import sys
import cv2
import math
import numpy as np
import matplotlib.pyplot as plt
size = (320,240)
range_rgb = {'red': (0, 0, 255), 'blue': (255, 0, 0), 'green': (0, 255, 0)}
__target_color = ('red', 'green', 'blue')
#LAB颜色空间红、蓝、绿的颜色范围,即在(0, 160, 135) ~(255, 255, 255)之间认为是红色,以此类推
lab_data_max = {'red': (255, 255, 255), 'black': ( 89, 255, 255), 'blue': ( 255, 254, 90), 'green': ( 255, 120, 180), 'white': ( 255, 255, 255)}
lab_data_min = {'red': (0, 160, 135), 'black': ( 0, 0, 0), 'blue': ( 0, 120, 0), 'green': ( 0, 0, 100), 'white': ( 193, 0, 0)}
#在轮廓列表中获取面积最大的轮廓,返回面积最大的轮廓和该轮廓的面积
def GetAreaMaxContour(contours):
coutousAreaMax = 0
coutoursMax = None
for c in contours:
coutoursAreaTmp = math.fabs(cv2.contourArea(c))
if coutoursAreaTmp > coutousAreaMax :
coutoursAreaMax = coutoursAreaTmp
coutoursMax = c
return coutoursAreaMax , coutoursMax
#坐标的映射,根据轮廓尺寸等比例映射
def map( x , in_min , in_max , out_min , out_max ):
return (x-in_min)*(out_max-out_min)/(in_max-in_min) + out_min
#主函数
if __name__=="__main__":
img = cv2.imread("test10.1.jpg")
img_h,img_w = img.shape[:2] #获取图片的尺寸
img_red = img
img_blue = img
img_green=img
frm_resize = cv2.resize(img , size , interpolation=cv2.INTER_NEAREST) #为简化处理,加快处理速度,将图片缩小
frm_gb = cv2.GaussianBlur( frm_resize,(3,3),3) #高斯滤波
frm_lab = cv2.cvtColor(frm_gb , cv2.COLOR_BGR2LAB) #为便于确定颜色,转成LAB颜色空间
Coutour_Max = None
Coutour_Max_Area = 0
for i in lab_data_max:
if i in __target_color:
frm_mask=cv2.inRange( frm_lab , (lab_data_min[i][0],lab_data_min[i][1],lab_data_min[i][2]),
(lab_data_max[i][0],lab_data_max[i][1],lab_data_max[i][2]))#范围内颜色转成黑白
opened = cv2.morphologyEx( frm_mask, cv2.MORPH_OPEN ,np.ones((3,3),np.uint8))
closed = cv2.morphologyEx( opened, cv2.MORPH_CLOSE ,np.ones((3,3),np.uint8)) #开合操作,去除非连续点
contours= cv2.findContours( closed, cv2.RETR_EXTERNAL ,cv2.CHAIN_APPROX_NONE)[-2] #找轮廓
Coutour_TmpMax_Area , Coutour_TmpMax=GetAreaMaxContour(contours) #寻找面积最大的轮廓
if Coutour_TmpMax is not None:
if Coutour_TmpMax_Area > Coutour_Max_Area :
Coutour_Max_Area = Coutour_TmpMax_Area
Coutour_Max = Coutour_TmpMax
Coutour_Max_Color = i
if i == "red" :
img_red = closed
if i == "blue" :
img_blue = closed
if i == "green" :
img_green = closed
#展示最终的效果
(center_x,center_y),radius = cv2.minEnclosingCircle(Coutour_Max)
center_x = int(map( center_x , 0 ,size[0], 0 ,img_w))
center_y = int(map( center_y , 0 ,size[1], 0 , img_h))
radius = int(map( radius , 0 ,size[0] , 0 ,img_w))
cv2.circle( img , (int(center_x),int(center_y)) , int( radius) , range_rgb[Coutour_Max_Color], 2)
cv2.putText(img, "Color: " + Coutour_Max_Color, (10, img.shape[0] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.65, range_rgb[Coutour_Max_Color], 2)
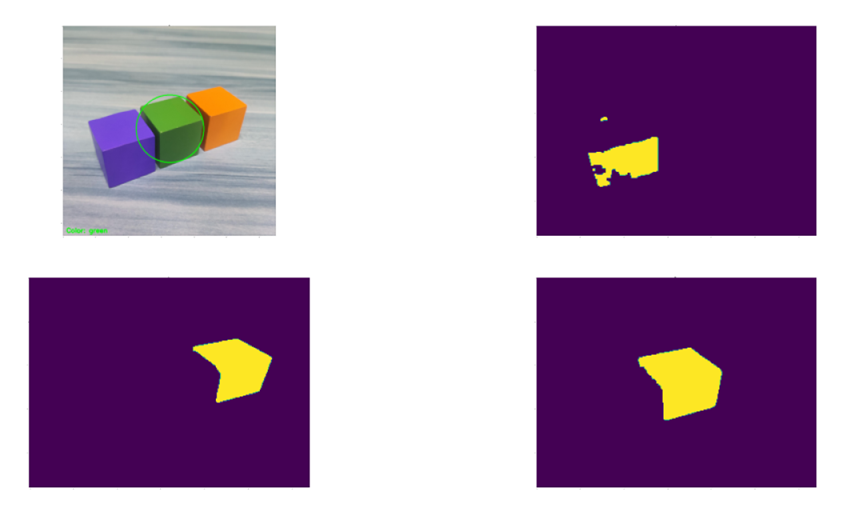
plt.figure(figsize=(200,100),dpi=6)
plt.subplot(221),plt.imshow(img),plt.title("org")
plt.subplot(222),plt.imshow(img_red),plt.title("red")
plt.subplot(223),plt.imshow(img_blue),plt.title("blue")
plt.subplot(224),plt.imshow(img_green),plt.title("green")
plt.show()
cv2.waitKey(0)
cv2.destoryAllWindows()