Harris角点检测算法
Harris角点检测是一种经典的角点检测算法,用于检测图像中亮度变化明显的角点(corners)。
角点的定义:在两个垂直方向上都有明显灰度变化的点。
三种图像区域类型:
- 平坦区域 - 所有方向灰度变化都小
- 边缘区域 - 一个方向变化大,垂直方向变化小
- 角点区域 - 所有方向灰度变化都大
原理
- 灰度变化度量
对于图像窗口平移 ( u , v ) (u,v) (u,v),灰度变化 E ( u , v ) E(u,v) E(u,v):
E ( u , v ) = ∑ x , y w ( x , y ) I ( x + u , y + v ) − I ( x , y ) 2 E(u,v) = \sum_{x,y} w(x,y)I(x+u,y+v) - I(x,y)^2 E(u,v)=x,y∑w(x,y)I(x+u,y+v)−I(x,y)2
- I ( x , y ) I(x,y) I(x,y):像素点 ( x , y ) (x,y) (x,y)的灰度值
- w ( x , y ) w(x,y) w(x,y):窗口函数(通常为高斯权重)
- 泰勒展开近似
使用泰勒展开:
I ( x + u , y + v ) ≈ I ( x , y ) + u I x + v I y I(x+u,y+v) \approx I(x,y) + uI_x + vI_y I(x+u,y+v)≈I(x,y)+uIx+vIy
其中 I x = ∂ I ∂ x I_x = \frac{\partial I}{\partial x} Ix=∂x∂I, I y = ∂ I ∂ y I_y = \frac{\partial I}{\partial y} Iy=∂y∂I
代入得:
E ( u , v ) ≈ ∑ w ( x , y ) u 2 I x 2 + 2 u v I x I y + v 2 I y 2 E(u,v) \approx \sum w(x,y)u\^2I_x\^2 + 2uvI_xI_y + v\^2I_y\^2 E(u,v)≈∑w(x,y)u2Ix2+2uvIxIy+v2Iy2
-
结构张量M
E ( u , v ) ≈ u v M u v E(u,v) \approx u \\ v M \begin{bmatrix} u \\ v \end{bmatrix} E(u,v)≈u vMuv其中:
M = ∑ w ( x , y ) I x 2 I x I y I x I y I y 2 M = \sum w(x,y) \begin{bmatrix} I_x^2 & I_xI_y \\ I_xI_y & I_y^2 \end{bmatrix} M=∑w(x,y)Ix2IxIyIxIyIy2 -
Harris响应函数
设 λ 1 \lambda_1 λ1和 λ 2 \lambda_2 λ2是矩阵 M M M的特征值:
- 平坦区域: λ 1 ≈ λ 2 ≈ 0 \lambda_1 \approx \lambda_2 \approx 0 λ1≈λ2≈0
- 边缘区域: λ 1 ≫ λ 2 ≈ 0 \lambda_1 \gg \lambda_2 \approx 0 λ1≫λ2≈0 或 λ 2 ≫ λ 1 ≈ 0 \lambda_2 \gg \lambda_1 \approx 0 λ2≫λ1≈0
- 角点区域: λ 1 \lambda_1 λ1和 λ 2 \lambda_2 λ2都大且相近
定义响应函数:
R = det ( M ) − k ⋅ trace ( M ) 2 R = \det(M) - k \cdot \text{trace}(M)^2 R=det(M)−k⋅trace(M)2
或展开为:
R = λ 1 λ 2 − k ( λ 1 + λ 2 ) 2 R = \lambda_1\lambda_2 - k(\lambda_1 + \lambda_2)^2 R=λ1λ2−k(λ1+λ2)2
其中 k k k是经验常数(通常0.04-0.06)
Harris算法就是在每个像素点上问:
"如果我往四周稍微动一动,看到的景象会大变样吗?"
-
完全不变 → 平坦区域(墙面)
-
只在一个方向变 → 边缘区域(门框)
-
往哪动都大变样 → ⭐角点!(窗户角)
代码实现
python
from utils import *
# 计算角点响应函数
def responseFunc(M):
# 设置超参数
k = 0.04
# 计算M的行列式
det = np.linalg.det(M)
# 计算M的迹
trace = np.trace(M)
# 计算角点响应函数
R = det - k * trace ** 2
return R
# Harris角点检测算法
def harris_corners(src, NMS=False):
# 获得输入图像的长宽
h, w = src.shape[:2]
# 将图像转为灰度图像
gray_image = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
# 初始化角点矩阵
cornerPoint = np.zeros_like(gray_image,dtype=np.float32)
# 计算图像沿横轴和纵轴的梯度
grad = np.zeros((h, w, 2), dtype=np.float32)
# x轴梯度
grad[:,:,0] = cv2.Sobel(gray_image, cv2.CV_16S, 1, 0)
# y轴梯度
grad[:,:,1] = cv2.Sobel(gray_image, cv2.CV_16S, 0, 1)
# 计算黑塞矩阵内元素的值,此时的值是求和的结果,即M矩阵的元素
Ixx = grad[:,:,0] ** 2
Iyy = grad[:,:,1] ** 2
Ixy = grad[:,:,0] * grad[:,:,1]
# 计算窗口内黑塞矩阵元素的值,窗函数使用高斯函数
Ixx = cv2.GaussianBlur(Ixx, (3, 3), sigmaX=2)
Iyy = cv2.GaussianBlur(Iyy, (3, 3), sigmaX=2)
Ixy = cv2.GaussianBlur(Ixy, (3, 3), sigmaX=2)
for i in range(gray_image.shape[0]):
for j in range(gray_image.shape[1]):
# 构建M矩阵
struture_matrix = [[Ixx[i][j], Ixy[i][j]],
[Ixy[i][j], Iyy[i][j]]]
# 计算角点响应函数
R = responseFunc(struture_matrix)
cornerPoint[i][j] = R
# 非最大抑制
corners = np.zeros_like(gray_image, dtype=np.float32)
threshold = 0.01
# 返回所有角点响应的最大值
maxValue = np.max(cornerPoint)
# 我们将角点响应函数的阈值设定为 threshold * maxValue
for i in range(cornerPoint.shape[0]):
for j in range(cornerPoint.shape[1]):
# 如果进行NMS操作
if NMS:
# 当前角点响应值大于阈值,同时也是邻居周围的最大值
if cornerPoint[i][j] > threshold * maxValue and \
cornerPoint[i][j] == np.max(
cornerPoint[max(0, i - 1):min(i + 1, h - 1),
max(0, j - 1):min(j + 1, w - 1)]):
corners[i][j] = 255
else:
# 当前角点响应值大于阈值
if cornerPoint[i][j] > threshold * maxValue:
corners[i][j] = 255
# 返回检测到的角点
return corners输入彩色图像 → 灰度化 → 计算梯度 → 计算结构张量M → 高斯加权 → 计算角点响应R → 阈值处理 → (可选)NMS → 输出角点图
1. 整体结构
代码包含两个主要函数:
responseFunc():计算角点响应函数Rharris_corners():主函数,执行完整的Harris角点检测流程
2. responseFunc() 函数
python
def responseFunc(M):
k = 0.04 # 经验常数,通常取0.04-0.06
det = np.linalg.det(M) # 计算M的行列式
trace = np.trace(M) # 计算M的迹
R = det - k * trace ** 2 # Harris响应函数- 目的:根据结构张量M计算角点响应值R
- 数学原理 :
- 平坦区域:两个特征值都很小,R≈0
- 边缘区域:一个特征值大,一个特征值小,R<0
- 角点区域:两个特征值都很大,R>0
3. harris_corners() 函数
3.1 预处理阶段
python
# 转为灰度图(因为角点检测基于梯度)
gray_image = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
# 初始化角点矩阵
cornerPoint = np.zeros_like(gray_image, dtype=np.float32)3.2 梯度计算
python
# 使用Sobel算子计算x和y方向梯度
grad[:,:,0] = cv2.Sobel(gray_image, cv2.CV_16S, 1, 0) # Ix
grad[:,:,1] = cv2.Sobel(gray_image, cv2.CV_16S, 0, 1) # Iy
# 计算结构张量M的元素
Ixx = grad[:,:,0] ** 2 # Ix²
Iyy = grad[:,:,1] ** 2 # Iy²
Ixy = grad[:,:,0] * grad[:,:,1] # IxIy3.3 窗口加权(高斯滤波)
python
# 使用3×3高斯核平滑,sigma=2
Ixx = cv2.GaussianBlur(Ixx, (3, 3), sigmaX=2)
Iyy = cv2.GaussianBlur(Iyy, (3, 3), sigmaX=2)
Ixy = cv2.GaussianBlur(Ixy, (3, 3), sigmaX=2)- 作用:对梯度乘积进行加权平均,考虑局部邻域信息
- 使用高斯窗口而非矩形窗口,离中心越近权重越大
3.4 构建结构张量并计算响应
python
for i in range(gray_image.shape[0]):
for j in range(gray_image.shape[1]):
# 构建2×2结构张量M
struture_matrix = [[Ixx[i][j], Ixy[i][j]],
[Ixy[i][j], Iyy[i][j]]]
# 计算每个像素的角点响应
R = responseFunc(struture_matrix)
cornerPoint[i][j] = R3.5 阈值处理与非极大值抑制(NMS)
python
# 自适应阈值:最大响应的1%
threshold = 0.01
maxValue = np.max(cornerPoint)
if NMS: # 使用非极大值抑制
# 检查是否为局部极大值(3×3邻域)
if cornerPoint[i][j] > threshold * maxValue and \
cornerPoint[i][j] == np.max(
cornerPoint[max(0, i-1):min(i+1, h-1),
max(0, j-1):min(j+1, w-1)]):
corners[i][j] = 255 # 标记为角点
else: # 不使用NMS
if cornerPoint[i][j] > threshold * maxValue:
corners[i][j] = 255k=0.04:经验常数,控制边缘抑制程度sigmaX=2:高斯核标准差,控制窗口大小threshold=0.01:响应阈值比例因子
5. 输出
函数返回一个二值图像corners,其中255表示检测到的角点位置。
函数调用
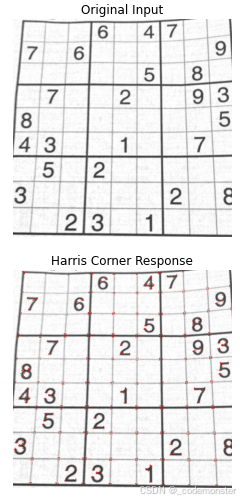
默认NMS为False
python
# 图像素材来自opencvpython网站
img = cv2.imread('sudoku.png')
plt.imshow(img[:, :, ::-1])
plt.axis('off')
plt.title('Original Input')
plt.show()
response = harris_corners(img)
img[response == 255] = [0, 0, 255]
plt.imshow(img[:, :, ::-1])
plt.axis('off')
plt.title('Harris Corner Response')
plt.show()这行代码的作用是:在原图img上将所有检测到的角点位置标记为红色。
python
img[response == 255] = [0, 0, 255]response == 255:创建一个布尔掩码(boolean mask),其中:True:表示response矩阵中值等于255的位置(即检测到的角点)False:表示其他位置
img[response == 255]:使用布尔索引选择img中所有角点位置的像素[0, 0, 255]:BGR格式的红色(OpenCV使用BGR而非RGB)- B=0, G=0, R=255 → 纯红色
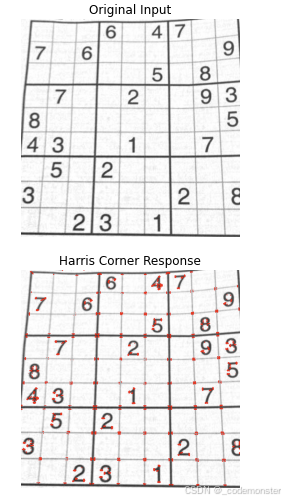
启用NMS
python
# 图像素材来自opencvpython网站
img = cv2.imread('sudoku.png')
plt.imshow(img[:, :, ::-1])
plt.axis('off')
plt.title('Original Input')
plt.show()
response = harris_corners(img,NMS=True)
img[response == 255] = [0, 0, 255]
plt.imshow(img[:, :, ::-1])
plt.axis('off')
plt.title('Harris Corner Response')
plt.show()输出