软件架构设计
嵌入式系统的软件架构直接决定程序的执行效率、实时响应能力和可维护性,常见架构从简单到复杂分为轮询式、前后台式和多任务式三类,适用于不同的应用场景。
轮询式架构
轮询式架构是最基础的嵌入式软件架构,核心逻辑是"初始化+顺序循环执行"。程序启动后先完成所有硬件的初始化配置,随后进入死循环,将需要执行的功能按预设顺序依次执行,不响应外部突发事件。
核心特点:结构简单、可靠性高、资源占用少;缺点是实时性差,无法处理突发外部事件,仅适用于功能单一、无紧急事件需求的场景(如简单的LED循环闪烁)。
c
/**
* 轮询式架构主函数
* @brief 先完成硬件初始化,再进入死循环按顺序执行各功能
* @note 无参数,无返回值(主函数返回值无实际意义,嵌入式中通常不返回)
* @attention 该架构不支持外部事件响应,所有功能必须按顺序执行
*/
int main()
{
// 硬件初始化:初始化需要用到的所有外设
LED_Init(); // LED外设初始化
BEEP_Init(); // 蜂鸣器外设初始化
KEY_Init(); // 按键外设初始化
// 其他硬件初始化...
// 进入死循环,按顺序轮询执行功能
while(1) // 等价于for(;;),死循环标识
{
// LED控制功能:如循环点亮、熄灭
LED_Control();
// 按键检测功能:仅能被动检测,无按键中断
if(KEY_Scan(KEY0_GPIO_PORT, KEY0_GPIO_PIN) == KEY_PRESSED)
{
// 按键按下后的处理逻辑
BEEP_Toggle();
}
// 蜂鸣器控制功能
BEEP_Control();
// 其他功能...
}
}前后台架构
前后台架构是在轮询式架构基础上引入"中断机制"的优化架构。将程序分为"前台"和"后台"两部分:前台由中断服务程序(ISR)组成,负责响应外部突发事件(如按键按下、传感器数据就绪);后台就是原轮询式的主循环,负责执行常规、非紧急的功能。
核心特点:实时性提升,能及时响应外部突发事件;中断会打断后台主循环的执行,处理完后返回断点继续执行;适用于有少量紧急事件、功能不算复杂的场景。
c
/**
* 信号回调函数(前台中断服务函数)
* @brief 处理SIGUSR1信号对应的外部事件,属于前台执行逻辑
* @param signum:信号编号,标识当前触发的信号类型(此处为SIGUSR1)
* @note 中断函数需简洁高效,避免复杂逻辑和长时间阻塞
*/
void Signal_CallBack(int signum)
{
// 外部事件处理逻辑:如紧急数据采集、故障报警
if(signum == SIGUSR1)
{
// 信号SIGUSR1对应的处理:如翻转LED表示事件响应
LED_Toggle(LED1_GPIO_PORT, LED1_GPIO_PIN);
}
}
/**
* 前后台架构主函数
* @brief 初始化硬件和信号注册,启动后台主循环
* @note 无参数,无返回值
* @attention 注册信号后,前台中断可打断后台主循环
*/
int main()
{
// 硬件初始化:与轮询式一致
LED_Init();
BEEP_Init();
KEY_Init();
// 其他硬件初始化...
// 信号注册:将SIGUSR1信号与回调函数绑定,完成前台配置
// 第一个参数:要注册的信号类型(SIGUSR1为用户自定义信号)
// 第二个参数:信号触发后的回调函数(即前台中断处理函数)
signal(SIGUSR1, Signal_CallBack);
// 后台主循环:执行常规功能
while(1)
{
// LED常规控制
LED_Normal_Control();
// 蜂鸣器常规控制
BEEP_Normal_Control();
// 其他非紧急功能...
}
}多任务架构
多任务架构是在前后台架构基础上引入"操作系统调度"的高级架构。外部事件的响应仍通过中断完成,但事件的具体处理逻辑封装在"任务"中;每个任务是独立的死循环,拥有自己的优先级,由操作系统(如RT-Thread、FreeRTOS)的调度器负责按优先级调度执行。
核心特点:实时响应能力更强,支持多事件并行处理(宏观上);任务独立封装,代码可维护性高;调度器根据任务优先级决定执行顺序,高优先级任务可抢占低优先级任务;适用于功能复杂、多紧急事件并发的场景。
RT-Thread是嵌入式实时多线程操作系统,任务通过线程实现。由于处理器核心同一时刻只能执行一个任务,调度器通过快速切换任务(毫秒级)营造"多任务同时运行"的错觉,切换依据是任务优先级。
c
/**
* 触摸屏坐标获取任务(线程回调函数)
* @brief 独立任务,循环获取触摸屏坐标并处理
* @param arg:任务参数,由创建任务时传入(此处为NULL,无参数)
* @return void*:任务返回值,嵌入式多任务中通常返回NULL
* @note 任务是独立死循环,不能返回,需由操作系统调度执行
*/
void *tspad_thread(void *arg)
{
while(1)
{
// 功能逻辑:获取触摸屏坐标并处理
int x = TouchPad_GetX();
int y = TouchPad_GetY();
TouchPad_Process(x, y);
// 任务延时:释放CPU,让调度器切换其他任务
usleep(10); // 延时10微秒
}
}
/**
* 多任务架构主函数
* @brief 初始化硬件,创建任务,启动任务调度
* @note 无参数,无返回值
* @attention 主函数最后需调用线程退出函数,将CPU控制权交给调度器
*/
int main()
{
// 1. 硬件初始化:初始化所有外设
TouchPad_Init();
LED_Init();
// 其他硬件初始化...
// 2. 创建新线程(任务)
pthread_t id; // 线程ID,用于标识创建的线程
// 第一个参数:线程ID指针,用于接收创建后的线程ID
// 第二个参数:线程属性,NULL表示使用默认属性
// 第三个参数:线程回调函数(任务执行逻辑)
// 第四个参数:任务参数,传递给回调函数
pthread_create(&id, NULL, tspad_thread, NULL);
// 3. 主函数退出线程,将CPU控制权交给调度器
// 参数:线程返回值,NULL表示无返回值
pthread_exit(NULL);
}MCU中断的原理与应用
中断是MCU对外界紧急事件的实时响应机制,核心作用是让CPU暂停当前任务,优先处理紧急事件,处理完成后回到原任务断点继续执行,是提升系统实时性的关键技术。
中断概念
中断:当CPU正在执行主程序时,外界发生紧急事件(如按键按下、定时器溢出),请求CPU暂停当前工作转去处理该事件,处理完成后返回原断点继续执行主程序的过程,称为中断。
核心组件:
- 中断源:引发中断的事件或设备(如按键、定时器、串口等);
- 中断系统:实现中断功能的硬件部件(含中断控制器、向量表等);
- 中断服务程序(ISR):处理中断事件的专用程序,是中断处理的核心逻辑。
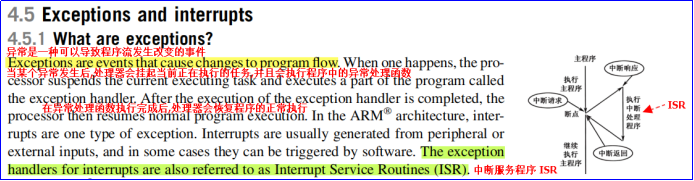
在ARM架构中,中断是"异常"的一种。异常是导致程序流程改变的事件,中断通常由外设或外部输入产生,也可由软件触发。
中断请求
中断请求是中断源向CPU发出的"紧急处理请求"信号。每个中断源的含义和处理方式已在MCU内核中预先定义,MCU通过"中断向量表"管理所有中断源。
中断向量表:本质是一段连续的内存空间,存储所有中断/异常对应的"处理程序入口地址",相当于中断服务程序的"索引目录"。当中断触发时,MCU通过中断向量表快速查找对应的ISR入口地址,跳转到ISR执行。
关键知识点:
- STM32F4系列的中断向量表包含复位、NMI(不可屏蔽中断)、HardFault(硬件错误)、各类外设中断等,具体可参考STM32F4中文参考手册或stm32f4xx.h 中的枚举IRQn;
- 不可屏蔽中断(NMI)优先级最高,无法被禁止,通常用于时钟安全系统等关键故障处理;
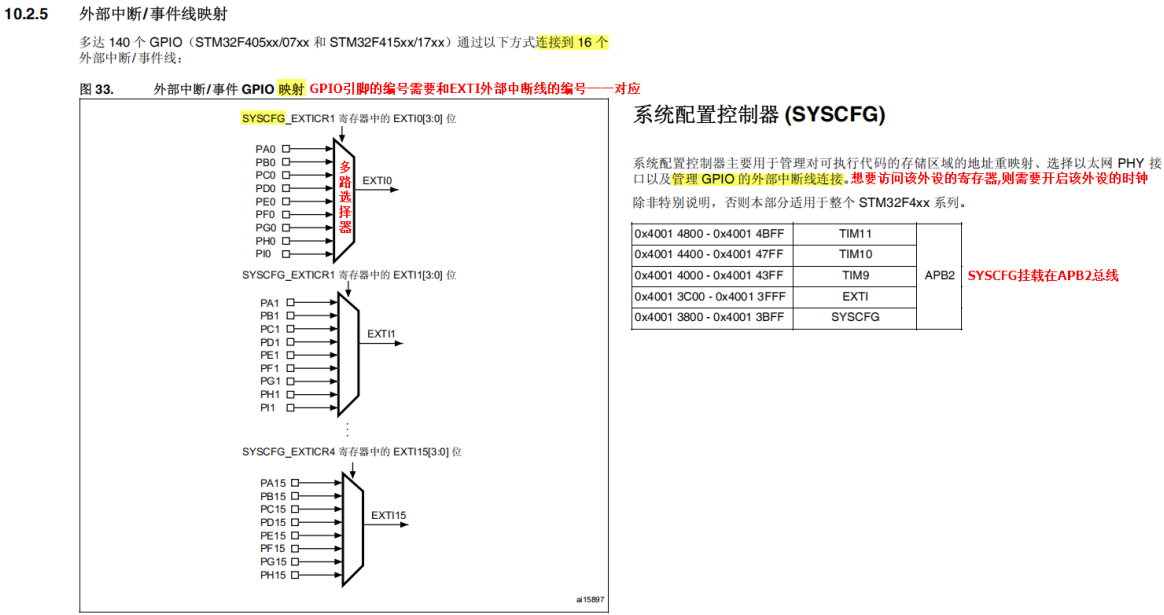
- 每个GPIO引脚都可配置为中断源,但仅对应16根外部中断线(EXTI0~EXTI15),需通过SYSCFG外设完成GPIO与中断线的映射。
中断管理
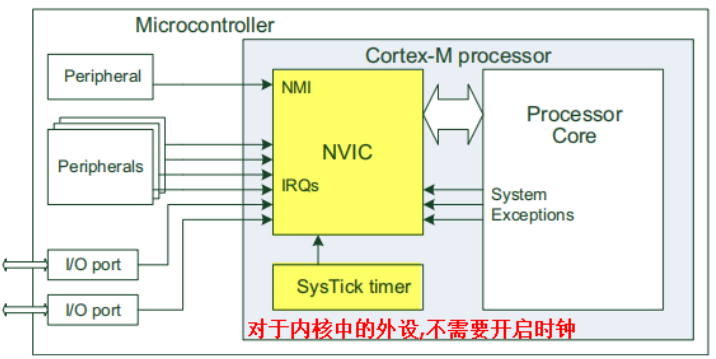
中断管理的核心是"优先级排序"和"中断嵌套",由嵌套向量中断控制器(NVIC)实现。NVIC是MCU内核的外设模块,负责中断的使能/失能、优先级设置、中断响应与处理等。
中断优先级
当多个中断源同时请求时,CPU优先响应优先级高的中断。STM32的中断优先级分为两级:
- 抢占式优先级(主优先级):高优先级可打断正在执行的低优先级中断,实现中断嵌套;
- 响应优先级(子优先级):抢占优先级相同时,优先响应子优先级高的中断,但无法打断正在执行的同抢占优先级中断。
优先级分组:STM32通过4位二进制数表示优先级(共16级,0~15,数字越小优先级越高),通过NVIC_PriorityGroupConfig函数将4位分为抢占优先级和响应优先级的位数,共5种分组方式:
| 优先级分组 | 抢占优先级位数 | 响应优先级位数 | 抢占优先级范围 | 响应优先级范围 |
|---|---|---|---|---|
| NVIC_PriorityGroup_0 | 0 | 4 | 仅0级 | 0~15级 |
| NVIC_PriorityGroup_1 | 1 | 3 | 0~1级 | 0~7级 |
| NVIC_PriorityGroup_2 | 2 | 2 | 0~3级 | 0~3级 |
| NVIC_PriorityGroup_3 | 3 | 1 | 0~7级 | 0~1级 |
| NVIC_PriorityGroup_4 | 4 | 0 | 0~15级 | 仅0级 |
注意:优先级分组需在主程序入口调用,且整个项目仅调用一次,否则会导致中断管理混乱,常用分组4(全为抢占优先级)。
中断嵌套
当CPU正在执行低优先级中断的ISR时,若有高优先级中断请求,CPU会暂停当前低优先级ISR,转去执行高优先级ISR,高优先级ISR执行完成后,返回低优先级ISR断点继续执行,这个过程称为中断嵌套。支持中断嵌套的系统为多级中断系统,否则为单级中断系统。
NVIC核心函数
c
/**
* NVIC初始化函数
* @brief 根据传入的参数配置NVIC的中断通道、优先级等
* @param NVIC_InitStruct:指向NVIC_InitTypeDef结构体的指针,包含NVIC配置信息
* 结构体成员说明:
* - NVIC_IRQChannel:中断通道号(如EXTI0_IRQn对应EXTI0中断)
* - NVIC_IRQChannelPreemptionPriority:抢占式优先级
* - NVIC_IRQChannelSubPriority:响应式优先级
* - NVIC_IRQChannelCmd:中断使能/失能(ENABLE/DISABLE)
* @retval None:无返回值
* @note 调用此函数前必须先调用NVIC_PriorityGroupConfig设置优先级分组
*/
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct)
{
// 函数内部实现逻辑:根据结构体参数配置NVIC寄存器
}中断执行顺序规则
- 抢占优先级高的中断可打断正在执行的抢占优先级低的中断;
- 抢占优先级相同的多个中断同时发生,响应优先级高的先执行;
- 抢占优先级相同的中断,响应优先级高的无法打断响应优先级低的;
- 抢占优先级和响应优先级都相同的多个中断同时发生,按中断向量表中的中断编号顺序执行。
EXTI外设的基本原理与应用
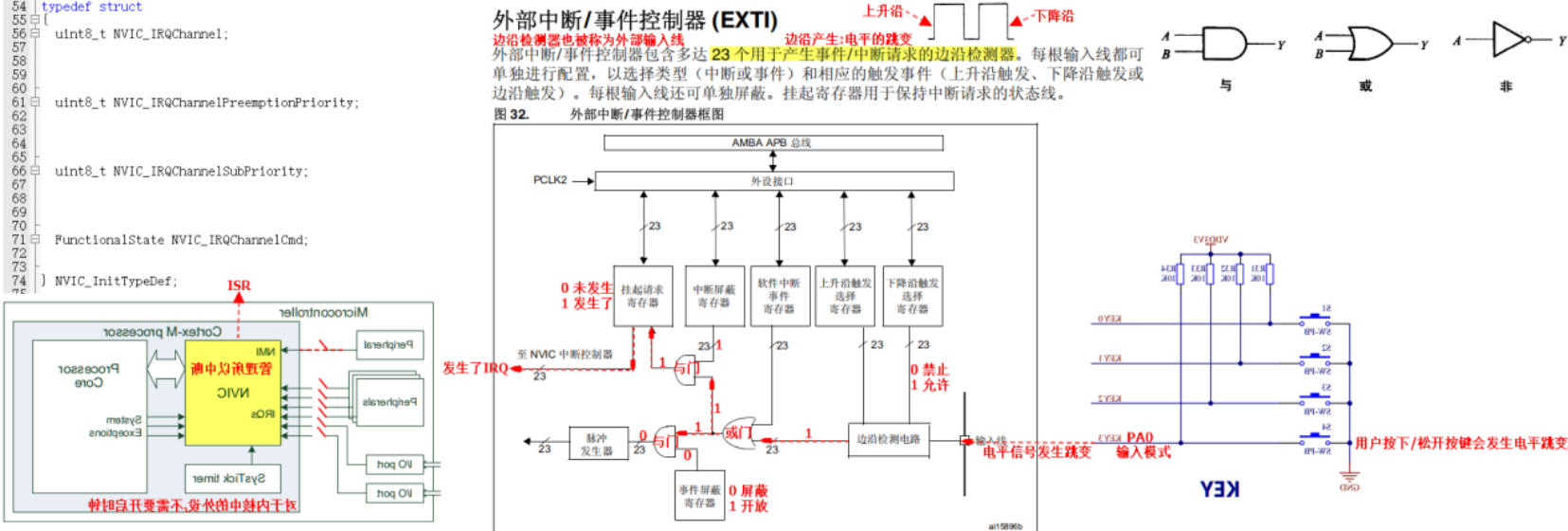
EXTI(External Interrupt/Event Controller)即外部中断/事件控制器,用于管理MCU的外部中断和事件请求,共23个通道,每个通道配备边沿检测器,支持上升沿、下降沿或双边沿触发,可实现GPIO引脚的外部中断功能。
基本概念
- 外部中断线:共16根(EXTI0~EXTI15),用于连接GPIO引脚,GPIO引脚编号需与中断线编号一一对应(如PA0对应EXTI0、PB1对应EXTI1等);
- SYSCFG外设:系统配置控制器,负责GPIO与EXTI中断线的映射,访问SYSCFG前需先开启其时钟(挂载在APB2总线);
- 中断与事件的区别:中断会触发CPU跳转至ISR处理,事件仅触发外设操作(如定时器启动),不占用CPU资源。
注意:STM32F4所有IO口都可配置为外部中断,但必须将GPIO引脚配置为输入模式(上拉、下拉或浮空输入)。
基本原理
EXTI的核心工作流程:
- GPIO引脚检测到电平跳变(上升沿/下降沿),通过SYSCFG映射到对应的EXTI中断线;
- EXTI边沿检测器检测到跳变后,向挂起请求寄存器写入"1",表示有中断请求;
- 若该中断线未被屏蔽(中断屏蔽寄存器为"0"),则将中断请求发送至NVIC;
- NVIC根据优先级配置响应中断,跳转至对应的ISR执行;
- ISR执行完成后,需清除EXTI挂起寄存器的标志位,避免重复响应。
程序设计步骤与代码实现
以"PA0引脚(KEY0按键)触发EXTI0中断,中断后翻转PF9引脚(LED0)状态"为例,程序设计步骤如下:
步骤1:添加相关文件并配置工程
将EXTI和SYSCFG外设的源文件(stm32f4xx_exti.c、stm32f4xx_syscfg.c、misc.c)添加到项目中,并在编译器中配置包含路径(如DEVICE_LIB/inc)。
步骤2:初始化相关时钟
开启GPIOA(PA0------按键)、GPIOF(PF9------LED)和SYSCFG的时钟:
c
/**
* 时钟初始化函数
* @brief 开启GPIOA、GPIOF和SYSCFG的时钟
* @retval None:无返回值
* @note SYSCFG挂载在APB2总线,GPIOA和GPIOF挂载在AHB1总线
*/
void EXTI_Clock_Init(void)
{
// 使能AHB1总线时钟:GPIOA和GPIOF
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA | RCC_AHB1Periph_GPIOF, ENABLE);
// 使能APB2总线时钟:SYSCFG
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
}步骤3:配置GPIO引脚
配置PA0为输入模式,PF9为输出模式(推挽输出):
c
/**
* GPIO初始化函数
* @brief 配置PA0为下拉输入(按键),PF9为推挽输出(LED)
* @retval None:无返回值
*/
void EXTI_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
// 配置PA0(KEY0)为下拉输入
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; // 引脚0
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN; // 输入模式
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; // 外部有上拉电阻
GPIO_Init(GPIOA, &GPIO_InitStruct); // 初始化GPIOA
// 配置PF9(LED1)为推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9; // 引脚9
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; // 输出模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; // 推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; // 输出速度50MHz
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; // 无上下拉
GPIO_Init(GPIOF, &GPIO_InitStruct); // 初始化GPIOF
// 初始状态:LED熄灭
GPIO_SetBits(GPIOF, GPIO_Pin_9);
}步骤4:配置EXTI与GPIO映射
通过SYSCFG将PA0映射到EXTI0,并配置EXTI0为上升沿触发:
c
/**
* EXTI初始化函数
* @brief 配置PA0与EXTI0的映射,设置EXTI0为上升沿触发
* @retval None:无返回值
*/
void EXTI_Init_Config(void)
{
EXTI_InitTypeDef EXTI_InitStruct;
// 配置GPIOA0与EXTI0的映射
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
// 配置EXTI0
EXTI_InitStruct.EXTI_Line = EXTI_Line0; // 中断线0
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; // 中断模式(非事件模式)
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising; // 上升沿触发(按键松开时触发)
EXTI_InitStruct.EXTI_LineCmd = ENABLE; // 使能中断线0
EXTI_Init(&EXTI_InitStruct); // 初始化EXTI
}步骤5:配置NVIC
设置优先级分组,配置EXTI0中断的优先级并使能:
c
/**
* NVIC配置函数
* @brief 设置优先级分组,配置EXTI0中断的抢占优先级和响应优先级
* @retval None:无返回值
* @note 此处设置优先级分组为4,EXTI0抢占优先级为2
*/
void EXTI_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStruct;
// 设置优先级分组为4(全抢占优先级)
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
// 配置EXTI0中断通道
NVIC_InitStruct.NVIC_IRQChannel = EXTI0_IRQn; // 中断通道:EXTI0
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2; // 抢占优先级2
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0; // 响应优先级0(分组4下无意义)
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; // 使能该中断通道
NVIC_Init(&NVIC_InitStruct); // 初始化NVIC
}步骤6:编写EXTI0中断服务函数
中断服务函数需在stm32f4xx_it.c文件中实现,函数名必须与启动文件向量表中的名称一致(EXTI0_IRQHandler):
c
/**
* EXTI0中断服务函数
* @brief 处理EXTI0中断请求,实现LED翻转
* @retval None:无返回值
* @note 1. 函数名必须与启动文件向量表中的名称一致,否则会进入默认死循环
* 2. 需先判断中断是否发生,处理完成后清除中断挂起标志
*/
void EXTI0_IRQHandler(void)
{
// 判断EXTI0中断是否发生(避免误触发)
if(EXTI_GetITStatus(EXTI_Line0) != RESET)
{
// 中断处理逻辑:翻转PF9引脚状态(LED亮灭切换)
GPIO_ToggleBits(GPIOF, GPIO_Pin_9);
// 清除EXTI0中断挂起标志位(必须清除,否则会重复响应)
EXTI_ClearITPendingBit(EXTI_Line0);
}
}步骤7:主函数调用初始化函数
c
int main(void)
{
// 初始化流程
EXTI_Clock_Init();
EXTI_GPIO_Init();
EXTI_Init_Config();
EXTI_NVIC_Config();
// 主循环(后台逻辑)
while(1)
{
// 其他常规功能...
}
}STM32启动文件分析
启动文件是程序运行后第一个执行的文件,由汇编语言编写,负责完成MCU启动前的底层初始化工作,最终跳转到C语言主函数(main)。STM32的启动文件位于CMSIS/Device/ST/STM32F4xx/Source/Templates/arm目录下,如startup_stm32f40_41xxx.s。
核心功能
启动文件的核心功能的是完成"底层初始化"和"引导至main函数",具体包括4个关键步骤:
堆栈空间初始化
堆栈是程序运行的基础,用于存储函数局部变量、函数调用返回地址、中断上下文等。启动文件中通过定义栈大小(Stack Size)和堆大小(Heap Size),分配连续的内存空间,并初始化堆栈指针(SP)。
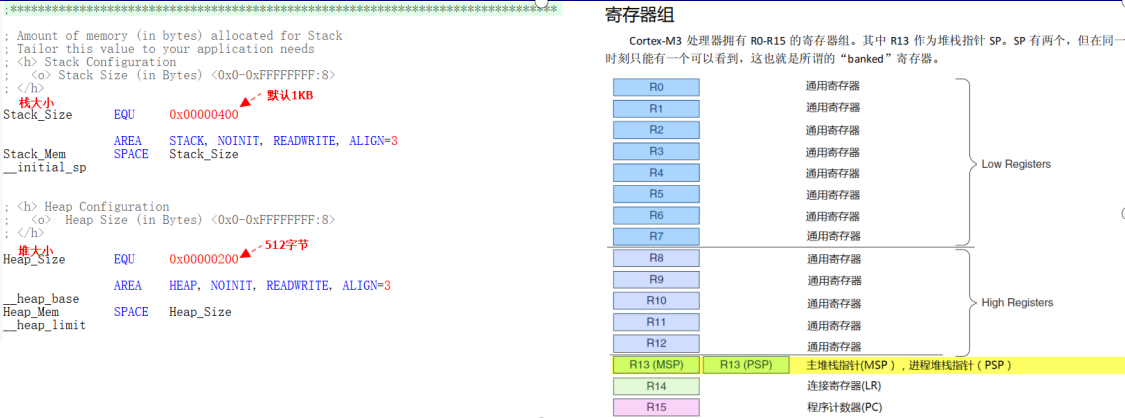
注意:若程序中局部变量过多、函数嵌套层数过深,可能导致栈溢出(程序卡死),需适当增大Stack_Size。
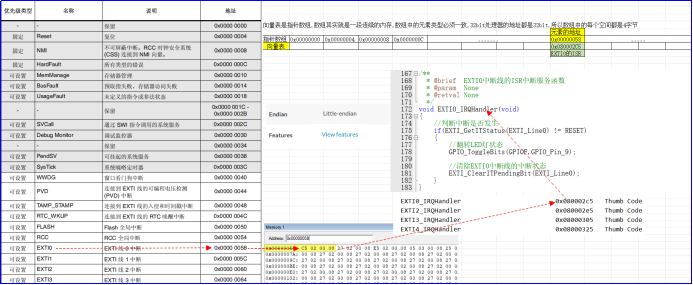
设置中断向量表
中断向量表是存储所有中断/异常服务程序入口地址的指针数组。启动文件中定义了向量表的起始地址和各个中断/异常的入口地址,MCU复位后会自动读取向量表,确保中断发生时能准确跳转到对应的ISR。
关键说明:
- 向量表的第一个元素是栈顶指针(initial_sp),第二个元素是复位中断服务程序入口地址(Reset_Handler);
- 启动文件中通过"弱声明(WEAK)"定义了所有中断的默认处理函数(Default_Handler),默认行为是死循环;
- 用户需在C文件中重新定义需要使用的中断服务函数,函数名必须与向量表中的名称一致,否则会执行默认死循环。
系统时钟初始化
复位是一种特殊的异常,MCU复位后会自动跳转到复位中断服务程序(Reset_Handler)。该程序由启动文件实现,核心功能是初始化系统时钟(如将HSI、HSE时钟配置为系统时钟,设置 PLL 倍频等),并调用SystemInit函数完成时钟配置。
跳转到main函数
完成堆栈、向量表、时钟的初始化后,复位中断服务程序会通过"B main"指令跳转到C语言的main函数,此时CPU控制权交给用户编写的应用程序,启动文件的使命完成。
启动流程总结
复位后先执行启动文件,初始化堆栈空间和设置中断向量表,再跳到中断服务函数调用SystemInit初始化Flash和时钟,最终跳到main函数。
注意事项
- 中断服务函数必须精简高效,避免复杂逻辑和长时间阻塞,若需复杂处理,可在ISR中设置标志位,回到main函数的后台循环中处理;
- 启动文件是汇编文件(.s后缀),在程序运行前执行,用户无需修改,仅需在C文件中实现所需的中断服务函数;
- 不同型号的STM32对应不同的启动文件,需根据MCU型号选择正确的启动文件,否则会导致程序无法正常启动。