第四篇:核心逻辑篇------车库门开关控制与停止逻辑实现
在上一篇掌握 FBD 基础操作后,本文将聚焦车库门的核心控制逻辑:开门、关门的切换控制,以及手动停止、位置停止、过载停止的保护逻辑。这部分是整个项目的核心,我们将通过"网络分段"的方式,逐一实现每个逻辑功能。
一、核心思路:基于 RS 功能块的闭锁控制
车库门的开关控制需要实现"触发后保持动作,直到达到终点或触发停止",这种逻辑适合用 RS 功能块(置位-复位)实现。核心原理:通过控制按钮的上升沿置位 RS 功能块,使升门/降门驱动信号保持为真;通过位置传感器、过载传感器或手动停止信号复位 RS 功能块,使驱动信号变为假,停止动作。
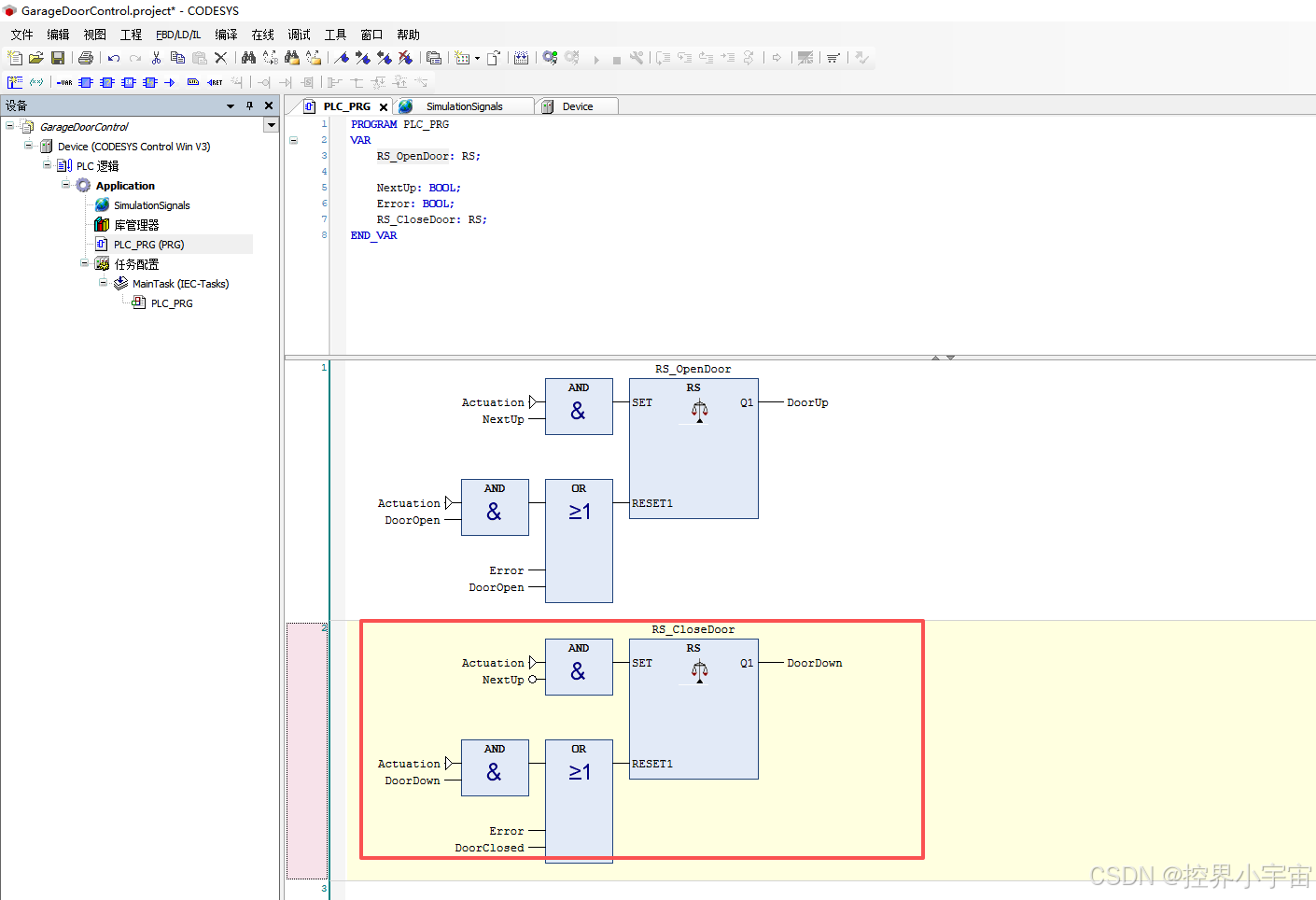
二、网络 1:开门控制逻辑
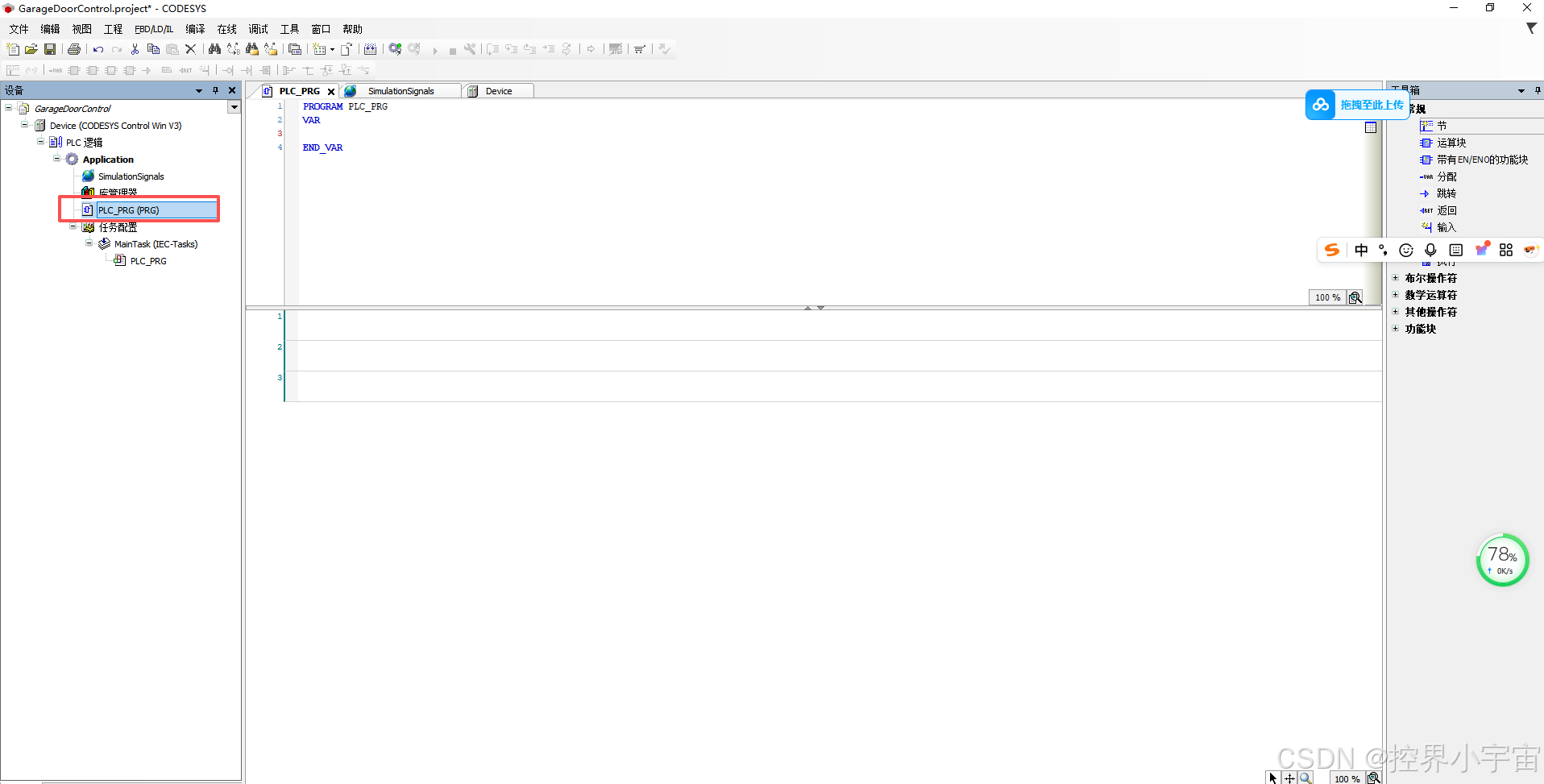
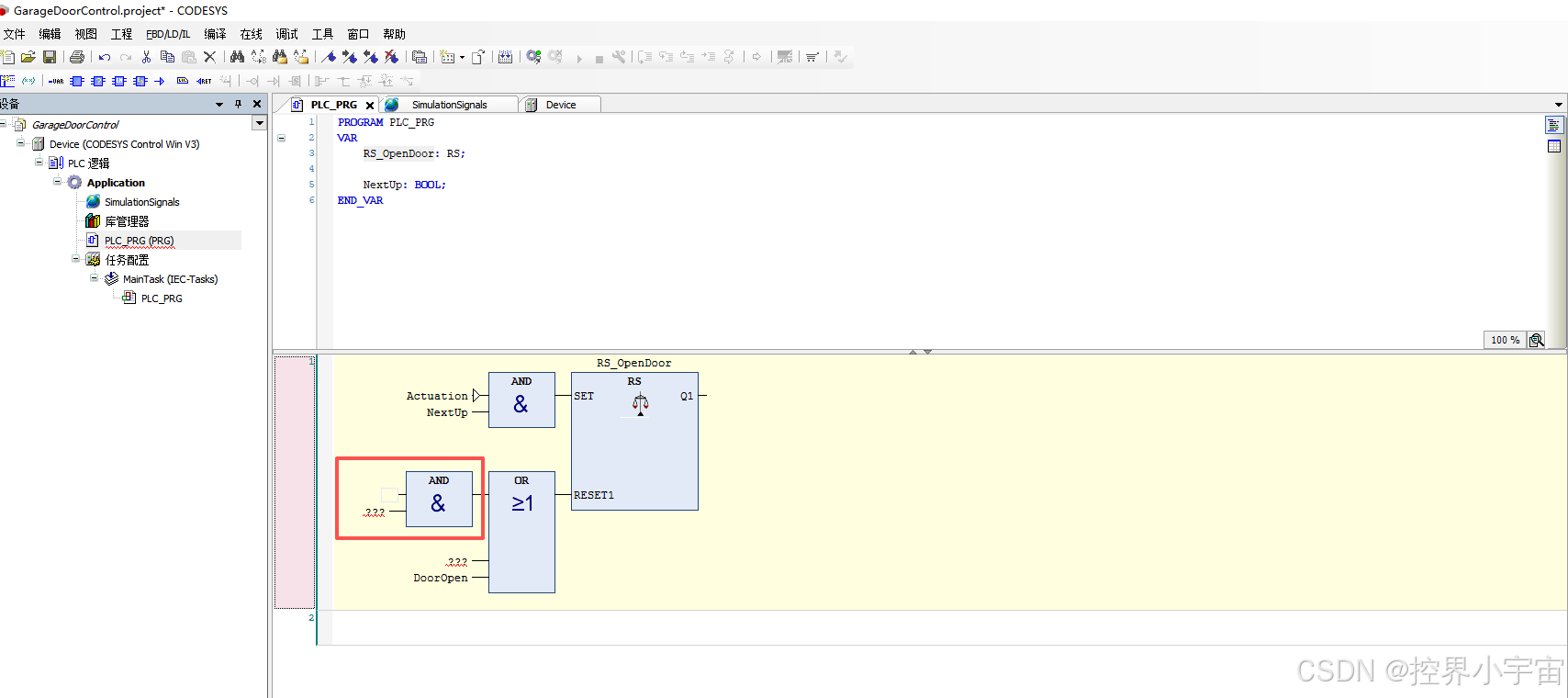
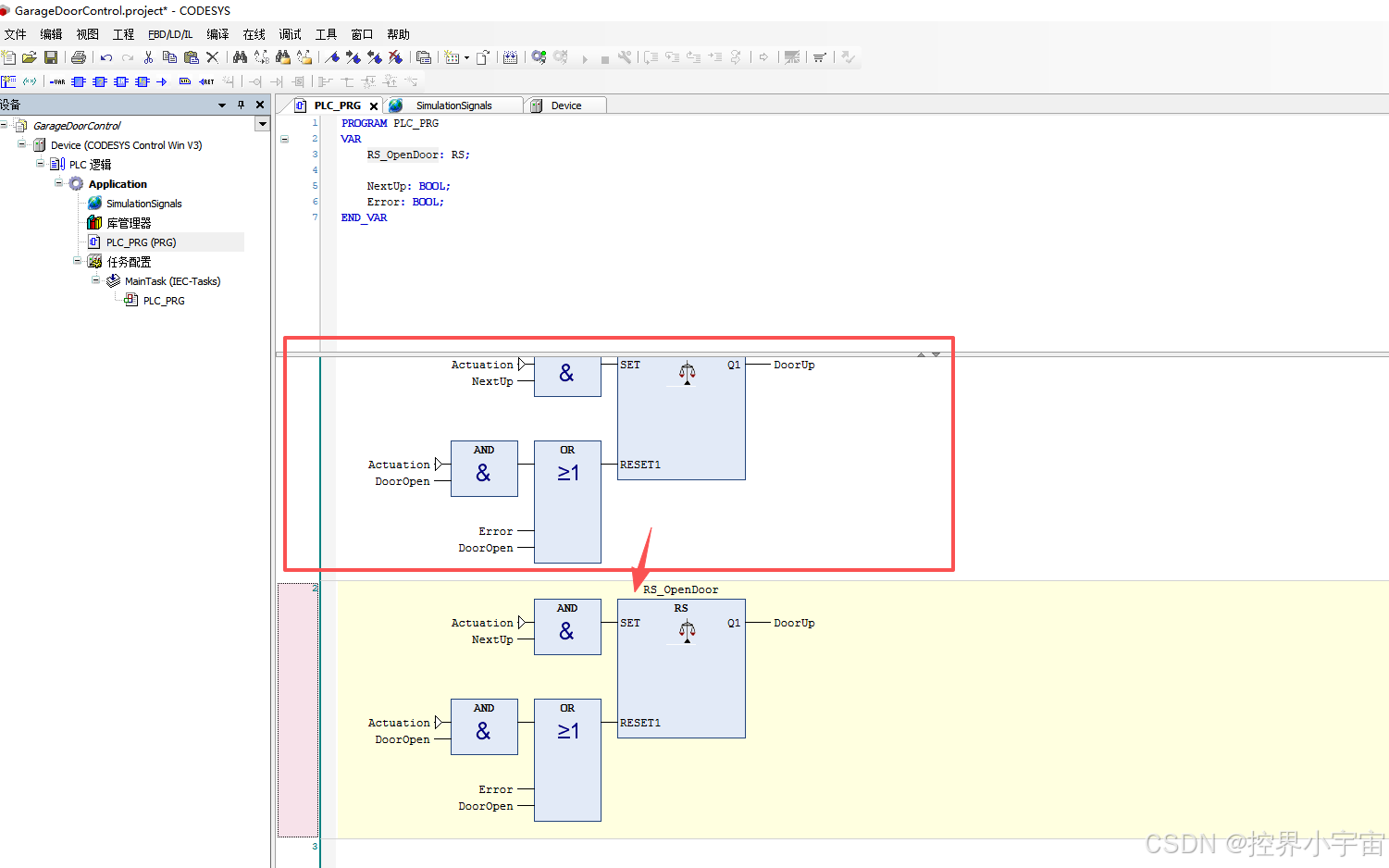
双击对象树中的"PLC_PRG",打开 FBD 编辑器,开始编写第一个网络(开门控制):
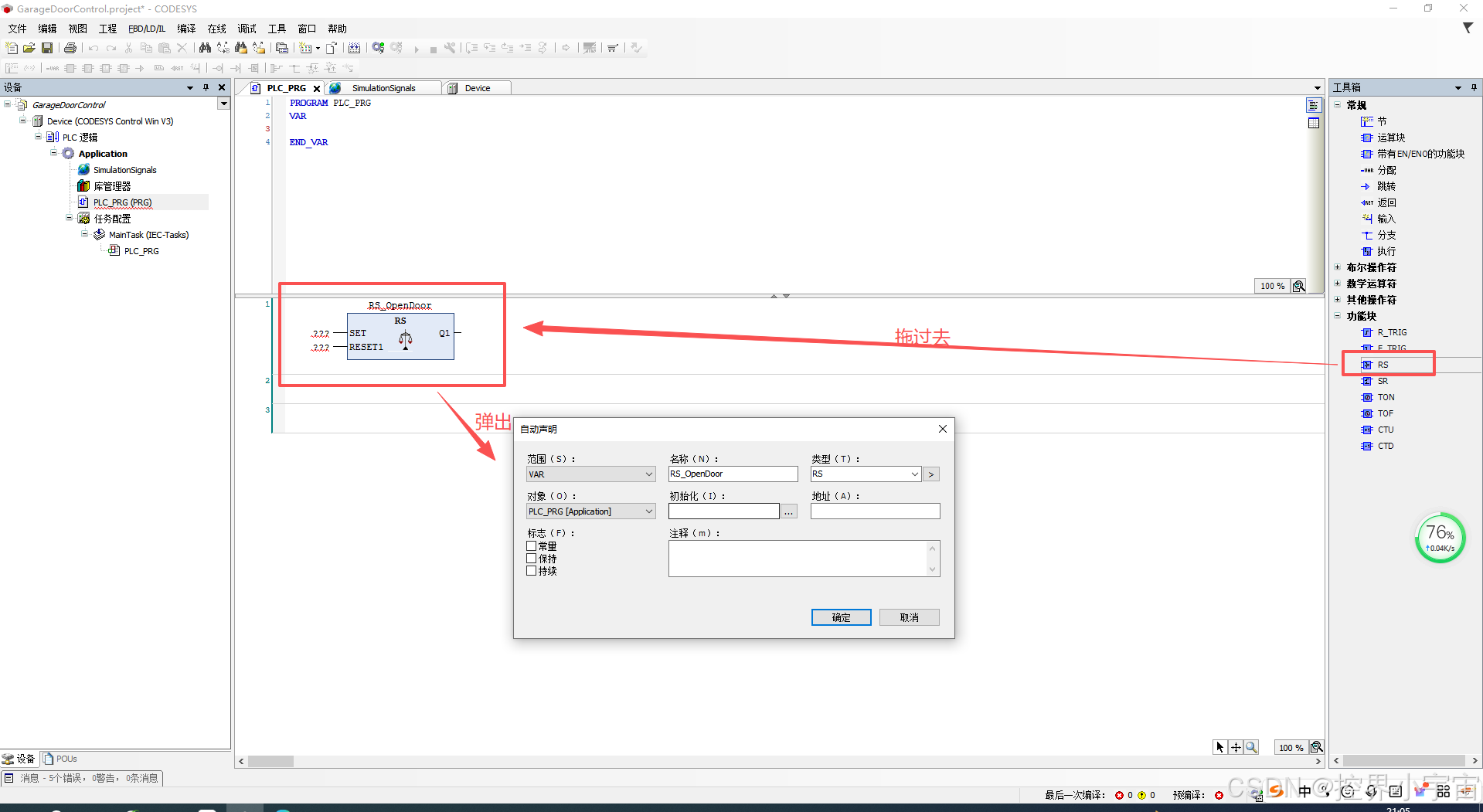
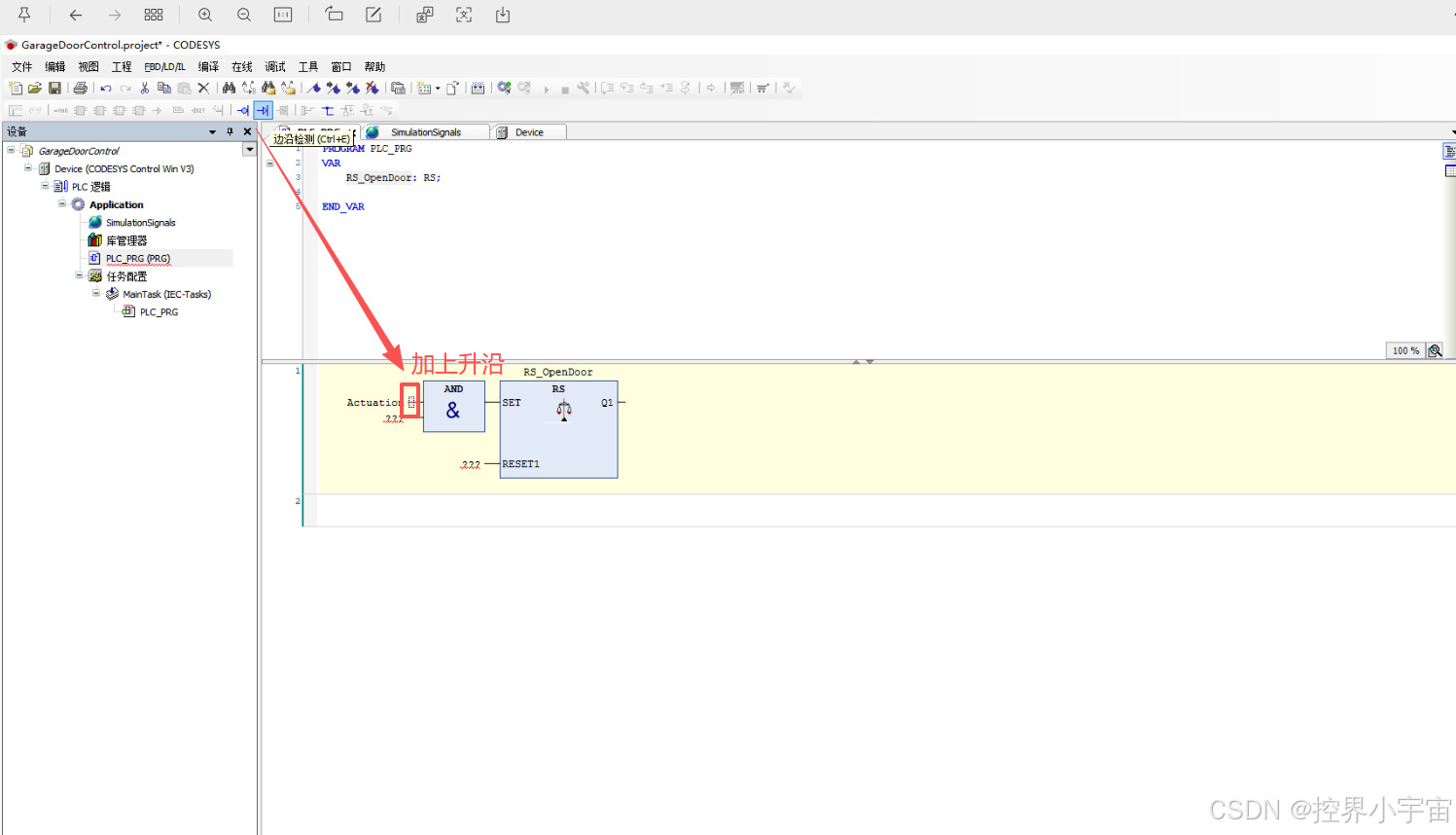
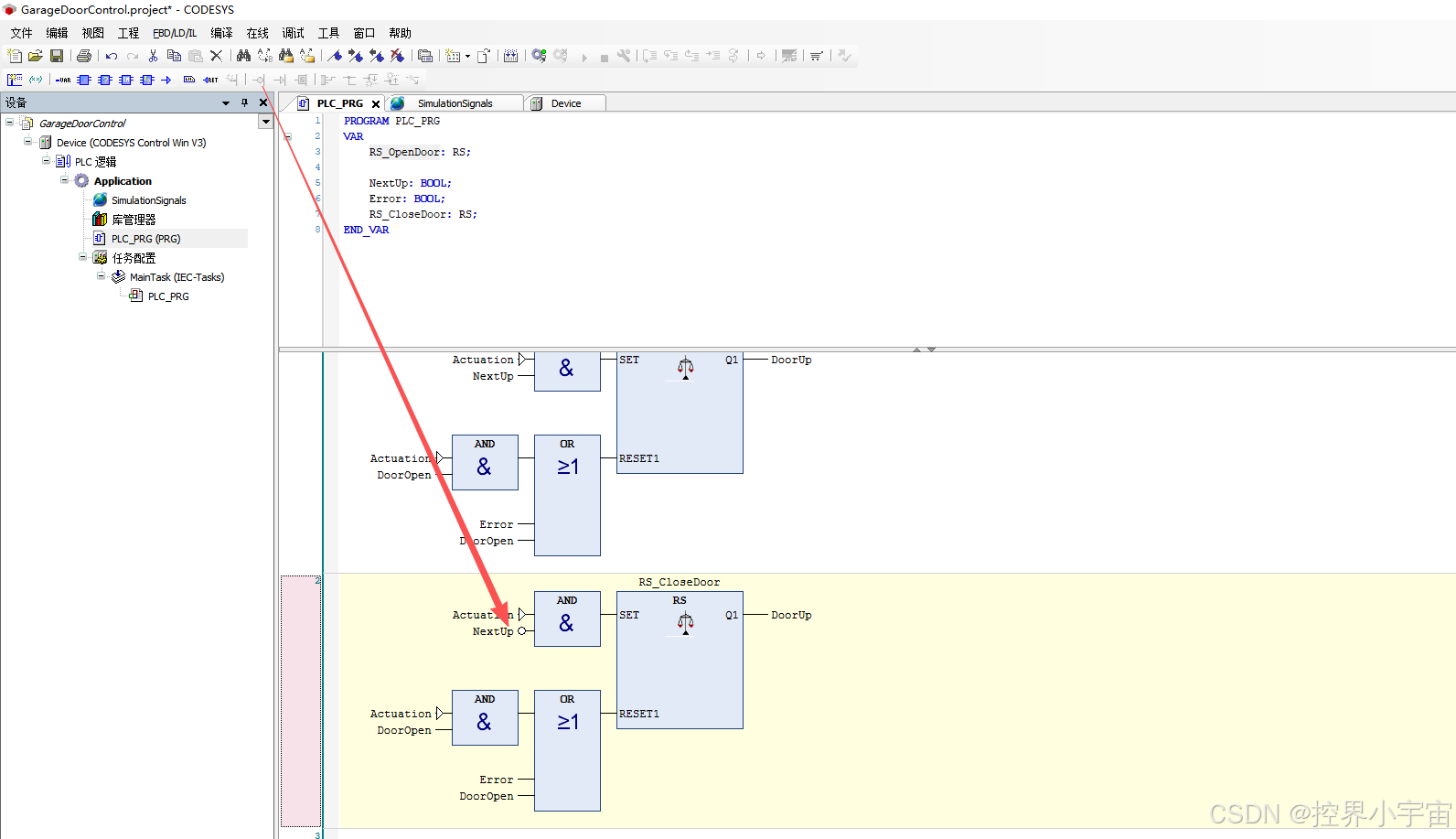
- 添加 RS 功能块:从工具箱拖拽 RS 功能块到编辑器,实例名设为"RS_OpenDoor",完成自动声明。
- 置位端(S)逻辑:实现"按下控制按钮且门可开门"时触发开门动作。
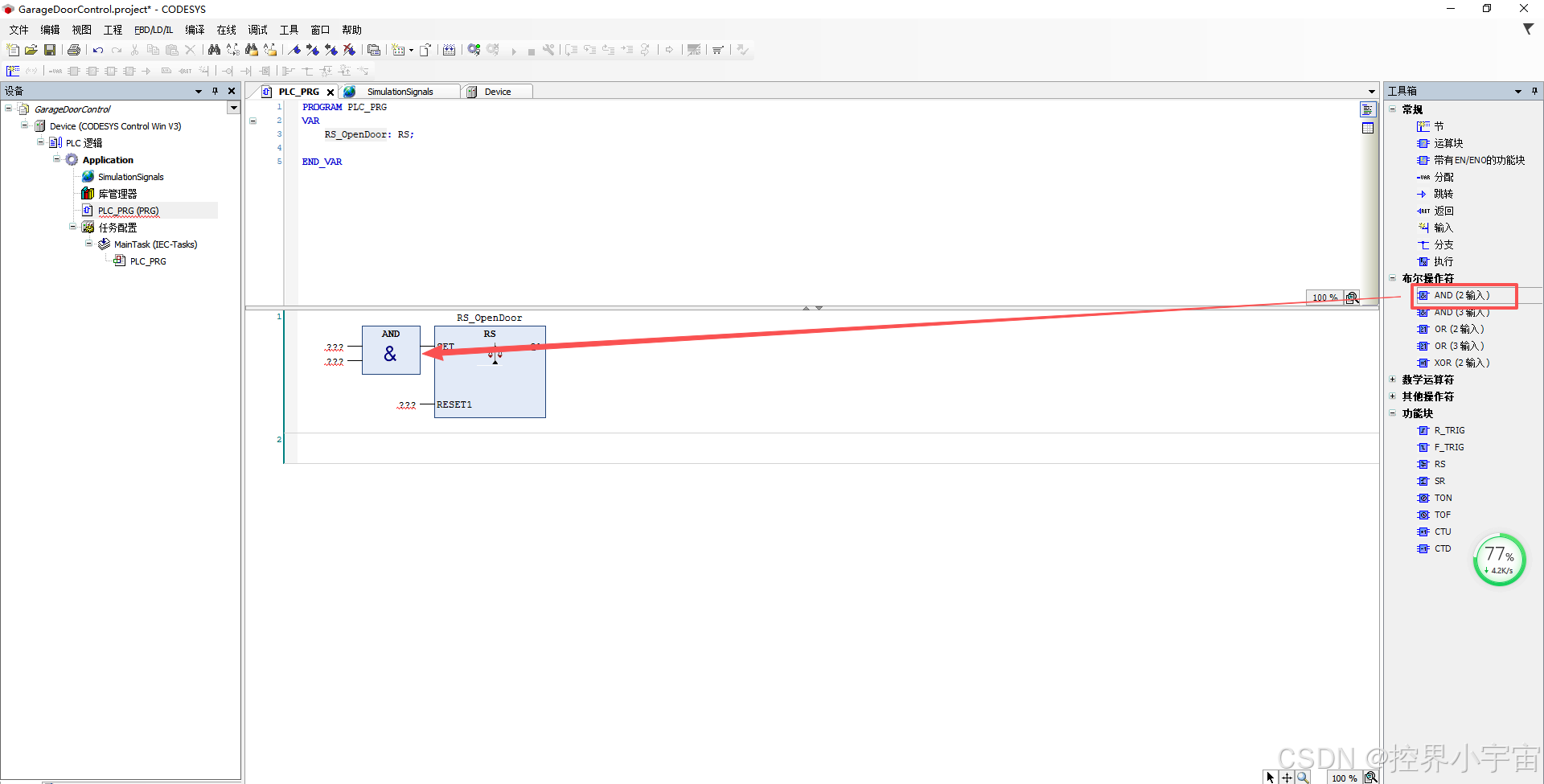
- 拖拽 2 输入 AND 操作符到 RS 功能块的 S 端;
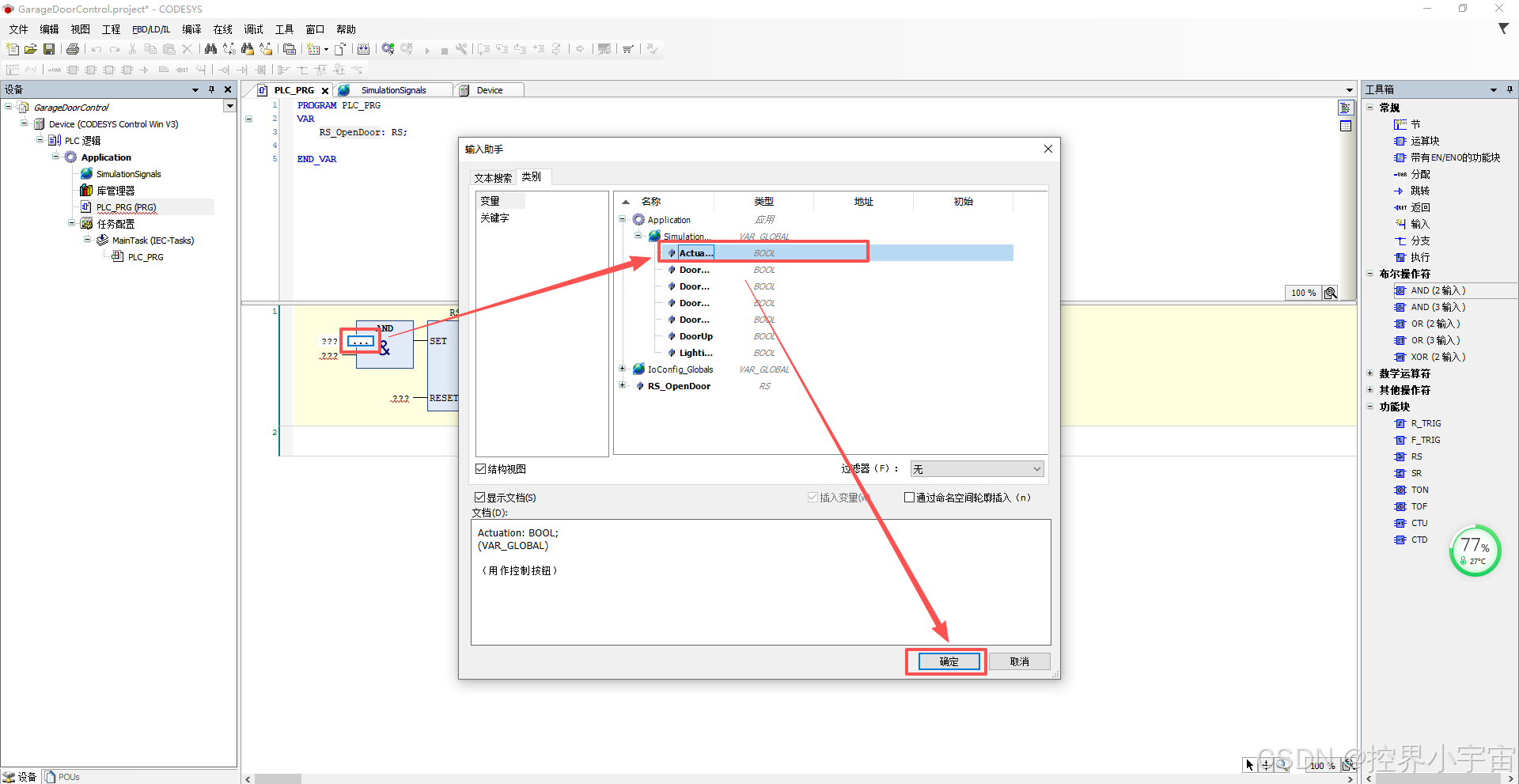
- AND 第一个输入端:连接控制按钮变量"Actuation",并添加"上升沿检测"(点击输入前标记,选择上升沿图标)------确保仅按钮按下瞬间触发;
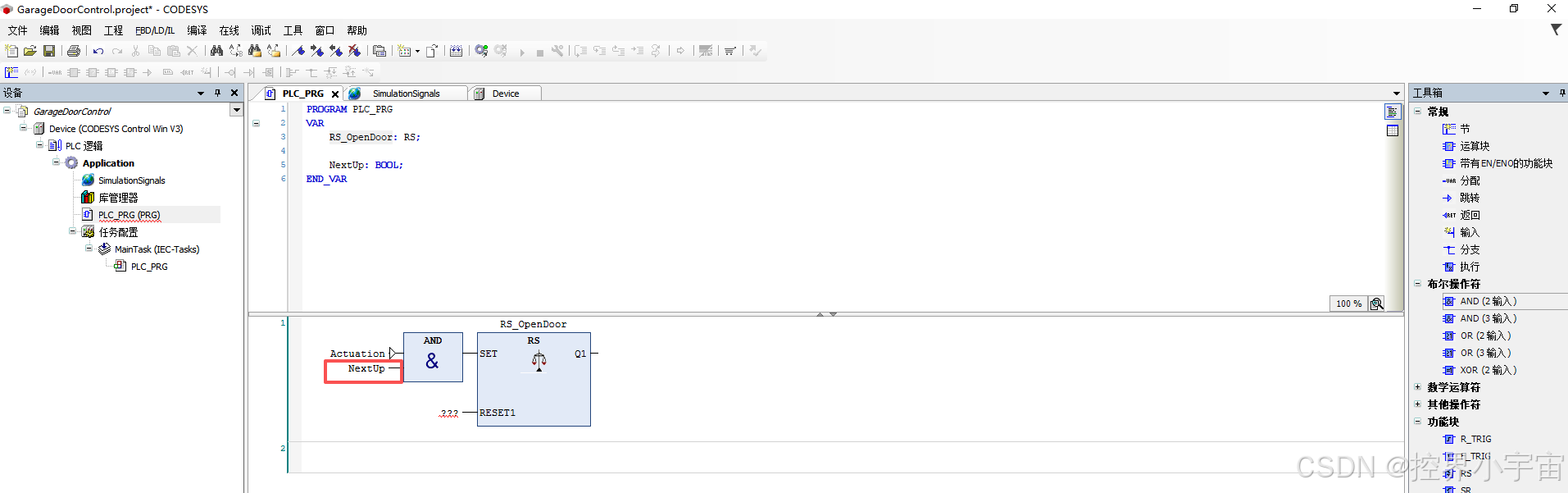
- AND 第二个输入端:添加中间变量"NextUp"(布尔类型,自动声明)------用于标识"下一个动作是开门",避免误触发。
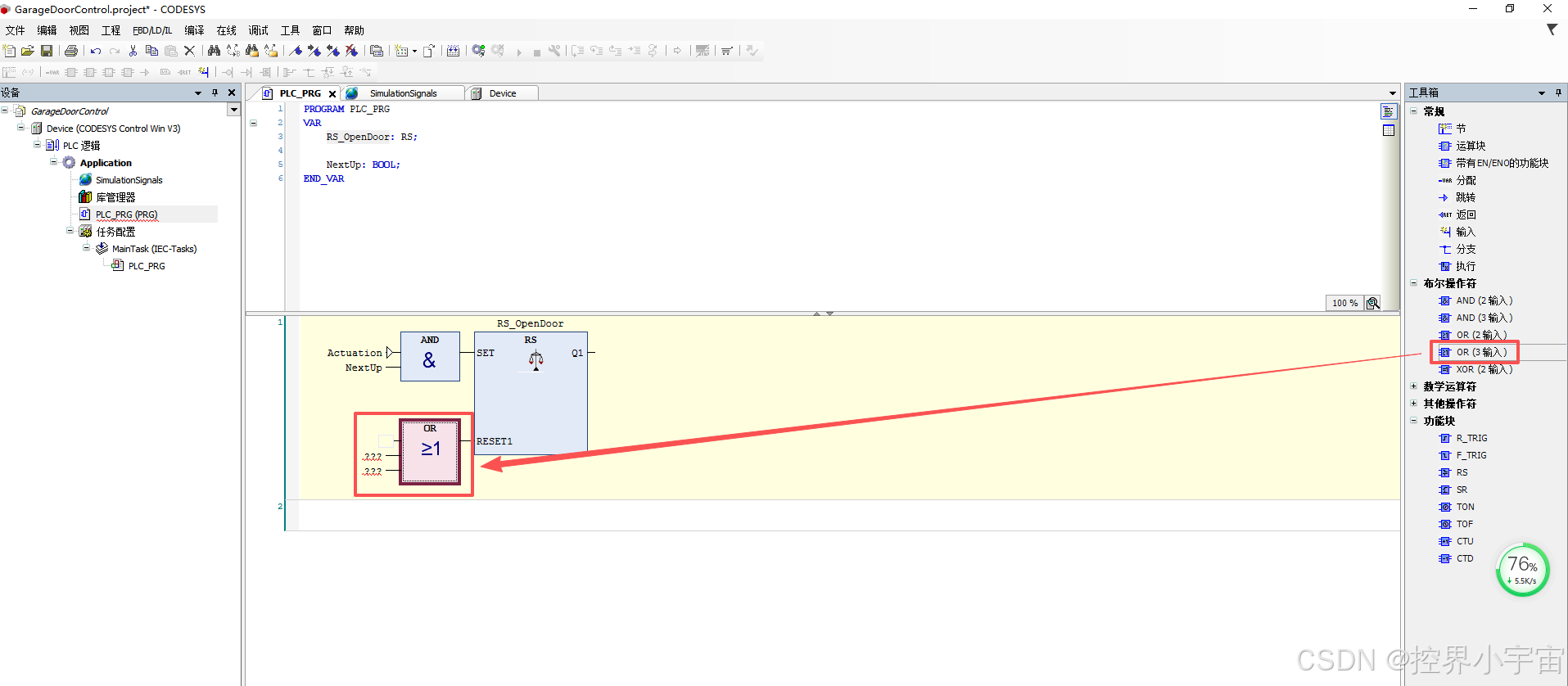
- 复位端(R)逻辑:实现"门完全打开、手动停止、出现错误"三种情况下停止开门。
- 拖拽 3 输入 OR 操作符到 RS 功能块的 R 端;
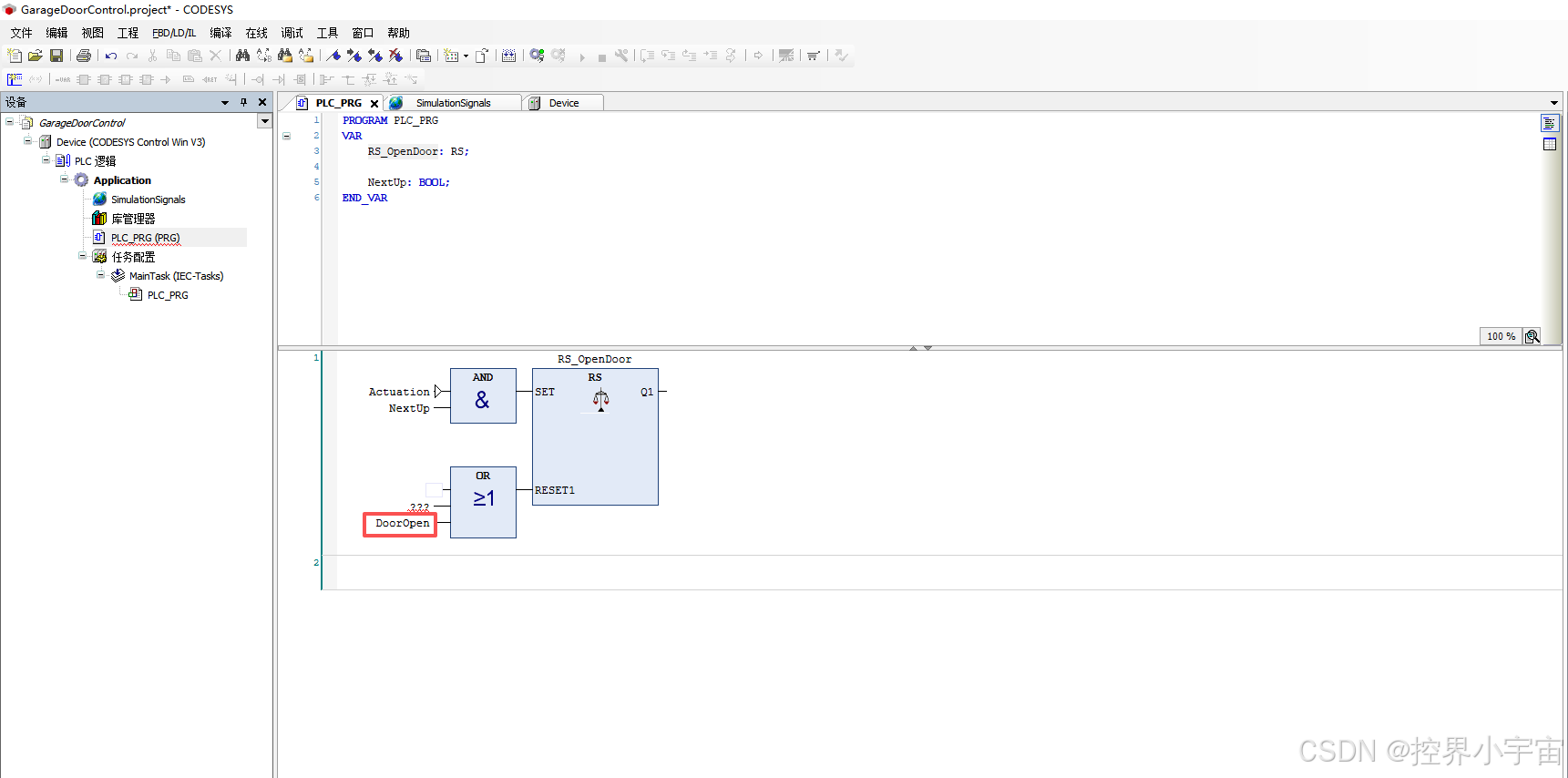
- 第一个输入端:连接门开传感器"DoorOpen"------门完全打开时复位;
- OR 第二个输入端:拖拽 2 输入 AND 操作符,连接"Actuation"(上升沿)和"DoorUp"------开门过程中再次按下按钮,手动停止;
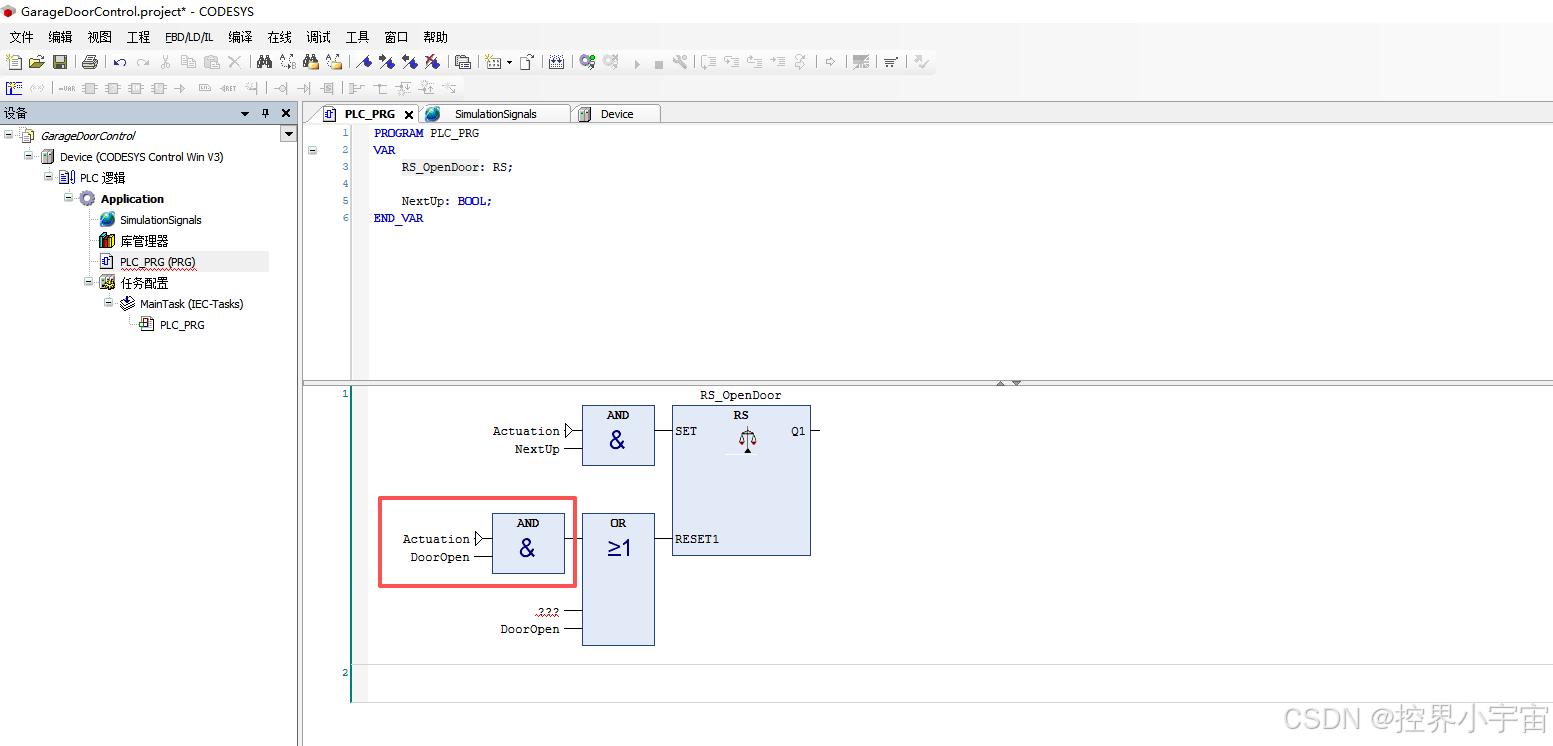
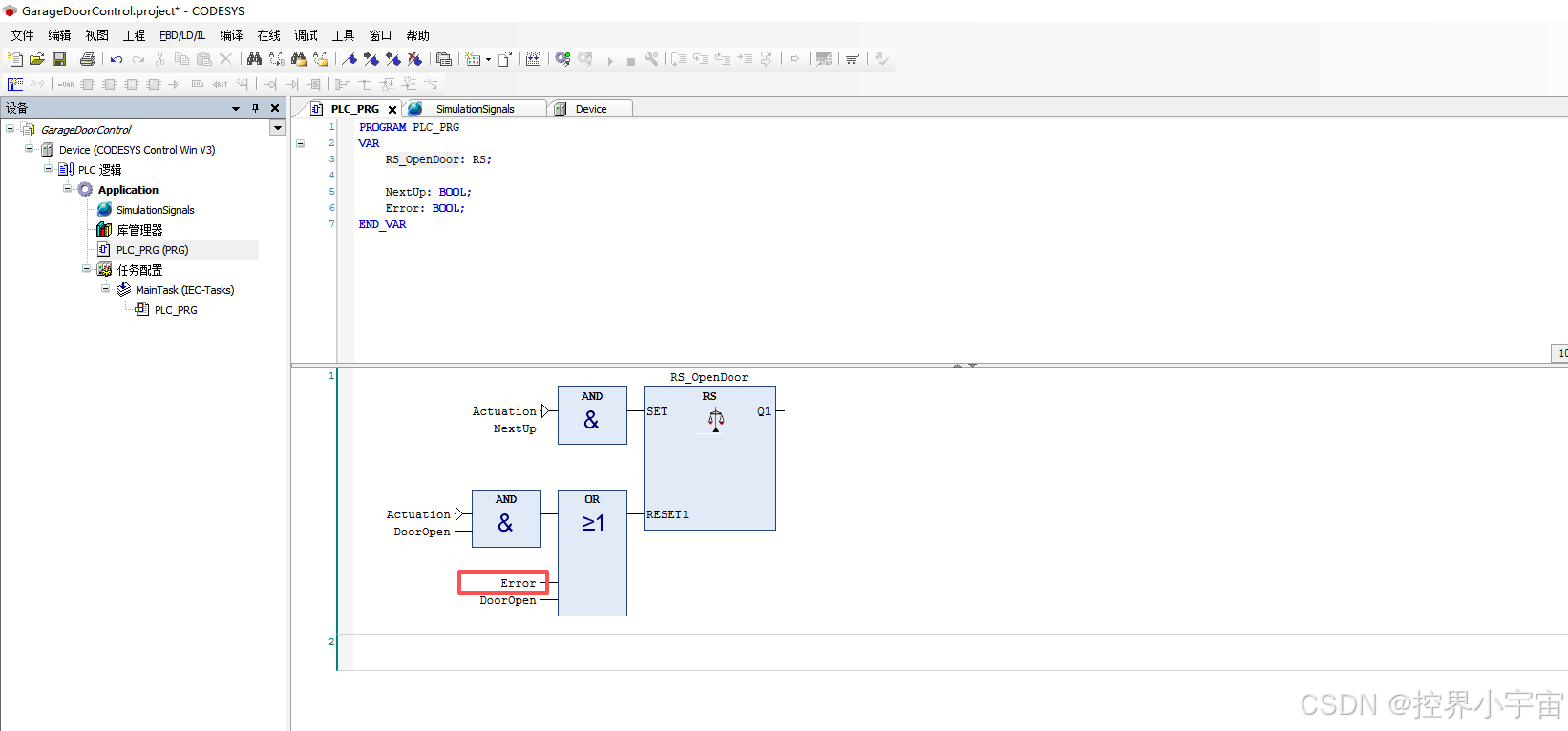
- OR 第三个输入端:连接中间变量"Error"(布尔类型,自动声明)------出现错误时停止。
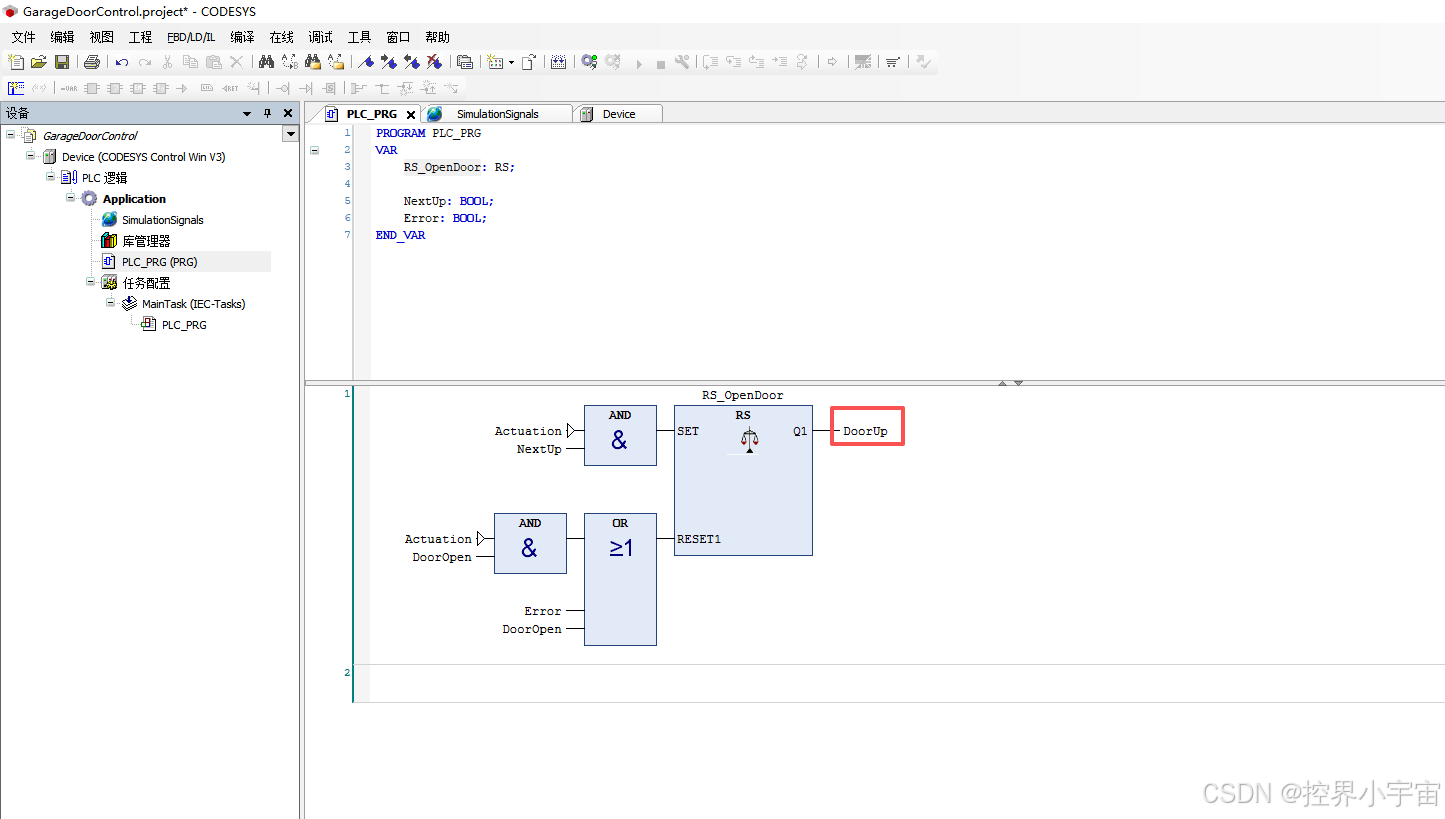
- 输出端(Q)连接:RS 功能块的 Q 端连接升门驱动"DoorUp"------置位时 DoorUp 为真,门开始打开;复位时 DoorUp 为假,门停止。
三、网络 2:关门控制逻辑
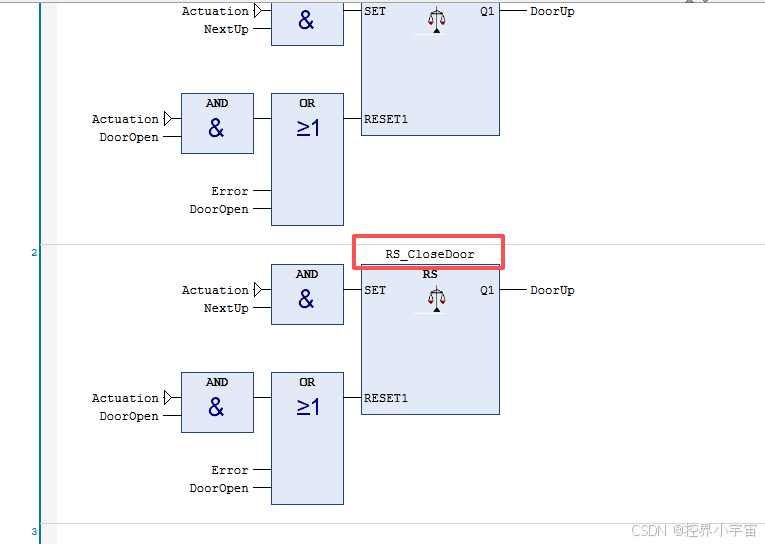
关门逻辑与开门逻辑几乎一致,可通过复制粘贴开门网络快速修改,核心修改点如下:
- 复制网络:选中网络 1,按"Ctrl+C"复制,"Ctrl+V"粘贴,生成网络 2。
- 修改功能块实例名:将 RS 功能块实例名改为"RS_CloseDoor"。
- 替换变量:
- AND 第二个输入端:将"NextUp"改为"NOT NextUp"(取反)------标识"下一个动作是关门";
- OR 第一个输入端:将"DoorOpen"改为"DoorClosed"(门闭传感器);
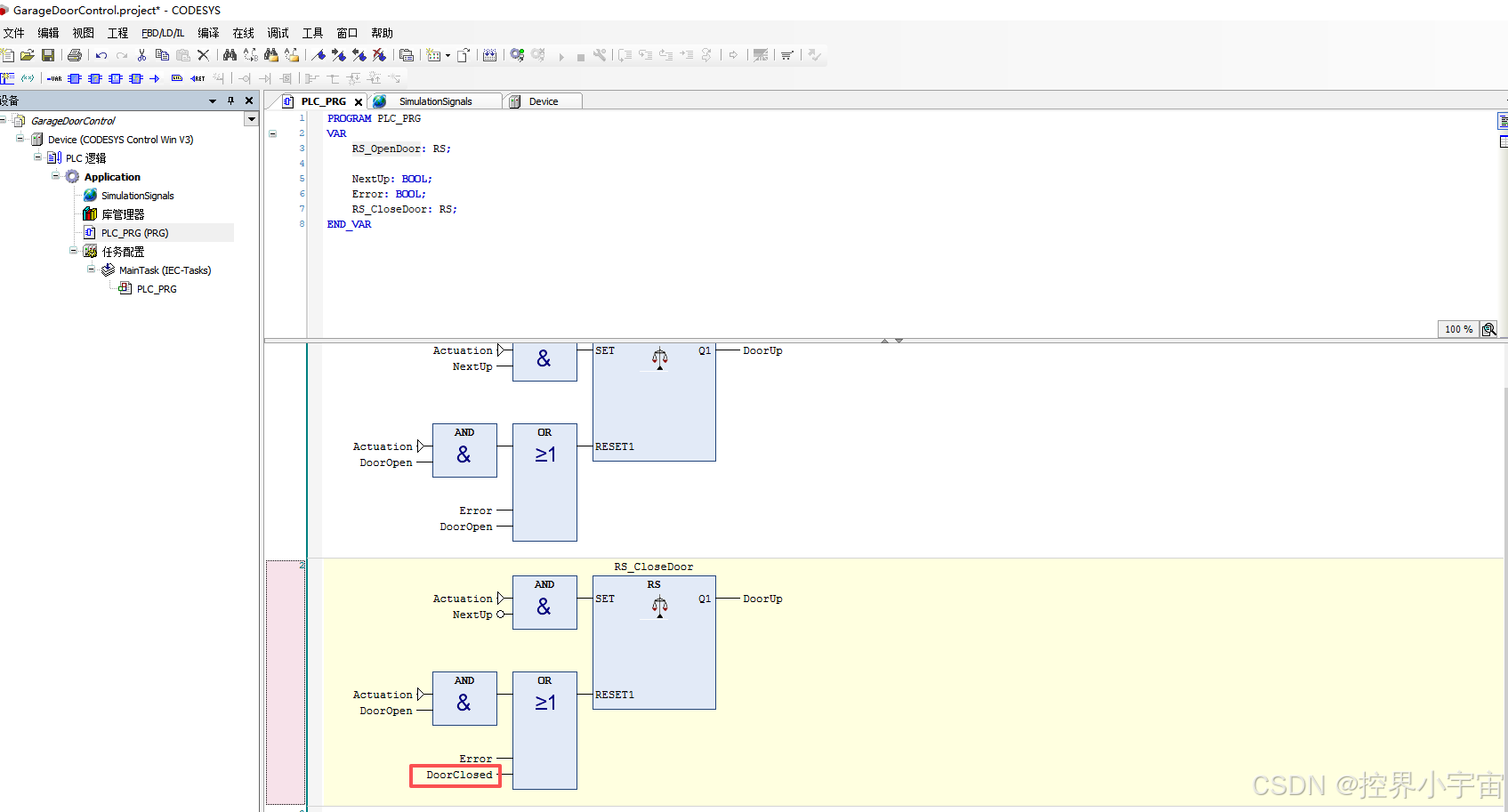
- OR 第二个输入端:将"DoorUp"改为"DoorDown"(降门驱动);
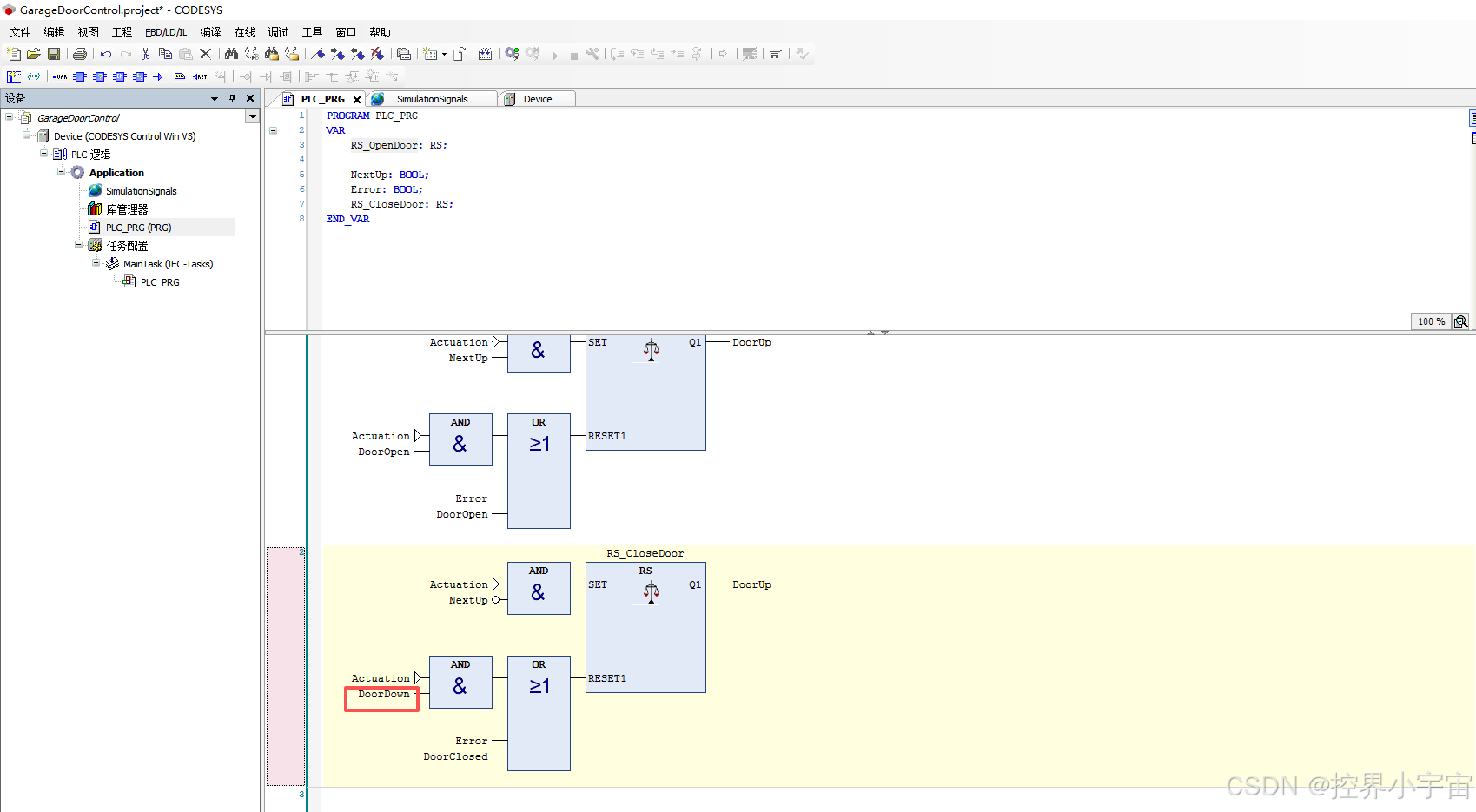
- RS 输出端:将"DoorUp"改为"DoorDown"(降门驱动)。
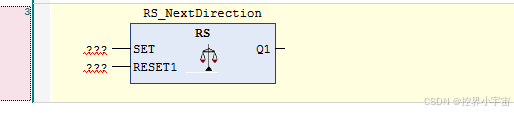
四、网络 3:动作方向切换逻辑(NextUp 变量控制)
中间变量"NextUp"用于标识下一个动作方向,需要通过前一次动作的结束信号自动切换,逻辑如下:
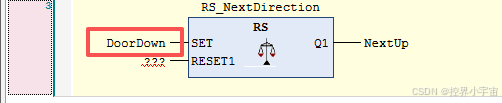
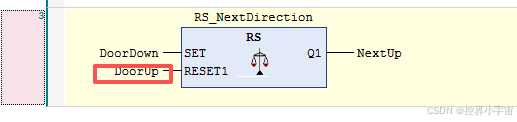
- 添加 RS 功能块:实例名设为"RS_NextDirection",输出端连接"NextUp"。
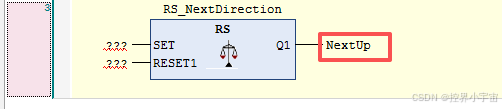
- 置位端(S):连接"DoorDown"的下降沿------关门动作结束(DoorDown 从真变假)时,置位 NextUp 为真,下一次按钮触发开门。
- 复位端(R):连接"DoorUp"的下降沿------开门动作结束(DoorUp 从真变假)时,复位 NextUp 为假,下一次按钮触发关门。
五、逻辑验证要点
完成核心控制逻辑后,可梳理关键逻辑链,确保无漏洞:
- 初始状态:所有变量为假,NextUp 为真→第一次按按钮,触发开门;
- 开门过程:DoorUp 为真,门运行→门完全打开(DoorOpen 为真),RS_OpenDoor 复位,DoorUp 为假,NextUp 复位为假;
- 关门触发:再次按按钮,NextUp 为假,触发关门;
- 手动停止:开门/关门过程中按按钮,通过 AND 操作符触发 RS 复位,停止动作。
核心控制逻辑已完成,下一篇我们将补充"错误监控"和"灯光控制"逻辑,完善整个项目的功能。