注1:本文系"视觉方向大厂面试·硬核通关"专栏文章。本专栏致力于对多模态大模型/CV领域的高频高难面试题进行深度拆解。本期攻克的难题是:DDPM(去噪扩散概率模型)的数学原理与推导。
DDPM数学原理全景解构:从变分推断到工业级实现的深度解析
一、面试原题复现
面试官提问:请从数学原理出发,完整推导DDPM的变分下界(ELBO)推导过程,并解释为何可以将训练目标简化为预测噪声。同时,手写DDPM的核心训练代码实现,并分析其与Score-Based生成模型的本质联系。
二、关键回答(The Hook)
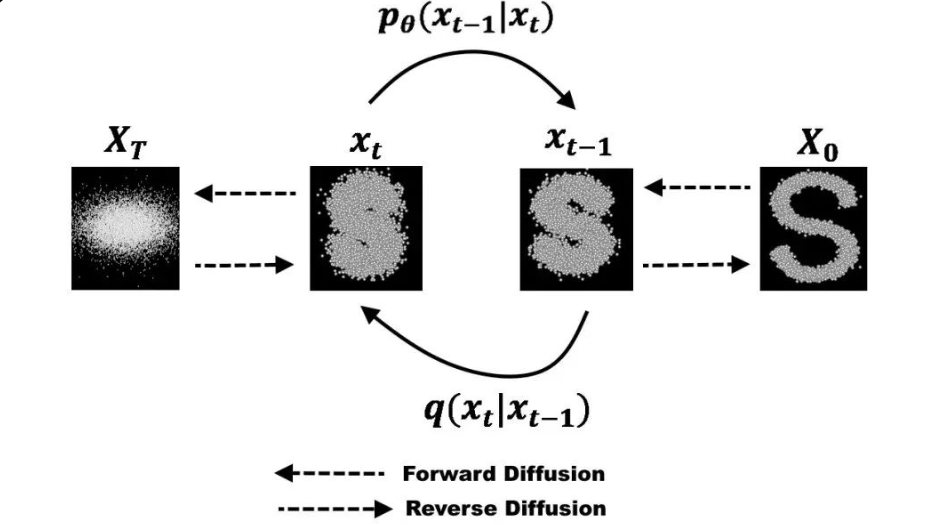
DDPM的本质是将生成建模问题转化为马尔可夫链的逆向过程学习 。通过固定前向扩散过程(向数据逐步添加高斯噪声直到变为纯噪声),并学习一个参数化的反向过程(逐步去除噪声以重建数据)。其数学核心在于变分推断框架 :通过最大化证据下界(ELBO)来逼近真实数据分布的对数似然。关键洞察在于,当反向过程也采用高斯分布时,KL散度具有闭式解,从而将复杂的概率推断问题简化为预测噪声的回归问题。这一简化不仅降低了计算复杂度,更建立了扩散模型与Score-Based生成模型的等价性,为后续的Stable Diffusion等大规模生成模型奠定了理论基础。
三、深度原理解析(The Meat)
3.1 前向扩散过程的数学建模
前向扩散过程是一个固定的马尔可夫链,逐步向数据添加高斯噪声。设原始数据为x0∼q(x0)\mathbf{x}_0 \sim q(\mathbf{x}_0)x0∼q(x0),前向过程定义为:
q(x1:T∣x0)=∏t=1Tq(xt∣xt−1)q(\mathbf{x}_{1:T}|\mathbf{x}0) = \prod{t=1}^{T} q(\mathbf{x}t|\mathbf{x}{t-1})q(x1:T∣x0)=t=1∏Tq(xt∣xt−1)
其中单步转移分布为:
q(xt∣xt−1)=N(xt;1−βtxt−1,βtI)q(\mathbf{x}t|\mathbf{x}{t-1}) = \mathcal{N}(\mathbf{x}t; \sqrt{1-\beta_t}\mathbf{x}{t-1}, \beta_t\mathbf{I})q(xt∣xt−1)=N(xt;1−βt xt−1,βtI)
这里βt∈(0,1)\beta_t \in (0,1)βt∈(0,1)是预定义的噪声调度参数,控制每步添加噪声的强度。
关键性质:任意时间步的直接采样
由于每步添加的噪声是独立的高斯分布,我们可以通过重参数化技巧 直接从x0\mathbf{x}_0x0采样任意时间步的xt\mathbf{x}_txt,而无需递归计算。定义:
αt=1−βt,αˉt=∏s=1tαs\alpha_t = 1 - \beta_t, \quad \bar{\alpha}t = \prod{s=1}^{t} \alpha_sαt=1−βt,αˉt=s=1∏tαs
则有:
q(xt∣x0)=N(xt;αˉtx0,(1−αˉt)I)q(\mathbf{x}_t|\mathbf{x}_0) = \mathcal{N}(\mathbf{x}_t; \sqrt{\bar{\alpha}_t}\mathbf{x}_0, (1-\bar{\alpha}_t)\mathbf{I})q(xt∣x0)=N(xt;αˉt x0,(1−αˉt)I)
重参数化形式为:
xt=αˉtx0+1−αˉtϵ,ϵ∼N(0,I)\mathbf{x}_t = \sqrt{\bar{\alpha}_t}\mathbf{x}_0 + \sqrt{1-\bar{\alpha}_t}\boldsymbol{\epsilon}, \quad \boldsymbol{\epsilon} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})xt=αˉt x0+1−αˉt ϵ,ϵ∼N(0,I)
物理含义 :αˉt\sqrt{\bar{\alpha}_t}αˉt 表示原始信号的保留比例,1−αˉt\sqrt{1-\bar{\alpha}_t}1−αˉt 表示注入噪声的比例。当t→Tt \to Tt→T时,αˉt→0\bar{\alpha}_t \to 0αˉt→0,因此xT→N(0,I)\mathbf{x}_T \to \mathcal{N}(\mathbf{0}, \mathbf{I})xT→N(0,I),即变为纯高斯噪声。
面试官追问 :为何选择βt\beta_tβt线性递增的调度策略?这会对训练过程产生什么影响?
避坑指南 :线性调度(βt\beta_tβt从β1=10−4\beta_1=10^{-4}β1=10−4线性增长到βT=0.02\beta_T=0.02βT=0.02)确保了早期步保留较多信号信息,后期步充分探索噪声空间。若βt\beta_tβt增长过快,会导致早期信息丢失严重;若过慢,则需要更多步数才能达到纯噪声状态。实践中也有采用余弦调度的改进策略。
3.2 反向过程与变分推断框架
反向过程的目标是学习一个参数化的马尔可夫链,从纯噪声xT∼N(0,I)\mathbf{x}_T \sim \mathcal{N}(\mathbf{0}, \mathbf{I})xT∼N(0,I)逐步去噪至真实数据分布:
pθ(x0:T)=p(xT)∏t=1Tpθ(xt−1∣xt)p_\theta(\mathbf{x}{0:T}) = p(\mathbf{x}T) \prod{t=1}^{T} p\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)pθ(x0:T)=p(xT)t=1∏Tpθ(xt−1∣xt)
其中单步反向转移分布假设为高斯分布:
pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))p_\theta(\mathbf{x}{t-1}|\mathbf{x}t) = \mathcal{N}(\mathbf{x}{t-1}; \boldsymbol{\mu}\theta(\mathbf{x}t, t), \boldsymbol{\Sigma}\theta(\mathbf{x}_t, t))pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))
训练目标 :最大化数据的对数似然logpθ(x0)\log p_\theta(\mathbf{x}_0)logpθ(x0)。由于直接计算不可行,通过引入前向过程作为变分后验,利用Jensen不等式构造证据下界(ELBO):
logpθ(x0)≥Eq(x1:T∣x0)logpθ(x0:T)q(x1:T∣x0)=:LVLB \log p_\theta(\mathbf{x}0) \geq \mathbb{E}{q(\mathbf{x}_{1:T}|\mathbf{x}0)} \left \\log \\frac{p_\\theta(\\mathbf{x}_{0:T})}{q(\\mathbf{x}_{1:T}\|\\mathbf{x}_0)} \\right =: \mathcal{L}{\text{VLB}} logpθ(x0)≥Eq(x1:T∣x0)logq(x1:T∣x0)pθ(x0:T)=:LVLB
3.3 ELBO的展开与分解
展开ELBO表达式:
LVLB=Eqlogpθ(xT)+∑t=1Tlogpθ(xt−1∣xt)−∑t=1Tlogq(xt∣xt−1)\mathcal{L}_{\text{VLB}} = \mathbb{E}_q \left \\log p_\\theta(\\mathbf{x}_T) + \\sum_{t=1}\^{T} \\log p_\\theta(\\mathbf{x}_{t-1}\|\\mathbf{x}_t) - \\sum_{t=1}\^{T} \\log q(\\mathbf{x}_t\|\\mathbf{x}_{t-1}) \\rightLVLB=Eqlogpθ(xT)+t=1∑Tlogpθ(xt−1∣xt)−t=1∑Tlogq(xt∣xt−1)
利用马尔可夫性质和条件概率的定义,可以重写为:
LVLB=Eqlogpθ(xT)q(xT∣x0)+∑t=2Tlogpθ(xt−1∣xt)q(xt−1∣xt,x0)+logpθ(x0∣x1)\mathcal{L}_{\text{VLB}} = \mathbb{E}_q \left \\log \\frac{p_\\theta(\\mathbf{x}_T)}{q(\\mathbf{x}_T\|\\mathbf{x}_0)} + \\sum_{t=2}\^{T} \\log \\frac{p_\\theta(\\mathbf{x}_{t-1}\|\\mathbf{x}_t)}{q(\\mathbf{x}_{t-1}\|\\mathbf{x}_t, \\mathbf{x}_0)} + \\log p_\\theta(\\mathbf{x}_0\|\\mathbf{x}_1) \\rightLVLB=Eqlogq(xT∣x0)pθ(xT)+t=2∑Tlogq(xt−1∣xt,x0)pθ(xt−1∣xt)+logpθ(x0∣x1)
识别出KL散度的形式:logpq=−logqp\log \frac{p}{q} = -\log \frac{q}{p}logqp=−logpq,因此:
LVLB=EqDKL(q(xT∣x0)∥p(xT))⏟LT+∑t=2TDKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))⏟Lt−1−logpθ(x0∣x1)⏟L0\mathcal{L}_{\text{VLB}} = \mathbb{E}_q \left \\underbrace{D_{\\text{KL}}(q(\\mathbf{x}_T\|\\mathbf{x}_0) \\\| p(\\mathbf{x}_T))}_{L_T} + \\sum_{t=2}\^{T} \\underbrace{D_{\\text{KL}}(q(\\mathbf{x}_{t-1}\|\\mathbf{x}_t, \\mathbf{x}_0) \\\| p_\\theta(\\mathbf{x}_{t-1}\|\\mathbf{x}_t))}_{L_{t-1}} - \\underbrace{\\log p_\\theta(\\mathbf{x}_0\|\\mathbf{x}_1)}_{L_0} \\rightLVLB=Eq LT DKL(q(xT∣x0)∥p(xT))+t=2∑TLt−1 DKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))−L0 logpθ(x0∣x1)
各项解释:
- LTL_TLT:前向过程最终分布与先验分布的差异,由于两者都是固定的高斯分布,该项为常数,可忽略
- Lt−1L_{t-1}Lt−1(t=2,...,Tt=2,\ldots,Tt=2,...,T):去噪项,衡量真实后验与近似反向过程的差异
- L0L_0L0:重建项,衡量从x1\mathbf{x}_1x1重建x0\mathbf{x}_0x0的质量
3.4 后验分布q(xt−1∣xt,x0)q(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)q(xt−1∣xt,x0)的闭式解
这是DDPM数学推导的关键步骤。利用贝叶斯公式:
q(xt−1∣xt,x0)=q(xt∣xt−1,x0)q(xt−1∣x0)q(xt∣x0)q(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0) = \frac{q(\mathbf{x}t|\mathbf{x}{t-1}, \mathbf{x}0) q(\mathbf{x}{t-1}|\mathbf{x}_0)}{q(\mathbf{x}_t|\mathbf{x}_0)}q(xt−1∣xt,x0)=q(xt∣x0)q(xt∣xt−1,x0)q(xt−1∣x0)
由于马尔可夫性质,q(xt∣xt−1,x0)=q(xt∣xt−1)q(\mathbf{x}t|\mathbf{x}{t-1}, \mathbf{x}_0) = q(\mathbf{x}t|\mathbf{x}{t-1})q(xt∣xt−1,x0)=q(xt∣xt−1)。三个高斯分布的比值仍为高斯分布:
q(xt−1∣xt,x0)=N(xt−1;μ~t(xt,x0),β~tI)q(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}0) = \mathcal{N}(\mathbf{x}{t-1}; \tilde{\boldsymbol{\mu}}_t(\mathbf{x}_t, \mathbf{x}_0), \tilde{\beta}_t\mathbf{I})q(xt−1∣xt,x0)=N(xt−1;μ~t(xt,x0),β~tI)
其中均值和方差为:
μ~t(xt,x0)=αt(1−αˉt−1)1−αˉtxt+αˉt−1βt1−αˉtx0\tilde{\boldsymbol{\mu}}_t(\mathbf{x}_t, \mathbf{x}0) = \frac{\sqrt{\alpha_t}(1-\bar{\alpha}{t-1})}{1-\bar{\alpha}_t}\mathbf{x}t + \frac{\sqrt{\bar{\alpha}{t-1}}\beta_t}{1-\bar{\alpha}_t}\mathbf{x}_0μ~t(xt,x0)=1−αˉtαt (1−αˉt−1)xt+1−αˉtαˉt−1 βtx0
β~t=1−αˉt−11−αˉtβt\tilde{\beta}t = \frac{1-\bar{\alpha}{t-1}}{1-\bar{\alpha}_t}\beta_tβ~t=1−αˉt1−αˉt−1βt
关键洞察 :后验均值是xt\mathbf{x}_txt和x0\mathbf{x}_0x0的线性组合,这意味着如果我们能准确预测x0\mathbf{x}_0x0,就能计算出最优的去噪均值。
3.5 从均值预测到噪声预测的转换
由于x0=xt−1−αˉtϵαˉt\mathbf{x}_0 = \frac{\mathbf{x}_t - \sqrt{1-\bar{\alpha}_t}\boldsymbol{\epsilon}}{\sqrt{\bar{\alpha}_t}}x0=αˉt xt−1−αˉt ϵ,可以将后验均值重写为关于噪声ϵ\boldsymbol{\epsilon}ϵ的函数:
μ~t(xt,x0)=1αt(xt−βt1−αˉtϵ)\tilde{\boldsymbol{\mu}}_t(\mathbf{x}_t, \mathbf{x}_0) = \frac{1}{\sqrt{\alpha_t}} \left( \mathbf{x}_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}_t}}\boldsymbol{\epsilon} \right)μ~t(xt,x0)=αt 1(xt−1−αˉt βtϵ)
现在,我们让神经网络ϵθ(xt,t)\boldsymbol{\epsilon}_\theta(\mathbf{x}t, t)ϵθ(xt,t)来预测噪声ϵ\boldsymbol{\epsilon}ϵ,而非直接预测均值μθ(xt,t)\boldsymbol{\mu}\theta(\mathbf{x}_t, t)μθ(xt,t)。参数化反向过程为:
pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))p_\theta(\mathbf{x}{t-1}|\mathbf{x}t) = \mathcal{N}(\mathbf{x}{t-1}; \boldsymbol{\mu}\theta(\mathbf{x}t, t), \boldsymbol{\Sigma}\theta(\mathbf{x}_t, t))pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),Σθ(xt,t))
其中:
μθ(xt,t)=1αt(xt−βt1−αˉtϵθ(xt,t))\boldsymbol{\mu}_\theta(\mathbf{x}_t, t) = \frac{1}{\sqrt{\alpha_t}} \left( \mathbf{x}_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}t}}\boldsymbol{\epsilon}\theta(\mathbf{x}_t, t) \right)μθ(xt,t)=αt 1(xt−1−αˉt βtϵθ(xt,t))
方差Σθ(xt,t)\boldsymbol{\Sigma}_\theta(\mathbf{x}_t, t)Σθ(xt,t)可以固定为β~tI\tilde{\beta}_t\mathbf{I}β~tI或βtI\beta_t\mathbf{I}βtI(论文实验表明两者性能接近)。
3.6 损失函数的简化
由于两个高斯分布的KL散度有闭式解:
DKL(N(μ1,Σ1)∥N(μ2,Σ2))=12tr(Σ2−1Σ1)+(μ2−μ1)TΣ2−1(μ2−μ1)+log∣Σ2∣∣Σ1∣−dD_{\text{KL}}(\mathcal{N}(\boldsymbol{\mu}_1, \boldsymbol{\Sigma}_1) \| \mathcal{N}(\boldsymbol{\mu}_2, \boldsymbol{\Sigma}_2)) = \frac{1}{2} \left \\text{tr}(\\boldsymbol{\\Sigma}_2\^{-1}\\boldsymbol{\\Sigma}_1) + (\\boldsymbol{\\mu}_2 - \\boldsymbol{\\mu}_1)\^T \\boldsymbol{\\Sigma}_2\^{-1}(\\boldsymbol{\\mu}_2 - \\boldsymbol{\\mu}_1) + \\log \\frac{\|\\boldsymbol{\\Sigma}_2\|}{\|\\boldsymbol{\\Sigma}_1\|} - d \\rightDKL(N(μ1,Σ1)∥N(μ2,Σ2))=21tr(Σ2−1Σ1)+(μ2−μ1)TΣ2−1(μ2−μ1)+log∣Σ1∣∣Σ2∣−d
当协方差矩阵相等时,简化为:
DKL=12σ2∥μ1−μ2∥2D_{\text{KL}} = \frac{1}{2\sigma^2} \|\boldsymbol{\mu}_1 - \boldsymbol{\mu}_2\|^2DKL=2σ21∥μ1−μ2∥2
应用于DDPM的去噪项:
Lt−1=Eq12β\~t∥μθ(xt,t)−μ\~t(xt,x0)∥2+CL_{t-1} = \mathbb{E}_q \left \\frac{1}{2\\tilde{\\beta}_t} \\\|\\boldsymbol{\\mu}_\\theta(\\mathbf{x}_t, t) - \\tilde{\\boldsymbol{\\mu}}_t(\\mathbf{x}_t, \\mathbf{x}_0)\\\|\^2 \\right + CLt−1=Eq2β\~t1∥μθ(xt,t)−μ\~t(xt,x0)∥2+C
代入均值表达式并消去常数项后:
Lt−1=Ex0,ϵ,tβt22β\~tαt(1−αˉt)∥ϵ−ϵθ(xt,t)∥2L_{t-1} = \mathbb{E}_{\mathbf{x}_0, \boldsymbol{\epsilon}, t} \left \\frac{\\beta_t\^2}{2\\tilde{\\beta}_t\\alpha_t(1-\\bar{\\alpha}_t)} \\\|\\boldsymbol{\\epsilon} - \\boldsymbol{\\epsilon}_\\theta(\\mathbf{x}_t, t)\\\|\^2 \\rightLt−1=Ex0,ϵ,t2β\~tαt(1−αˉt)βt2∥ϵ−ϵθ(xt,t)∥2
其中xt=αˉtx0+1−αˉtϵ\mathbf{x}_t = \sqrt{\bar{\alpha}_t}\mathbf{x}_0 + \sqrt{1-\bar{\alpha}_t}\boldsymbol{\epsilon}xt=αˉt x0+1−αˉt ϵ。
Ho et al. (2020)的关键简化 :忽略权重项βt22β~tαt(1−αˉt)\frac{\beta_t^2}{2\tilde{\beta}_t\alpha_t(1-\bar{\alpha}_t)}2β~tαt(1−αˉt)βt2,直接使用均方误差:
Lsimple=Et,x0,ϵ∥ϵ−ϵθ(αˉtx0+1−αˉtϵ,t)∥2\mathcal{L}{\text{simple}} = \mathbb{E}{t, \mathbf{x}_0, \boldsymbol{\epsilon}} \left \\\|\\boldsymbol{\\epsilon} - \\boldsymbol{\\epsilon}_\\theta(\\sqrt{\\bar{\\alpha}_t}\\mathbf{x}_0 + \\sqrt{1-\\bar{\\alpha}_t}\\boldsymbol{\\epsilon}, t)\\\|\^2 \\rightLsimple=Et,x0,ϵ∥ϵ−ϵθ(αˉt x0+1−αˉt ϵ,t)∥2
其中t∼U(1,T)t \sim \mathcal{U}(1, T)t∼U(1,T)。
面试官追问:为何可以忽略权重项?这对训练过程有什么影响?
避坑指南:忽略权重项在理论上是次优的,但在实践中效果更好。原因在于:权重项在早期噪声水平高时给予的权重较小,而实际上早期步的去噪对最终生成质量至关重要。简化后的目标相当于对噪声水平进行了加权,更强调高噪声水平的步数。实验表明,这种加权策略能产生更高质量的样本。
3.7 与Score-Based模型的等价性
扩散模型与Score-Based生成模型存在深刻的理论联系。回顾Score Matching的目标:
Eqt(xt)∥∇xtlogqt(xt)−sθ(xt,t)∥2\mathbb{E}_{q_t(\mathbf{x}_t)} \left \\\| \\nabla_{\\mathbf{x}_t} \\log q_t(\\mathbf{x}_t) - \\mathbf{s}_\\theta(\\mathbf{x}_t, t) \\\|\^2 \\rightEqt(xt)∥∇xtlogqt(xt)−sθ(xt,t)∥2
其中sθ(xt,t)\mathbf{s}_\theta(\mathbf{x}t, t)sθ(xt,t)是神经网络,用于估计分数函数∇xtlogqt(xt)\nabla{\mathbf{x}_t} \log q_t(\mathbf{x}_t)∇xtlogqt(xt)。
通过推导可以证明,当sθ(xt,t)=−11−αˉtϵθ(xt,t)\mathbf{s}_\theta(\mathbf{x}_t, t) = -\frac{1}{\sqrt{1-\bar{\alpha}t}}\boldsymbol{\epsilon}\theta(\mathbf{x}_t, t)sθ(xt,t)=−1−αˉt 1ϵθ(xt,t)时,DDPM的简化损失与Score Matching目标等价:
∥ϵ−ϵθ(xt,t)∥2∝∥∇xtlogqt(xt)+11−αˉtϵθ(xt,t)∥2\|\boldsymbol{\epsilon} - \boldsymbol{\epsilon}_\theta(\mathbf{x}t, t)\|^2 \propto \| \nabla{\mathbf{x}_t} \log q_t(\mathbf{x}_t) + \frac{1}{\sqrt{1-\bar{\alpha}t}}\boldsymbol{\epsilon}\theta(\mathbf{x}_t, t) \|^2∥ϵ−ϵθ(xt,t)∥2∝∥∇xtlogqt(xt)+1−αˉt 1ϵθ(xt,t)∥2
几何含义 :分数函数∇xtlogqt(xt)\nabla_{\mathbf{x}_t} \log q_t(\mathbf{x}_t)∇xtlogqt(xt)指向数据密度增长最快的方向。通过学习预测噪声,实际上是在学习估计分数函数,从而指导随机过程(如Langevin动力学)从噪声分布采样至数据分布。
面试官追问:DDPM、DDIM和Score-Based模型在采样策略上有什么本质区别?
避坑指南:DDPM采用随机采样策略,每步添加新的随机噪声,对应于随机微分方程(SDE)的离散化;DDIM(Denoising Diffusion Implicit Models)采用确定性采样,不添加新噪声,对应于常微分方程(ODE)的离散化,采样速度更快;Score-Based模型通常使用Langevin动力学进行采样。三种方法在连续时间极限下可以统一到同一个随机微分方程框架下。
四、代码手撕环节(Live Coding)
4.1 核心训练代码实现
以下提供符合工业界规范的DDPM核心实现:
python
import torch
import torch.nn as nn
import torch.nn.functional as F
from typing import Optional, Tuple
class GaussianDiffusion:
"""
DDPM的高斯扩散过程实现
核心功能:
1. 定义噪声调度(beta schedule)
2. 计算前向过程和反向过程的分布参数
3. 计算简化的训练损失
4. 实现采样过程
"""
def __init__(
self,
num_timesteps: int = 1000,
beta_start: float = 0.0001,
beta_end: float = 0.02,
device: str = 'cuda'
):
self.num_timesteps = num_timesteps
self.device = device
# 定义beta schedule(线性调度)
self.betas = torch.linspace(beta_start, beta_end, num_timesteps, device=device)
# 计算alpha和alpha_bar
self.alphas = 1.0 - self.betas
self.alphas_cumprod = torch.cumprod(self.alphas, dim=0)
self.alphas_cumprod_prev = F.pad(self.alphas_cumprod[:-1], (1, 0), value=1.0)
# 计算采样过程中的关键参数
self.sqrt_alphas_cumprod = torch.sqrt(self.alphas_cumprod)
self.sqrt_one_minus_alphas_cumprod = torch.sqrt(1.0 - self.alphas_cumprod)
# 后验方差(用于反向过程)
self.posterior_variance = (
self.betas * (1.0 - self.alphas_cumprod_prev) / (1.0 - self.alphas_cumprod)
)
# 计算后验均值系数
self.posterior_mean_coef1 = self.betas * torch.sqrt(self.alphas_cumprod_prev) / (1.0 - self.alphas_cumprod)
self.posterior_mean_coef2 = (1.0 - self.alphas_cumprod_prev) * torch.sqrt(self.alphas) / (1.0 - self.alphas_cumprod)
def q_sample(
self,
x_start: torch.Tensor,
t: torch.Tensor,
noise: Optional[torch.Tensor] = None
) -> torch.Tensor:
"""
前向过程:从x_0采样x_t
公式:x_t = sqrt(alpha_bar_t) * x_0 + sqrt(1 - alpha_bar_t) * epsilon
"""
if noise is None:
noise = torch.randn_like(x_start)
sqrt_alphas_cumprod_t = self._extract(self.sqrt_alphas_cumprod, t, x_start.shape)
sqrt_one_minus_alphas_cumprod_t = self._extract(
self.sqrt_one_minus_alphas_cumprod, t, x_start.shape
)
return sqrt_alphas_cumprod_t * x_start + sqrt_one_minus_alphas_cumprod_t * noise
def p_losses(
self,
denoise_model: nn.Module,
x_start: torch.Tensor,
t: torch.Tensor,
noise: Optional[torch.Tensor] = None,
loss_type: str = "mse"
) -> torch.Tensor:
"""
计算简化训练损失
公式:L_simple = E[||epsilon - epsilon_theta(x_t, t)||^2]
"""
if noise is None:
noise = torch.randn_like(x_start)
# 前向过程:采样x_t
x_t = self.q_sample(x_start, t, noise)
# 神经网络预测噪声
predicted_noise = denoise_model(x_t, t)
# 计算损失
if loss_type == "mse":
loss = F.mse_loss(predicted_noise, noise)
elif loss_type == "l1":
loss = F.l1_loss(predicted_noise, noise)
else:
raise NotImplementedError(f"Unknown loss type: {loss_type}")
return loss
def p_mean_variance(
self,
denoise_model: nn.Module,
x_t: torch.Tensor,
t: torch.Tensor
) -> Tuple[torch.Tensor, torch.Tensor]:
"""
计算反向过程p(x_{t-1}|x_t)的均值和方差
"""
# 预测噪声
predicted_noise = denoise_model(x_t, t)
# 计算均值
alpha_t = self._extract(self.alphas, t, x_t.shape)
alpha_bar_t = self._extract(self.alphas_cumprod, t, x_t.shape)
beta_t = self._extract(self.betas, t, x_t.shape)
sqrt_one_minus_alpha_bar_t = self._extract(self.sqrt_one_minus_alphas_cumprod, t, x_t.shape)
# 公式:mu_theta = (x_t - beta_t/sqrt(1-alpha_bar_t) * epsilon_theta) / sqrt(alpha_t)
mean = (x_t - beta_t / sqrt_one_minus_alpha_bar_t * predicted_noise) / torch.sqrt(alpha_t)
# 计算方差(使用后验方差)
variance = self._extract(self.posterior_variance, t, x_t.shape)
return mean, variance
def p_sample(
self,
denoise_model: nn.Module,
x_t: torch.Tensor,
t: torch.Tensor
) -> torch.Tensor:
"""
单步反向采样:从x_t采样x_{t-1}
"""
mean, variance = self.p_mean_variance(denoise_model, x_t, t)
noise = torch.randn_like(x_t)
# 当t=0时,不添加噪声
nonzero_mask = ((t != 0).float().view(-1, *([1] * (len(x_t.shape) - 1))))
return mean + nonzero_mask * torch.sqrt(variance) * noise
def p_sample_loop(
self,
denoise_model: nn.Module,
shape: Tuple[int, ...]
) -> torch.Tensor:
"""
完整采样循环:从x_T采样到x_0
"""
# 从纯噪声开始
x_t = torch.randn(shape, device=self.device)
for i in reversed(range(self.num_timesteps)):
t = torch.full((shape[0],), i, device=self.device, dtype=torch.long)
x_t = self.p_sample(denoise_model, x_t, t)
return x_t
@staticmethod
def _extract(
a: torch.Tensor,
t: torch.Tensor,
x_shape: Tuple[int, ...]
) -> torch.Tensor:
"""
从调度中提取特定时间步的参数,并广播到输入形状
"""
batch_size = t.shape[0]
out = a.gather(-1, t)
return out.reshape(batch_size, *((1,) * (len(x_shape) - 1)))
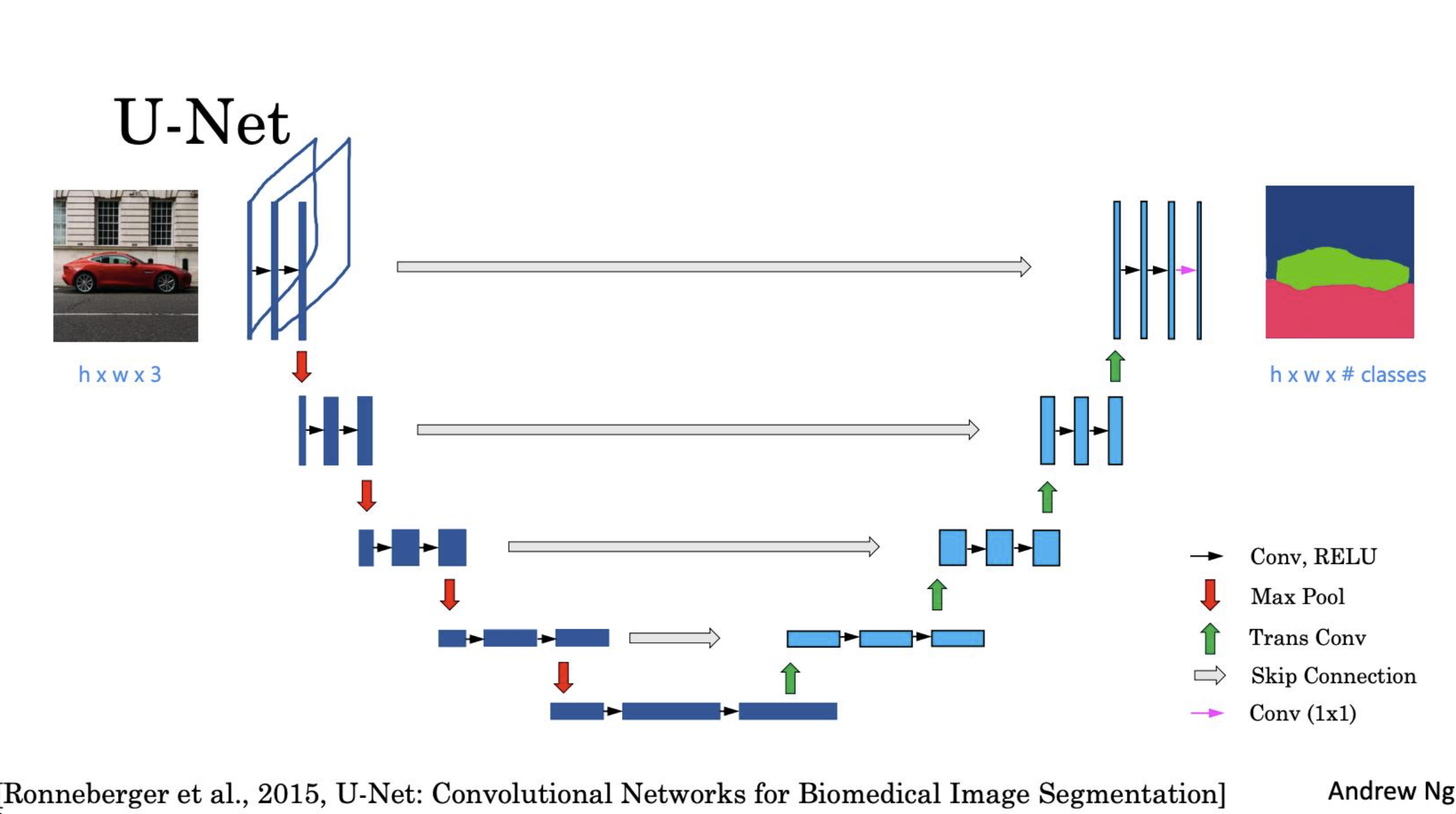
# 简化的UNet骨干网络(用于演示)
class SimpleUNet(nn.Module):
"""
简化的UNet实现,用于噪声预测
实际工程中应使用更复杂的架构(如ResNet块、注意力机制等)
"""
def __init__(
self,
in_channels: int = 3,
model_channels: int = 128,
num_res_blocks: int = 2,
attention_resolutions: Tuple[int, ...] = (16,),
dropout: float = 0.0
):
super().__init__()
self.in_channels = in_channels
self.model_channels = model_channels
# 时间嵌入层
self.time_embed = nn.Sequential(
nn.Linear(128, model_channels),
nn.SiLU(),
nn.Linear(model_channels, model_channels)
)
# 输入卷积层
self.input_blocks = nn.ModuleList([
nn.Conv2d(in_channels, model_channels, kernel_size=3, padding=1)
])
# 残差块和注意力层(简化实现)
self.middle_block = self._make_res_block(model_channels, dropout)
# 输出层
self.output_blocks = nn.ModuleList([
nn.Conv2d(model_channels, in_channels, kernel_size=3, padding=1)
])
def _make_res_block(
self,
channels: int,
dropout: float
) -> nn.Module:
return nn.Sequential(
nn.GroupNorm(32, channels),
nn.SiLU(),
nn.Conv2d(channels, channels, kernel_size=3, padding=1),
nn.GroupNorm(32, channels),
nn.SiLU(),
nn.Dropout(dropout),
nn.Conv2d(channels, channels, kernel_size=3, padding=1)
)
def timestep_embedding(self, timesteps: torch.Tensor, dim: int = 128) -> torch.Tensor:
"""
正弦位置编码,用于编码时间步信息
"""
half = dim // 2
freqs = torch.exp(
-math.log(10000) * torch.arange(half, dtype=torch.float32) / half
).to(device=timesteps.device)
args = timesteps[:, None].float() * freqs[None]
embedding = torch.cat([torch.cos(args), torch.sin(args)], dim=-1)
if dim % 2:
embedding = torch.cat([embedding, torch.zeros_like(embedding[:, :1])], dim=-1)
return embedding
def forward(self, x: torch.Tensor, timesteps: torch.Tensor) -> torch.Tensor:
"""
前向传播:输入x_t和时间步t,输出预测的噪声
"""
# 时间嵌入
emb = self.timestep_embedding(timesteps)
emb = self.time_embed(emb)
# 输入处理
h = self.input_blocks[0](x)
# 中间处理(简化)
h = self.middle_block(h)
# 输出
return self.output_blocks[0](h)
# 训练循环示例
def train_diffusion_model(
denoise_model: nn.Module,
diffusion: GaussianDiffusion,
dataloader: torch.utils.data.DataLoader,
num_epochs: int = 100,
lr: float = 1e-4,
device: str = 'cuda'
):
"""
DDPM模型的训练循环
"""
denoise_model = denoise_model.to(device)
optimizer = torch.optim.AdamW(denoise_model.parameters(), lr=lr)
for epoch in range(num_epochs):
for batch_idx, (images, _) in enumerate(dataloader):
images = images.to(device) # 假设images在[-1, 1]范围
batch_size = images.shape[0]
# 随机采样时间步
t = torch.randint(0, diffusion.num_timesteps, (batch_size,), device=device)
# 计算损失
loss = diffusion.p_losses(denoise_model, images, t)
# 反向传播和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
if batch_idx % 100 == 0:
print(f"Epoch {epoch}, Batch {batch_idx}, Loss: {loss.item():.4f}")
# 定期采样可视化
if (epoch + 1) % 10 == 0:
with torch.no_grad():
samples = diffusion.p_sample_loop(denoise_model, (16, 3, 32, 32))
# 保存或显示样本(略)
print(f"Epoch {epoch + 1}: Generated samples")
return denoise_model4.2 关键实现细节解析
1. 时间嵌入(Time Embedding)
python
def timestep_embedding(self, timesteps: torch.Tensor, dim: int = 128) -> torch.Tensor:
half = dim // 2
freqs = torch.exp(-math.log(10000) * torch.arange(half) / half)
args = timesteps[:, None].float() * freqs[None]
embedding = torch.cat([torch.cos(args), torch.sin(args)], dim=-1)
return embedding这是Transformer风格的正弦位置编码,用于编码时间步信息。其优势在于:
- 无需学习参数,避免过拟合
- 具有良好的外推性能
- 相对位置关系保持不变
2. EMA(Exponential Moving Average)
在实际工业实现中,通常会维护模型参数的EMA版本:
python
def update_ema(ema_model, model, decay=0.9999):
with torch.no_grad():
for ema_param, param in zip(ema_model.parameters(), model.parameters()):
ema_param.data.mul_(decay).add_(param.data, alpha=1 - decay)EMA版本在推理时表现更稳定,是标准做法。
3. 混合精度训练
为加速训练和节省显存,常用混合精度训练:
python
scaler = torch.cuda.amp.GradScaler()
with torch.cuda.amp.autocast():
loss = diffusion.p_losses(denoise_model, images, t)
scaler.scale(loss).backward()
scaler.step(optimizer)
scaler.update()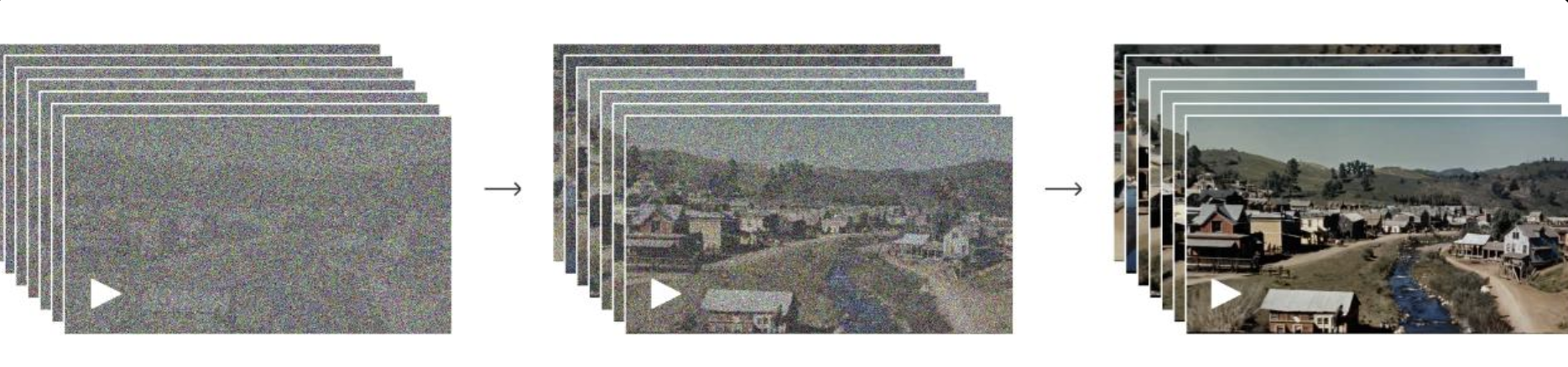
五、进阶追问与展望
5.1 常见面试追问
追问1:DDPM与传统生成模型(如GAN、VAE)的本质区别是什么?
回答要点:
- GAN:通过对抗训练学习从噪声到数据的映射,存在模式崩溃(mode collapse)问题,训练不稳定。
- VAE:通过变分推断学习数据的隐变量分布,生成质量受限于近似后验的表达能力。
- DDPM :通过逐步去噪的马尔可夫链生成样本,训练稳定,能覆盖完整的模态,但采样速度较慢。数学上,DDPM与VAE有相似之处(都使用ELBO),但DDPM的隐变量是所有中间状态x1:T\mathbf{x}_{1:T}x1:T,而非单一隐变量。
追问2:如何加速DDPM的采样过程?有哪些SOTA方法?
回答要点:
- DDIM:确定性采样,减少采样步数至50-100步,质量损失较小。
- Progressive Distillation:知识蒸馏,将多步教师模型压缩为少步学生模型。
- Consistency Distillation:一致性蒸馏,保证不同采样步的输出一致。
- Trajectory Segmented Consistency Distillation (TSCD):分段一致性蒸馏(Hyper-SD方法),在1-8步内达到SOTA性能。
- Score Distillation Sampling (SDS):在潜空间进行蒸馏,提升采样效率。
追问3:DDPM在多模态生成中的应用(如Stable Diffusion)的关键设计是什么?
回答要点:
- Latent Diffusion:在VAE的潜空间进行扩散,大幅降低计算复杂度。
- Cross-Attention:通过交叉注意力机制注入条件信息(如文本、图像、深度图)。
- ControlNet:添加额外的控制网络,实现精细控制(如边缘、姿态控制)。
- LoRA(Low-Rank Adaptation):轻量级适配器,实现高效的风格迁移和个性化微调。
5.2 最新SOTA改进方向
1. 采样加速
- E2EDiff:端到端训练框架,直接优化最终重建质量,消除训练-采样差距。
- Trajectory Refinement:轨迹精炼,通过线性外推拟合误差,修正采样轨迹。
2. 质量提升
- Human Feedback Learning:引入人类反馈,优化低步数场景下的生成质量。
- Reflectance-Aware Trajectory Refinement (RATR):反射感知轨迹精炼,适用于低光图像增强等特定任务。
3. 泛化能力
- Generalized Diffusion Adaptation (GDA): generalized框架,增强对分布偏移的鲁棒性。
- Effective Conditioning:改进条件注入机制,如ECoDepth使用ViT嵌入增强单目深度估计。
5.3 理论前沿
1. 确定性扩散(Diffusion with Deterministic Policy)
探索确定性采样策略,避免随机噪声引入的不确定性,提升生成可控性。
2. 连续时间扩散模型(Continuous-time Diffusion)
在连续时间框架下研究扩散过程,利用随机微分方程(SDE)和常微分方程(ODE)的等价性,提供更灵活的采样策略。
3. 扩散模型与其他生成模型的统一
探索扩散模型与能量模型(EBM)、流模型之间的理论联系,建立统一的生成模型框架。
六、总结与启示
DDPM的成功并非偶然,其数学严谨性与工程可行性达到了完美的平衡。从变分推断的理论框架到噪声预测的工程简化,每一步都有清晰的数学动机和直观的几何解释。
核心方法论:
- 问题转化:将生成问题转化为去噪问题
- 框架选择:利用变分推断的ELBO框架
- 参数化策略:通过噪声预测简化优化目标
- 架构设计:U-Net结合时间嵌入,捕获多尺度特征和时间信息
面试准备建议:
- 熟练掌握前向和反向过程的数学推导
- 理解ELBO分解和损失函数简化的原因
- 掌握噪声预测与分数估计的联系
- 了解SOTA加速方法和改进方向
- 能够手写核心训练和采样代码
DDPM不仅是当前生成式AI的核心技术,更是理解多模态大模型、计算成像等领域的基础。深入掌握其数学原理和实现细节,将为面试官展示扎实的理论基础和工程能力。
参考文献:
- Ho, J., Jain, A., & Abbeel, P. (2020). Denoising Diffusion Probabilistic Models.
- Song, Y., & Ermon, S. (2019). Generative Modeling by Estimating Gradients of the Data Distribution.
- Song, J., Meng, C., & Ermon, S. (2020). Denoising Diffusion Implicit Models.
- Salimans, T., & Ho, J. (2022). Progressive Distillation for Fast Sampling of Diffusion Models.
- Karras, T., et al. (2022). Elucidating the Design Space of Diffusion-Based Generative Models.
附录:关键公式速查表
公式名称 表达式 说明 单步前向转移 q(xt∣xt−1)=N(xt;1−βtxt−1,βtI)q(\mathbf{x}t|\mathbf{x}{t-1}) = \mathcal{N}(\mathbf{x}t; \sqrt{1-\beta_t}\mathbf{x}{t-1}, \beta_t\mathbf{I})q(xt∣xt−1)=N(xt;1−βt xt−1,βtI) 添加高斯噪声 任意步前向采样 xt=αˉtx0+1−αˉtϵ\mathbf{x}_t = \sqrt{\bar{\alpha}_t}\mathbf{x}_0 + \sqrt{1-\bar{\alpha}_t}\boldsymbol{\epsilon}xt=αˉt x0+1−αˉt ϵ 重参数化技巧 后验均值 μ~t=1αt(xt−βt1−αˉtϵ)\tilde{\boldsymbol{\mu}}_t = \frac{1}{\sqrt{\alpha_t}}(\mathbf{x}_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}_t}}\boldsymbol{\epsilon})μ~t=αt 1(xt−1−αˉt βtϵ) 最优去噪方向 网络预测均值 μθ=1αt(xt−βt1−αˉtϵθ)\boldsymbol{\mu}_\theta = \frac{1}{\sqrt{\alpha_t}}(\mathbf{x}_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}t}}\boldsymbol{\epsilon}\theta)μθ=αt 1(xt−1−αˉt βtϵθ) 参数化反向过程 简化损失 Lsimple=E∣ϵ−ϵθ(xt,t)∣2\mathcal{L}_{\text{simple}} = \mathbb{E}\left|\\boldsymbol{\\epsilon} - \\boldsymbol{\\epsilon}_\\theta(\\mathbf{x}_t, t)|\^2\\rightLsimple=E∣ϵ−ϵθ(xt,t)∣2 实际训练目标