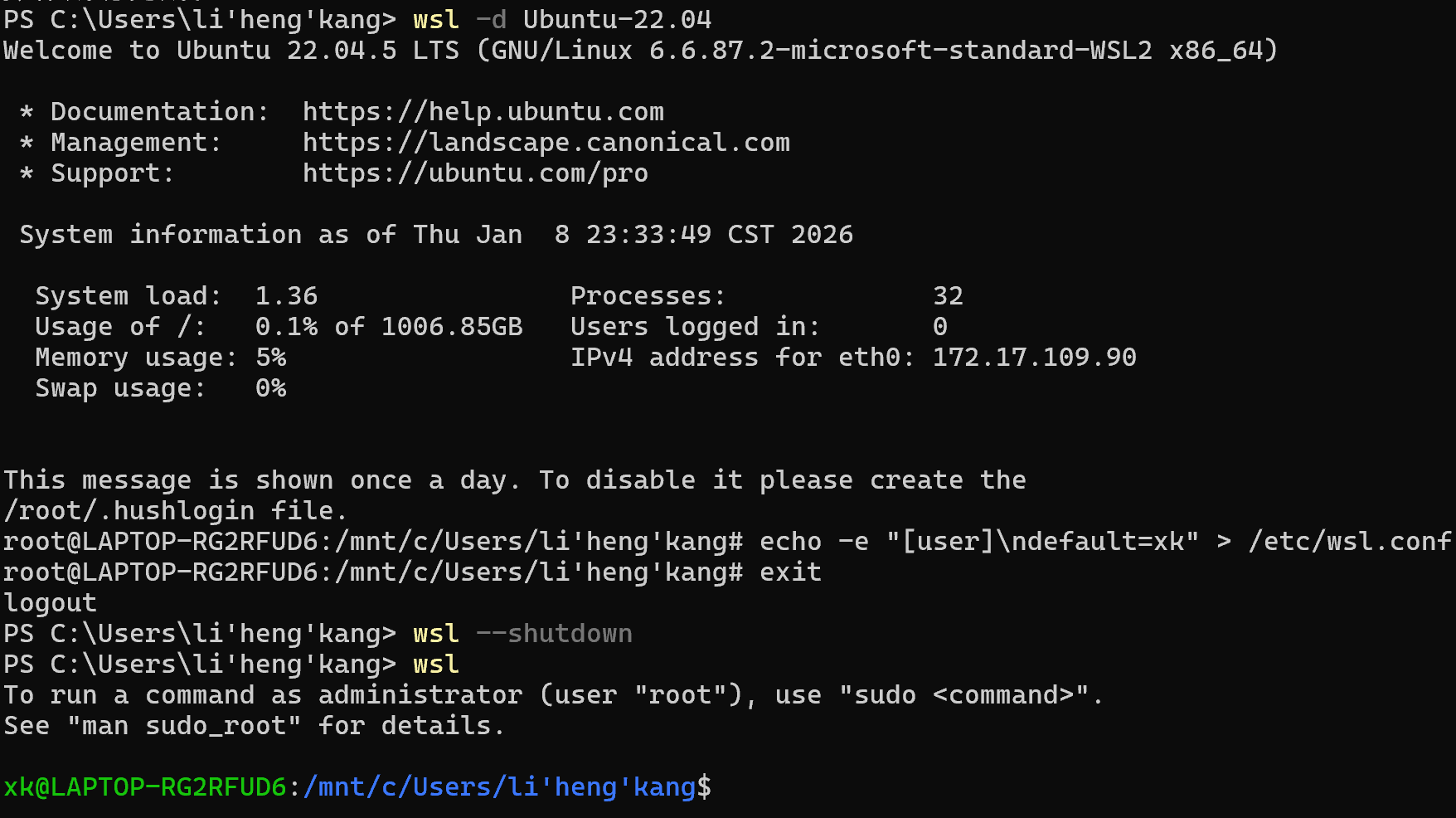
通过wsl --import进行安装的ubuntu,开机后默认是root权限:
wsl -d Ubuntu-22.04启动新系统
echo -e "user\ndefault=xk" > /etc/wsl.conf写入到配置文件中,开机默认是普通用户
输入 exit 退出
在 PowerShell 输入 wsl --shutdown 重启实例
再次输入 wsl 进入。
绿色的就是普通用户
4、ROS2安装
1、鱼香ROS一键安装(建议选择清华源):
wget http://fishros.com/install -O fishros && . fishros
只需要根据提示选择自己需要的就可以
PS:
Run CMD Task:sudo apt install python3-colcon-common-extensions -y
-1.33s CMD Result:code:100
如果出现局部错误,以这个为例:只需要单独补充即可:
1. 更新一下源列表
sudo apt update
2. 手动安装编译工具
sudo apt install python3-colcon-common-extensions -y
2、补充安装pip3和rosdepc
sudo install python3-pip
安装 rosdepc (如果脚本没装的话)
sudo pip3 install rosdepc
初始化
sudo rosdepc init
更新数据库
rosdepc update
5、ROS2测试
1、例子测试:
ros2 run demo_nodes_cpp talker
能够看到发布的话题消息"hello world"就证明核心是没有问题的
2、Gazebo测试:
gazebo --verbose
如果Gazebo测试错误:
sudo apt install python3-colcon-common-extensions -y补充依赖
sudo apt install gazebo ros-humble-gazebo-ros-pkgs -y安装接口包
sudo add-apt-repository universe开启仓库支持:
PS:在 Ubuntu 系统中,软件被分成了几个大类(Main, Restricted, Universe, Multiverse)。Gazebo 属于 Universe(社区维护的开源软件)类别,而 WSL 安装的 Ubuntu 有时默认没有开启这个类别。
6、VScode集成ros
安装WSL插件,即可通过window来控制ros2,以及可以安装很多ros2的插件。